
 ,,
,,- Dartmouth College, Department of Earth Sciences, United States of America
Introduction:
Rovers have traversed over 100 kilometers of the Martian surface, assembling an expansive archive of over one million high-quality imagery of sedimentary features in diverse geologic settings.1 These images record fine sediment grains (0.5-2 mm in diameter) shaped by their billions of years of surface processes. Studying grain morphology offers insight into sediments’ origins and deposition, crucial to reconstruct regional climatic histories.2
Grain size and form indicate transport history and paleo-depositional environments, making them fundamental expressions of Mars’ climatic and hydrological evolution.3,4 While previous studies classify individual rock outcrops along the rovers’ traverses, broader questions about sedimentary grain variability across the Martian surface remain unanswered. This project addresses that gap by applying deep learning to quantify grain morphometry across rover imagery, enabling us to extrapolate a novel large-scale sedimentary analysis.
Data & Methods:
We assess imagery from NASA’s Spirit, Opportunity, Curiosity, and Perseverance rovers which are each equipped with optical cameras meant for geologic investigation. The rovers have collectively returned across more than 13,000 sols that capture a wide range of morphological features including volcanic, aeolian, lacustrine, deltaic, and fluvial systems.3,4 We classified grains using five widely-accepted metrics in Martian sedimentology: grain size distribution (D50, D84), axial ratio (Ra), circularity (IR), convexity (C), and roundness (P).4,5,6,7 These characteristics allow us to infer transport histories, and determine environments—alluvial fan/fluvial, deltaic, lacustrine, aeolian, and crater floor/wall deposits.
To automate grain form identification, we use a deep learning image segmentation model and high-quality unobstructed images from NASA’s Planetary Data Sciences Imaging node.8 Our work builds on the precedent of other domain-adapted deep learning models on Mars9 but shifts the focus to finer geologic units. We adapted the Segment Anything Model (SAM2), a vision transformer by Meta AI Research that uses global self-attention to contextualize local features and perform general-purpose segmentation.10 Unlike conventional convolutional neural networks, SAM2 is adept in complex, cluttered scenes, ideal for Martian surface imagery, and pixel-level segmentation is possible without retraining the model extensively. This circumvents the need for densely labeled training data, the likes of which do not exist for Martian sediments, and helps enable flexible, semi-supervised or even unsupervised workflows that can still produce geologically meaningful outputs. This significantly lowers the barrier to entry for planetary-scale sediment analysis and allows us to scale insights without exhaustive manual input.
We further adapted SAM2 using a transfer learning strategy, drawing upon Segment Every Grain, an open-source Earth-based framework that applies SAM2 to cobble-sized sediment segmentation.11 We retrain the model on a subset of annotated rover imagery, enabling us to specialize the model according to the Martian surface. Reliably detected grains’ morphometric features can then be recorded, and linked to metadata about rover location and image characteristics to populate datasets for spatial and temporal analyses.
Results & Discussion:
By automating grain-scale segmentation, we anticipate a large-volume dataset that allows us to compare sediment characteristics across diverse Martian terrains and enables large-scale sediment provenance and transport studies that are otherwise infeasible via manual analysis. Our preliminary results suggest that SAM2 is effective in the identification of grains: the figure below demonstrates an image of Martian sediment and the identification of grains within the image that are then classified according to morphometric qualities.
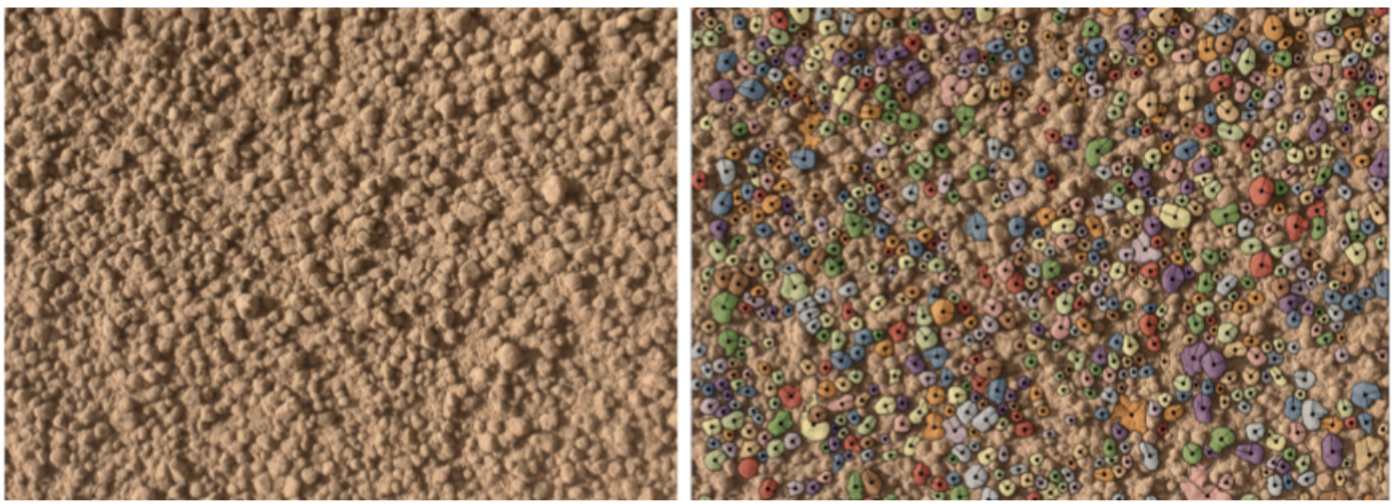
Figure 1: Left demonstrates the image before segmentation, showing a dense cluster of pebble-sized clasts. The right panel demonstrates several correctly-identified grains from which morphometric quantities were extracted using SAM2.
Anticipated results include a novel geospatial distribution of styles of grain processing and their correlations to inferred depositional systems. This opens new frontiers for regional climatic reconstructions in a new light. Beyond Mars, this work contributes broadly to planetary science, sedimentology, and machine vision. Such automated grain-scale analysis could be extended to other planetary bodies. Likewise, the methodology could help advance Earth-based geoscience, including fluvial transport modeling, coastal erosion studies, and landslide prediction.3 All code, models, and processed datasets from this project will be made open-source to support future research and maximize scientific return from planetary imagery, encouraging community-driven development.
References:
[1] Rice, M. S., et al. (2017), Geologic overview of the Mars Science Laboratory rover mission at the Kimberley, Gale crater, Mars, J. Geophys. Res. Planets, 122, 2–20.
[2] Wadell, H. (1932). Volume, Shape, and Roundness of Rock Particles. The Journal of Geology, 40(5), 443–451.
[3] Attal, M., and J. Lavé (2009), Pebble abrasion during fluvial transport: Experimental results and implications for the evolution of the sediment load along rivers, J. Geophys. Res., 114, F04023.
[4] Szabó, T., Domokos, G., Grotzinger, J., et al (2015), Reconstructing the transport history of pebbles on Mars. Nat Commun 6, 8366.
[5] Yingst, R. A., et al. (2013), Characteristics of pebble- and cobble-sized clasts along the Curiosity rover traverse from Bradbury Landing to Rocknest, J. Geophys. Res. Planets, 118, 2361–2380.
[6] Palucis, M. C., W. E. Dietrich, A. G. Hayes, R. M. E. Williams, S. Gupta, N. Mangold, H. Newsom, C. Hardgrove, F. Calef III, and D. Y. Sumner (2014), The origin and evolution of the Peace Vallis fan system that drains to the Curiosity landing area, Gale Crater, Mars, J. Geophys. Res. Planets, 119, 705–728.
[7] Gupta, S., & Farley, K. (2021). Mars 2020 Mission: Geology of Jezero crater and Outside Jezero and Sampling on a notional Mission Traverse Mars 2020 Mission Objectives, 1–30.
[8] NASA JPL and USGS. (2025). Rover Data Archives. PDS Cartography and Imaging Sciences Node.
[9] Panambur, T., and M. Parente (2025). Enhancing Martian Terrain Recognition with Deep Constrained Clustering, arXiv e-prints, 2503.17633.
[10] Meta AI. (2023). SegmentAnything Model (SAM) 2 [Computer software].
[11] Sylvester, Z. (2024). segmenteverygrain (Version 0.2.1) [Computer software].
How to cite: Gandhi, S., Hayes, A., Krishna, M., Rogers, E., and Koeppel, A.: From Imagery to Insight: Machine Learning for Grain-Scale Sediment Analysis on Mars, EPSC-DPS Joint Meeting 2025, Helsinki, Finland, 7–12 Sep 2025, EPSC-DPS2025-1752, https://doi.org/10.5194/epsc-dps2025-1752, 2025.