
 ,
,- Laboratoire de Géologie de Lyon: Terre, Planètes, Environnements, Université Claude Bernard Lyon 1, Lyon, France (cedric.millot@ens-lyon.fr)
Introduction: The large amount of data from orbital imagery requires time-consuming analyses, especially for high-resolution products. On Mars, the High Resolution Imaging Science Experiment (HiRISE, McEwen et al., 2007) gathers several thousand images (McEwen et al., 2024). Automated algorithms are needed to extract data from such a large number of images. Small impact craters (with a diameter below 50 meters) are geological features that provide key information about the subsurface structure or the landscape changes through time. For now, a global mapping effort has been completed for craters larger than 1 km (Robbins et al., 2012). The challenge to tackle is now to pursue this task for lower diameters by using automated algorithms.
Methods: We trained the well-known You Only Look Once (YOLO, Redmon et al., 2016) v11 algorithm to segment small craters over HiRISE images (McEwen et al., 2007). YOLO's architecture is a Convolutional Neural Network (CNN, e.g. Ronneberger et al., 2015) used for the segmentation and classification of images, and has been successfully applied on Martian data (e.g. Benedix et al., 2020). We used an exhaustive count (Millot et al., 2024) of 83820 craters located in Candor Chasma, with diameters ranging from ~2 m to 270 m over the HiRISE image ESP_024255_1750, for the training of the algorithm. We cut the original HiRISE image and the target file into tiles of 256 by 256 pixels. Then, we split the resulting dataset into training, validation, and test sets following a 70%, 20%, and 10% ratio. We trained the YOLO medium algorithm ('yolo11m-seg') over 100 epochs, following the set of hyperparameters defined in Table 1. Finally, we tested the algorithm over a new HiRISE image, ESP_026477_1615, located in the magmatic terrains of Tyrrhenus Mons.
|
Parameters |
Value |
|
Batch size |
16 |
|
Epochs |
100 |
|
Image size |
640 pixels |
|
Initial learning rate |
0.02 |
|
Final learning rate |
0.01 |
Table 1: The set of hyperparameters for the ‘yolo11m-seg’ algorithm training.
Results and perspectives: The training process reached a mean Average Precision (mAP) of around mAP = 65% for the best models we trained. Precision P and recall R were respectively P = 68% and R = 58% for the best models. Most of the medium-sized craters, between 5 and 20 m in diameter, were segmented correctly by the algorithm after the training. Improvements can still be made on small (< 5 m) and large (over > 50 m) crater detections and segmentations. Figure 1 displays some examples of four tiles from the HiRISE image ESP_026477_1615. Panel 1a shows that the largest craters from a cluster are correctly mapped (blue masks), while some of the smallest in diameter are missing. Panel 1b presents one accurate result over a fresh and large crater (top left corner of the tile) along with a wrong detection (lowest part of the tile). Subplot 1c highlights the two detections of a large crater and a small crater set on a lava terrain. Finally, panel 1d underlines that one large crater (more than 100 m in diameter) is not mapped by the algorithm. Results are still variable but remain encouraging, as crater mapping has been made over a new HiRISE image, which has not been involved in the training process.
The potential to automatically map the small-sized craters (< 1 km) on planets with an atmosphere will bring new insights into the active crater modification processes (erosion or aeolian infilling).
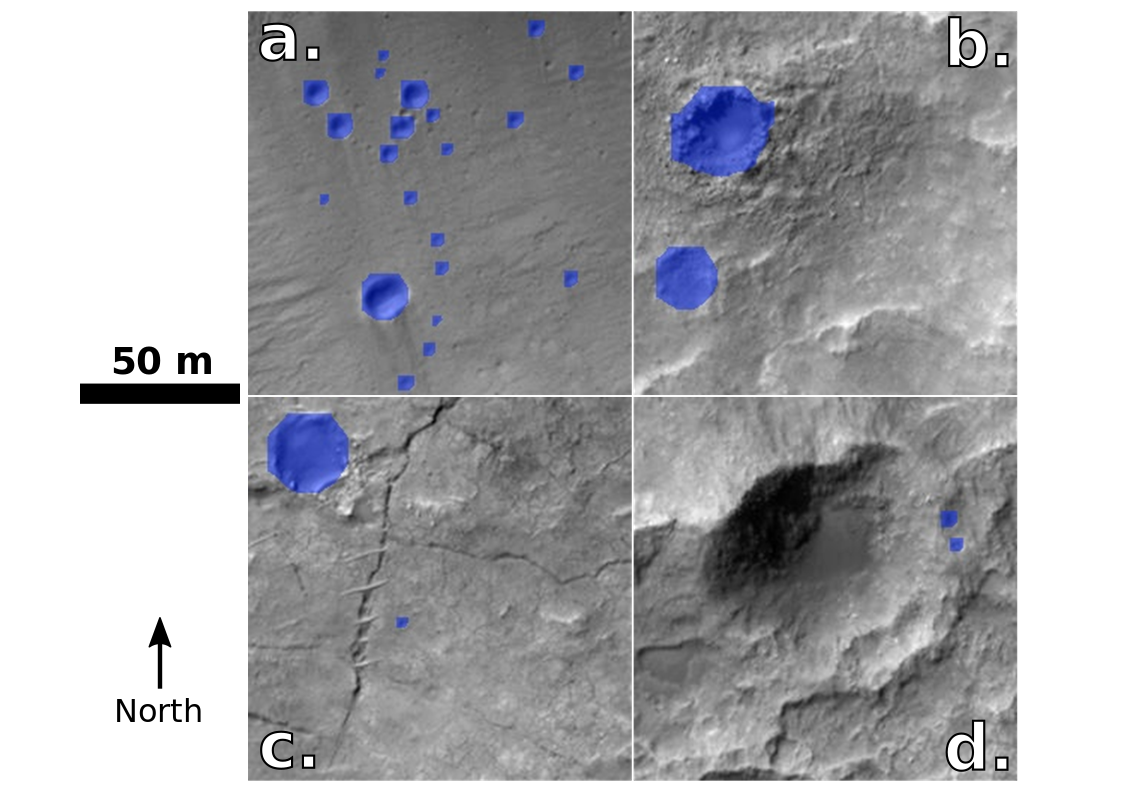
Figure 1: Four tiles from the HiRISE image ESP_026477_1615 summarizing predictions (blue masks) from our trained YOLO model.
References
- K. Benedix, et al., “Deriving surface ages on Mars using automated crater counting.” Earth and Space Science, 7, e2019EA001005. https://doi.org/ 10.1029/2019EA001005. 2020.
- A McEwen, et al., “Mars reconnaissance orbiter's high resolution imaging science experiment (HiRISE).”Journal of Geophysical Research: Planets 112.E5 (2007).
- A.S. McEwen, et al., “The high-resolution imaging science experiment (HiRISE) in the MRO extended science phases (2009–2023)”, Icarus, 419, https://doi.org/10.1016/j.icarus.2023.115795, 2024.
- Millot, “Dataset from Millot et al., 2024”. Zenodo. doi: 10.5281/zenodo.14035904. 2024.
- Redmon, et al., “You Only Look Once: Unified, Real-Time Object Detection,” IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, pp. 779-788, doi: 10.1109/CVPR.2016.91, 2016.
- J. Robbins, & B.M. Hynek, “A new global database of mars impact craters > 1 km: 1. database creation, properties, and parameters”. Journal of Geophysical Research: Planets, 117 (E5). Retrieved from https://agupubs.onlinelibrary.wiley.com/doi/abs/10.1029/2011JE003966 doi:https://doi.org/10.1029/2011JE003966, 2012a.
- Ronneberger, et al., “U-net: Convolutional networks for biomedical image segmentation.” Medical image computing and computer-assisted intervention–MICCAI 2015: 18th international conference, Munich, Germany, October 5-9, 2015, proceedings, part III 18. Springer international publishing, 2015.
How to cite: Millot, C., Quantin-Nataf, C., and Volat, M.: Supervised Deep Learning for Mapping Small Craters on Mars, EPSC-DPS Joint Meeting 2025, Helsinki, Finland, 7–12 Sep 2025, EPSC-DPS2025-1547, https://doi.org/10.5194/epsc-dps2025-1547, 2025.