
Candidate landing sites and possible traverses at the South Pole of the Moon for the LUVMI-X rover
 2,2,
2,2,- 1Ecole Nationale Supérieure de Géologie, Université de Lorraine, 54500 Vandœuvre-lès-Nancy, France (marine.jld21@gmail.com).
- 2CRPG, CNRS/Université de Lorraine, 54500 Vandœuvre-lès-Nancy, France.
- 3Space Applications Services NV/SA, 1932 St-Stevens-Woluwe, Belgium.
- 4Institute of Astronautics, Technische Universität München, 85748 Garching, Germany.
- 5Faculty of Science, Technology, Engineering & Mathematics, The Open University, Milton Keynes, UK.
1. Introduction
Lunar volatiles, such as water, are considered to be a crucial resource for In Situ Resource Utilization (ISRU) in using the Moon as an enabling platform for future space exploration. As water is most likely to be found in the form of ice at the lunar poles (temperature of stability in vacuum: 110K [1]), multiple missions target the South Pole cold traps [2]. With challenging conditions (rough topography, low illumination, low temperatures, and limited Earth visibility; [3] and references within), the South Pole comprises numerous PSR (Permanently Shadowed Regions) which are cold enough to capture and retain volatiles such as water ice (annual average temperatures of 40K [2]). Funded by the EU program Horizon 2020, Space Applications Services coordinates the LUVMI-X (LUnar Volatiles Mobile Instrument) project, where the company develops a robotic platform and international partners develop a dedicated payload suite [4], aimed at sampling and analyzing lunar volatiles in these polar regions. LUVMI-X is a commercial rover with modular interfaces to facilitate the integration of payloads from the community. The goal of this paper is to find suitable landing sites and study areas for this rover, that are both scientifically interesting and technically reachable [2,3].
2. Selection of criteria and data
Available remote sensing imagery for the lunar South Pole (Table 1) was downloaded from the PDS or corresponding instruments ’websites and added into a Geographic Information System (GIS). LUVMI-X scientific objectives and technical specifications were then translated into a list of criteria and computed in our GIS [3,4]. Using ArcGIS, reclassified data were overlaid with different weights to define and rank compliant areas which respect the established constraints (Table 1). Regions Of Interest (ROI) were finally identified by mapping out compliant areas > 80 km2 (i.e., areas allegedly large enough to hold a 10km-diameter landing ellipse. This arbitrary ellipse size is based on the technical abilities of current commercial landers).
3. Landing sites ranking and selection
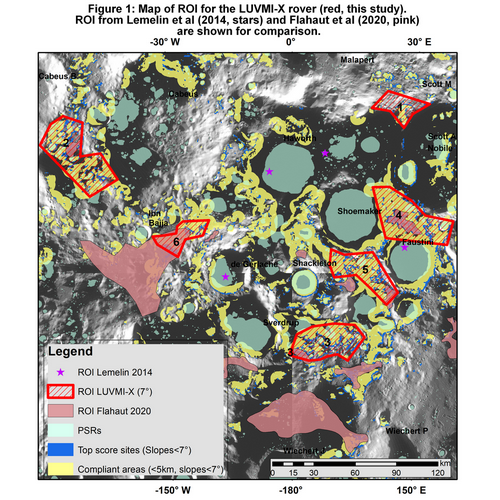
Results of the GIS analysis (Figure 1) show six identified ROI (red) for the LUVMI-X mission, which are compared with previous ROI from the literature (Lemelin et al, 2014, stars [6]; Flahaut et al, 2019, pink [2]). First, none of the LUVMI-X ROI intersects with Lemelin’s landing sites because the latter are only in PSR; Lemelin's sites do not meet the technical specifications of the LUVMI-X rover (areas without illumination are not accessible for a solar-powered rover). However, parts of Flahaut’s ROI overlap with the LUVMI-X sites of this study. Flahaut’s largest ROI (Amundsen, Ibn Bajja) do not or only partially overlay with LUVMI-X ROI as Flahaut’s study only considers surface water ice (with a temperature of 110K maximum). This study is intended for rovers unable to drill, which is not the case for LUVMI-X (drilling is possible down to 20cm).
The identified ROI are further ranked based on areas and statistics on Sun and Earth visibilities, temperatures, and H signatures. ROI 1 has the best mean Sun and Earth visibilities, but its amount of non-compliant pixels and the temperature are too high. Furthermore, its area is too restricted to hold a perfectly circular ellipse of 10 km, which is also true for ROI 6. ROI 2 and 3 are discarded as they contain high percentages of non-compliant pixels. H signatures from Lunar Exploration Neutron Detector (LEND) and water ice signatures from Moon Mineralogy Mapper (M3) [7] of ROI 4 and 5 were then compared. ROI 4 seems to present more evidence of surface water ice, which is a strategic asset in case LUVMI-X encounters drilling issues. This ROI presents the highest score in H signatures (LPNS, LEND) and the lowest temperatures while comprising the best site selected by Flahaut et al [2].
4. Perspectives for LUVMI-X
The requirements from some CLPS landers include slopes < 10°, which is larger than used in our initial study [8]. Future work includes revision of our ROI with an eventually relaxed set of parameters, and selection of 1-3 test sites for establishing traverses based on the mission’s initial scenario.
Traverses will be established by listing different specifications based on LUVMI-X concept of operations and scientific objectives, in order to identify “waypoints” (stops along the traverse). High resolution mosaics from the LROC’s Narrow Angle Camera (resolution of 1m/px) and LOLA 20m/px DEM will be used to map potential hazards and check PSR accessibility. The established waypoints should then be linked either by minimizing the used energy or maximizing Sun and/or Earth visibilities and will be used as an input to parametric and thermal models of the rover.
5. References
[1] Paige D. et al. (2010). Science, 330, 479-480.
[2] Crawford J. et al. (2020). Lunar Resources.
[3] Flahaut J. et al. (2020). Planetary and Space Science, 104750.
[4] Gancet J. et al. (2019). LUVMI and LUXMI-X Concept and extension. In the proc. of ESA ASTRA Symposium.
[5] Mazarico E. et al. (2011). Icarus, 211.
[6] Lemelin et al. (2014). Planetary and Space Science, 101.
[7] Li S. et al. (2018). Proc. Natl. Acad. Sci. 115 (36).
[8] Astrobotic. (2020). Peregrine Lunar Lander, Payload User’s Guide.
How to cite: Joulaud, M., Flahaut, J., Urbina, D., Madakashira, H. H., Ito, G., Biswas, J., and Sheridan, S.: Candidate landing sites and possible traverses at the South Pole of the Moon for the LUVMI-X rover, Europlanet Science Congress 2020, online, 21 September–9 Oct 2020, EPSC2020-619, https://doi.org/10.5194/epsc2020-619, 2020