
Venus subsurface targets: assessment of detectability using radar sounder simulations
 1,
1,- 1University of Trento, Department of Information Engineering and Computer Science, Italy
- 2Foundazione di Bruno Kessler, Trento, Italy
Introduction
Future exploration of Venus with state-of-the-art instruments can significantly improve our knowledge of the planet. Following this objective, EnVision is selected as one of the three candidates for the ESA’s Cosmic Vision M5 missions, with the goal of understanding the evolution of surface and interior, present-day geological activity and the climate of Venus. Subsurface Radar Sounder (SRS) onboard EnVision, is a nadir-looking low-frequency radar capable of profiling the shallow subsurface of Venus. SRS aims to support the understanding of the geological history of Venus by searching for subsurface dielectric interfaces characterizing structural and compositional discontinuities. The ability of SRS in extracting valuable scientific information depends on the properties of the geological targets and the instrument parameters. The current phase A of SRS design addresses the complex task of characterizing the target properties despite the large uncertainty on them. Thus, for understanding their detectability, a structured simulation strategy is developed considering many different possible target hypotheses.
This paper presents the simulation results and analysis of the SRS capability to detect three subsurface targets - buried craters, tesserae and lava flows. This is done considering the baseline design parameters of SRS (9 MHz central frequency, 6 MHz bandwidth) and a set of assumptions on the expected dielectric properties (real permittivity ε, loss tangent tanδ, and contrast Δε) of basalts at Venus temperatures [1]. For generating the target geo-electrical models of the crater and tessera, 75 m resolution Magellan stereo DEMs [2] are used. Their radargrams are simulated using a multi-layered coherent radargram simulator (MRS) [3] (processed for range compression and unfocussed SAR and do not contain noise). For the lava flows, DEMs are not available. Thus, Mars-analog lava flow radargrams acquired by SHARAD have been reprocessed to simulate the fully processed SRS radargrams using analog-based simulation approach [4].
Buried Crater
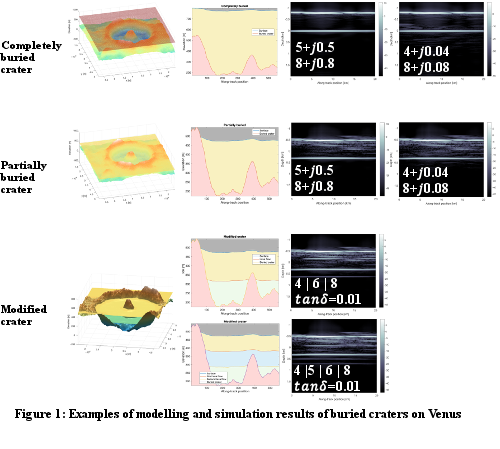
Craters on Venus are modified volcanically or tectonically, even to the extent of being completely buried without any surface expression. EnVision will determine the nature and thickness of post-impact infilling as indicators of relative surface age and modification history. SRS will support this goal by searching for buried impact craters and stratigraphic horizons representing different phases of resurfacing in the modified craters. For this target, the DEM of a Venus crater is modelled as embayed by one or more smooth overlying interfaces, resulting in the three possible scenarios (Fig.1): (1) completely buried, (2) partially buried, and (3) modified in multiple episodes. The dielectric permittivity values of the target layers are selected assuming that the deeper layers have higher real permittivity, owing to compaction to a higher density. For the completely buried scenario, the crater is clearly detectable when tanδ<0.1, while for the other two cases, the subsurface interfaces are detectable for tanδ∈[0.1-0.01]. The surface also contains the rim of the buried crater, which contributes to off-nadir clutter. Furthermore, for the modified crater, the different episodes of embayment are also clearly distinguishable.
Tessera
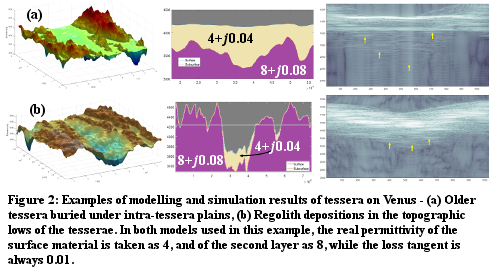
The tessera highlands may preserve the oldest terrains on Venus and record a complex geological history. The investigation of tesserae will be supported by searching for subsurface interfaces beneath the different tessera terrains to constrain their formation models. SRS will explore the detectability of the two hypotheses shown in Fig.2: (a) the continuity of the exposed tessera units partially buried beneath the intra-tessera plains, and (b) the presence of sediments (or in-situ weathered material) blanketing the tesserae. The available eroded tessera DEM represents the subsurface interface in Model-(a) (nearly-flat intra-tessera plains fill the troughs of the tessera), and the surface layer in Model-(b) (weathered material is deposited in the troughs). In Model-(a), the subsurface intensity is lower owing to the greater depth, while in Model-(b), clutter may obstruct the unambiguous extraction of the basal interface in regions of very shallow deposition. Nevertheless, the subsurface is detectable in both cases (yellow arrows). Moreover, the detectability can be significantly improved by fully focussed SAR processing, which is the baseline for SRS.
Lava flows
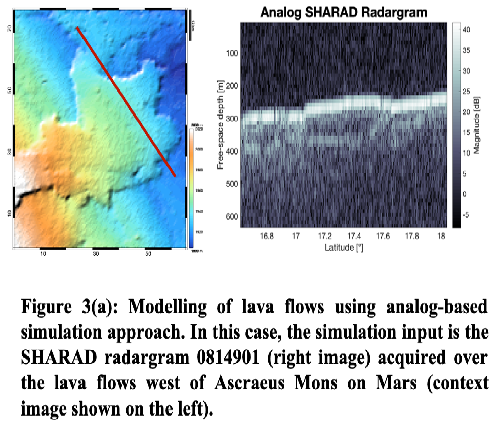
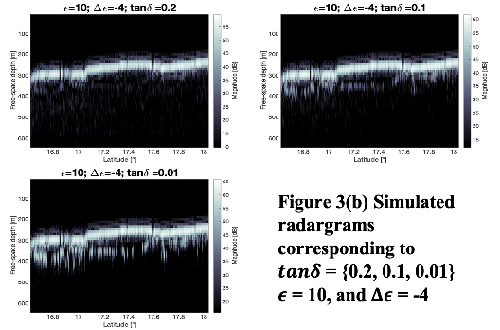
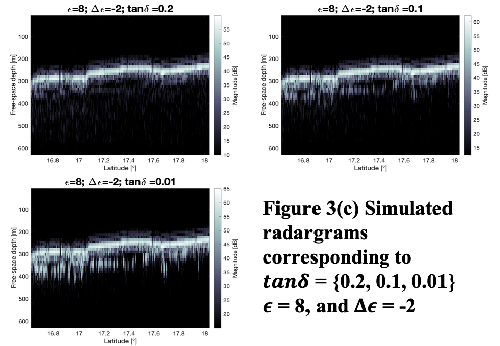
Volcanic eruptions are known to be the most important resurfacing mechanisms on Venus. EnVision aims to determine the nature and thickness of lava flows to understand their modes of emplacement, magma properties, dominant sources, and relative age. SRS will contribute to this goal by searching for the base of lava flows. Similar lava flows have been detected on Mars in several SHARAD radargrams [5]. We have used one of them (0814901) as input to the analog-based simulator [4]. Considering higher metal content, the overlying younger lava flow is assumed to have ε∈[8-10] and tanδ∈[0-01-0.2], while the underlying older and weathered flow is assumed to have ε∈[4-6]. From Figure 3(a-c), we see that the base is easily detectable for tanδ≤0.1, while even for tanδ=0.2, the interface can be seen, although with a weakly reflected power.
Conclusions
This paper presents a simulation-based analysis of the detectability of Venus subsurface targets by SRS on-board EnVision. The results indicate that the baseline design of SRS meets the required detection performance for the considered important Venusian targets. Further experiments and simulations are in progress to consolidate the selection of the baseline bandwidth and central frequency in order to optimize the achievement of the science goals of the mission.
References
[1] St.Amant, M.(1968), “Frequency and temperature dependence of dielectric properties of some common rocks.”
[2] Herrick, R. et. al.(2010) "A new data set for Venus: Stereo-derived topography for 20% of the planet at km-scale horizontal resolution." Lunar and Planetary Science Conference.
[3] Gerekos, C., et al.(2018). “A coherent multilayer simulator of radargrams acquired by radar sounder instruments.” IEEE Transactions on Geoscience and Remote Sensing.
[4] Thakur, S., & Bruzzone, L.(2019). “An approach to the simulation of radar sounder radargrams based on geological analogs.” IEEE Transactions on Geoscience and Remote Sensing.
[5] Carter, L., et al.(2009). “Dielectric properties of lava flows west of Ascraeus Mons, Mars.” Geophysical Research Letters.
Acknowledgements
This work is funded by Italian Space Agency under the contract “Attività scientifiche per il radar sounder di EnVision fase A” n.2019-25-HH.0.
How to cite: Thakur, S., Sbalchiero, E., Paolaz, E., Bovolo, F., and Bruzzone, L.: Venus subsurface targets: assessment of detectability using radar sounder simulations, Europlanet Science Congress 2020, online, 21 September–9 Oct 2020, EPSC2020-374, https://doi.org/10.5194/epsc2020-374, 2020