
 1,1,2
1,1,2- 1Joanneum Research, Digital, Graz, Austria (piluca.caballo-perucha@joanneum.at)
- 2VRVis Zentrum für Virtual Reality und Visualisierung Forschungs-GmbH, Vienna, Austria (rnowak@vrvis.at)
- 3GMV, Madrid, Spain (apellacani@gmv.com)
The AIDA (Asteroid Impact Deflection Assessment) mission involves DART (Double Asteroid Redirection Test) and Hera spacecraft. DART is led by the NASA and will impact the smaller body of Didymos, a binary asteroid. HERA [1], on the other hand, is a European project and will rendezvous Didymos in 2026 following up the impact produced in 2022 by DART.
Didymos is a near-Earth binary asteroid composed by Didymain, the main asteroid, and its moon called Didymoon. Didymain has an estimated radius of 387 m and a rotation period of 2.26 hours. Didymoon, whose approximate radius is 103 m, has a circular tidally locked orbit of 1180 m around Didymain and an orbital period of 11.92 hours.
The Austrian contribution to Phase B2 Part 1 of the HERA mission was carried out by JR, VRVis, and two science collaborators under GMV contract. It consisted mainly of the design of tools needed to help define optimized images of Didymos (Didymain and Didymoon) for tactical and strategic purposes as well as to determine the asteroid shape. For both purposes, the further development of PRoViP [2] and PRo3D [3], tools already available for the ExoMars mission, was required. To validate the 3D reconstruction chain, a simulation approach was designed and implemented, see Figure 1:

Image rendering
In order to generate synthetic images of Didymos in the most representative and faithful way, the information about the geometry of the Asteroid Frame Camera (AFC) aboard the HERA spacecraft, its planned positions and orientations along the available trajectories (e.g.: Early Characterization Phase –ECP–, Detailed Characterization Phase –DCP-1–, Detailed Characterization Phase –DCP-2– and Very Close Fly-Bys –VCFB–), the shape parameters of Didymos as well as solar illumination direction had to be considered.
For image rendering, the PRo3D Viewer [3] was used and interfaced via a .json file with these parameters for each individual image to be rendered, including information about the AFC geometry as "fieldOfView" and "resolution" entries. AFC poses, Sun, Didymain and Didymoon positions and orientations were established by means of the HERA Spice Kernels, delivered by GMV, where the barycenter of Didymain is defined as the origin of the coordinate system and its position is always fixed at (0, 0, 0).
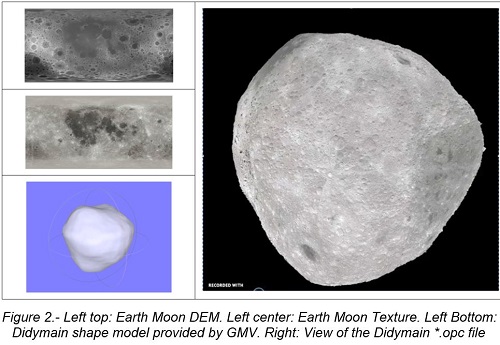
For rendering with PRo3D, the shape and dimensions of Didymos were necessary and provided as *.txt files by GMV (Figure 2: Left Bottom). To enhance the realisms of the synthetic images JR added texture and relief to this data (Figure 2, right). For this purpose, the texture and 3D information of Earth Moon surface (as arbitrary texture to test the workflow) were used (Figure 2, Left top and Left centre). In this step, the *.txt files were converted into *.opc (Ordered Points Cloud) files [4], i.e.: the mandatory format for the PRo3D Viewer.
A subset (463/731) of the resulting rendered images of Didymain along DCP-1 trajectory can be seen in Figure 3. The HERA approach to Didymain (from 23 to 10 Km) along the trajectory can be observed.

Shape reconstruction
In order to determine the Didymain shape, the images rendered with PRo3D (e.g.: Figure 3) were supplied to ColMap [5] tool, embedded in PRoViP. ColMap performs 3D reconstruction by means of Structure from Motion (SfM) technique, which assumes that the object to be reconstructed (Didymain) or the sensor (AFC) remains motionless. As Hera AFC moves along the trajectory (e.g. DCP-1) at the same time that Didymain performs its rotation movement, this assumption is violated. In order to establish correct SfM conditions, all AFC poses and orientations calculated with the Spice kernels had to be transformed with the inverse rotations of Didymain to simulate a moving camera around a static scene. Once the rotations were computed the new transformation matrices were provided to ColMap in the “image.txt” file, with following format:
<#>
“#” denotes the frame number, “Q0-Q3” specify the rotation in (Hamilton) quaternion notation and “T0-T2” the translation for the current frame. “CID” indicates the used camera, for this case always the AFC and “filename” defines the corresponding image file, i.e.: the rendered image. In the same way, the intrinsic parameters of the AFC were given in the “cameras.txt” file, which format is as follows:
<#>
Here “#” specifies the camera id (i.e.: the AFC). “CAMERA_TYPE” defines the used camera model (i.e. Pinhole, Radial etc.), set to SIMPLE_PINHOLE for the AFC. “Width” and “Height” define the image width in pixels following the AFC specifications (1024 by 1024 pixels) and “PARAMS” contains (in the case of SIMPLE_PINHOLE cameras) the FoV in pixels and the principal point.
The reconstructed camera poses calculated with ColMap are represented in Figure 4. They are expressed in the Didymain reference frame and, as mentioned before, do not represent the real AFC positions along the DCP-1 trajectory as calculated with the kernels, but the transformed cameras’ positions required for SfM.

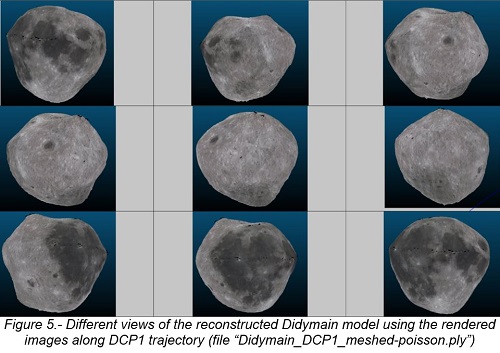
Several views (9) of the resulting 3D reconstructed dense Didymain model (“Didymain_DCP1_meshed-poisson.ply” file) are represented in Figure 5. The resulting statistics of the reconstruction can be seen in Table 1:

Conclusion
The Austrian contribution to Phase B2 Part 1 of the HERA project revealed by means of a simulation approach that PRo3D and ColMap are powerful and flexible tools that were further developed to fulfil requirements for 3D-reconstruction of small bodies (asteroids) in space exploration projects.
[1] – Pellacani, Graziano, Fittock, Gil, Carnelli (2019). HERA vision based GNC and autonomy. 8th European Conference for Aeronautics and Space Sciences (EUCASS).
[2] – Paar, Deen, Muller, Silva, Iles, Shaukat, Gao (2016). Vision and image processing. In Contemporary Planetary Robotics: An Approach Toward Autonomous Systems, John Wiley & Sons.
[3] – Barnes, Sanjeev, Traxler, Hesina, Ortner, Paar, et al. (2018). Geological analysis of Martian rover-derived Digital Outcrop Models using the 3D visualisation tool, Planetary Robotics 3D Viewer - Pro3D. In Planetary Mapping: Methods, Tools for Scientific Analysis and Exploratio.
[4] – Brunnhuber, May, Traxler, Hesina, Glatzl, Kontrus (2017). Using Different Data Sources for New Findings in Visualization of Highly Detailed Urban Data. REAL CORP 2017 Proceedings
[5] – ColMap tool.
How to cite: Caballo Perucha, M. P., Nowak, R., Hafner, P., Klopschitz, M., Pellacani, A., Fritz, L., Paar, G., and Traxler, C.: Didymos images´ simulation for 3D reconstruction within HERA project, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-123, https://doi.org/10.5194/epsc2020-123, 2020.