
Subsurface radar evidence of cryovolcanic resurfacing on the Jovian moon Ganymede: RIME detectability analysis

- University of Trento, Department of Information Engineering and Computer Science, Italy
Introduction
Smooth bright terrains represent the stratigraphically youngest geological units on Ganymede. One plausible theory explaining their unusual smoothness is based on cryo-volcanic eruptions of low-viscosity water-ice lava, flooding the pre-existing rough terrain to an equipotential flat surface [1]. The cryo-volcanic resurfacing hypothesis is interesting since it implies the presence of local melting or liquid water in the shallow crust of Ganymede. However, due to lack of concrete evidence of source vents of cryo-magma, the theories of cryovolcanic origins of the bright terrain are debatable.
These ambiguities can be resolved by directly imaging the subsurface using low-frequency ice-penetrating radar sounders. This is the case of the Radar for Icy Moon Exploration (RIME) [2] on board the ESA’s Jupiter Icy Moons Explorer (JUICE). RIME is designed to achieve a penetration up to 9 km through the ice crust, by operating at a central frequency of 9 MHz with a programmable bandwidth (high-resolution 2.8 MHz, low-resolution 1 MHz). In order to understand the RIME capability in resolving the possible evidence of cryovolcanic resurfacing, it is necessary to model the radar response using radar sounder simulations.
The goal of this analysis is to model the geo-electrical hypotheses of cryovolcanic resurfacing on Ganymede and simulate the corresponding RIME radargrams. One of the main challenges to accomplish this task is the limited availability of high-resolution topographic data over the potential cryovolcanic targets required for generating the simulation inputs. This might be partially mitigated using manually sketched models, flexible enough for tuning the topographic parameters. However, the process is subjective, and manually generated models are a simplified approximation of reality. To address this limitation, in this paper we propose automatic modelling of the target, coupled with a simulation approach, which is described in the next section.
Modelling and Simulation Approach
Our model assumes that the smooth bright terrain represents the surface of a partially flooded pre-existing dark terrain. This underlying terrain is modelled as a superposition of sinusoids (large-scale undulations) and steps (horst-graben morphology). The overlying surface is a nearly-flat surface and positioned at the mean elevation of the pre-existing terrain.
Let Δx represent the required spacing between the topographic samples. Let x=0,Δx,2Δx,...X be the along-track position axis, where X is the required length of the profile. Let λS and AS be the short wavelengths and amplitudes, respectively (representing the spacing between the grabens), superimposed over long topographic wavelengths (λL) with amplitude AL (representing the ridges and troughs). The topographic profile in the along-track direction is given by:
z(x) = AS Rect( 2πx / λS ) + AL cos( 2πx / λL )
For the topography of the overlying surface, a Gaussian roughness of variable RMS height is added in order to avoid unrealistically smooth interfaces that can result in spurious specular reflections. For the complex dielectric permittivity, we consider 2.9 + 3x10-4i for the top layer and 3.5 + 3x10-3i for the buried layer.
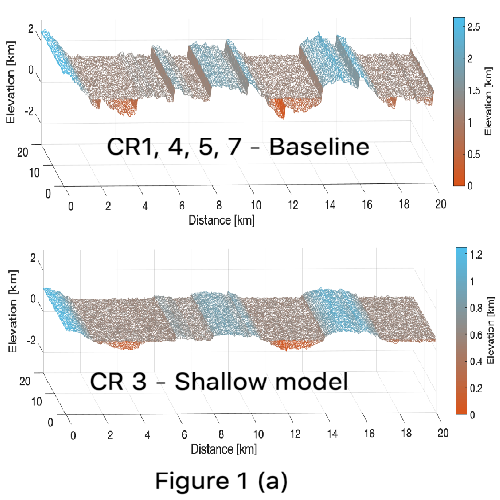
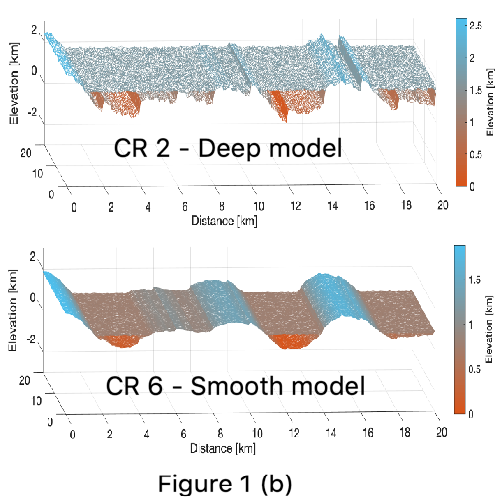
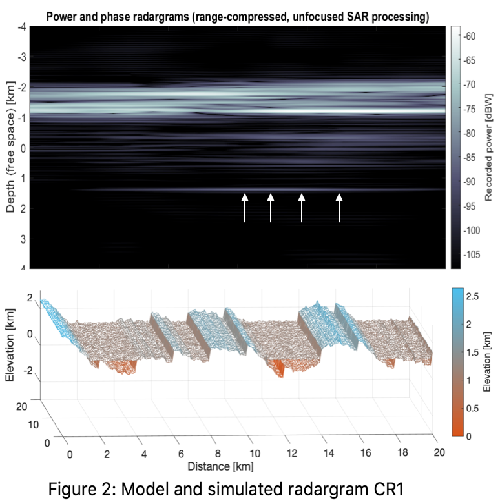
By varying the topographic parameters, we generate target models having different depths of resurfacing (average thickness between the surface and the buried layer) and RMS roughness. Further variations are introduced in the orientation of the track and the selection of the RIME bandwidth. The models are summarized in Table 1 and their geometries are visualized in Figure 1 (a) and (b). For comparison, the hypothesis CR 1 is chosen as the baseline model, while the other cases are generated by varying one parameter (yellow cells) relative to the baseline. For simulating the radar response, a multi-layer coherent simulator is considered [3], using the generated target models and the parameters of RIME [2] as input. Figure 2 shows the simulated radargram for the baseline case model (CR 1). The radargrams are processed using unfocussed synthetic aperture radar technique (coherent summing of consecutive radar traces). In this example, the buried layer is clearly detectable as a relatively lower intensity reflector (indicated by white arrows).

Results and Discussions
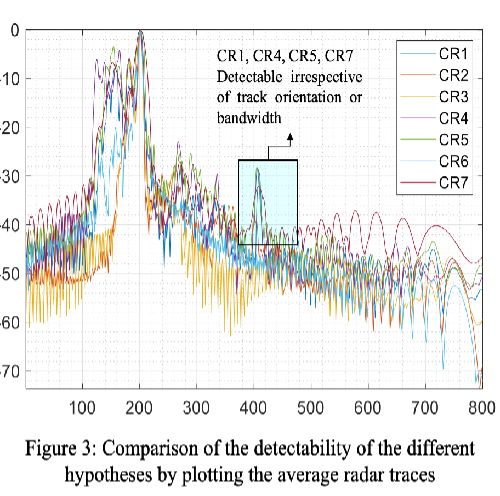
In the simulation chain, the contribution of the Jovian radio noise has not been considered by assuming anti-Jovian acquisitions. To assess the detectability of the terrain buried under cryovolcanic resurfacing, the subsurface to surface power ratio (SSR) is used. Figure 3 shows the average power of the radar traces of the simulated radargrams. In all the cases, the buried terrain is clearly detectable above the sidelobes, with an SSR in the range between -28 dB and -38 dB. In particular, the deepest reflections in the baseline case models (CR1, CR4, CR5, CR7) appear as clearly distinguishable prominent peaks, irrespective of the differences in either the track orientation or the bandwidth. Furthermore, in case of the shallow (CR3) and the smooth (CR6) models, the buried terrain is weakly detectable, thus pointing the role of off-nadir clutter and subsurface scattering in controlling the performance.
Conclusions
We have presented an analysis of the RIME capability to detect the subsurface evidence of cryovolcanic resurfacing of the smooth bright terrains on Ganymede. The dielectric contrast between the cryo-lava and the older terrain is not expected to be significant (since both are primarily composed of ice having different fractions of impurity). However, the subsurface interface is found to be clearly detectable, owing to the scattering caused by the interface roughness of the underlying layer. This work will be further developed by: (1) studying the effects of small-scale roughness and dielectric contrast using more advanced simulators, and (2) using fully-focused SAR processing to improve the assessment of the detectability.
References
[1] Schenk, Paul M., et al. "Flooding of Ganymede's bright terrains by low-viscosity water-ice lavas." Nature 410.6824 (2001)
[2] Bruzzone, Lorenzo, et al. "Jupiter Icy Moon Explorer (JUICE): Advances in the design of the Radar for Icy Moons (RIME)." 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). IEEE (2015)
[3] Gerekos, Christopher, et al. "A coherent multilayer simulator of radargrams acquired by radar sounder instruments." IEEE Transactions on Geoscience and Remote Sensing 56.12 (2018)
Acknowledgements
This work is supported by the Italian Space Agency under Grant No ASI 2018-25-HH.0 in the framework of “Attività scientifiche per JUICE fase C/D”.
How to cite: Thakur, S. and Bruzzone, L.: Subsurface radar evidence of cryovolcanic resurfacing on the Jovian moon Ganymede: RIME detectability analysis, Europlanet Science Congress 2020, online, 21 September–9 Oct 2020, EPSC2020-259, https://doi.org/10.5194/epsc2020-259, 2020