
 1,1,2,
1,1,2,- 1Team Tumbleweed, Delft, Netherlands (james@teamtumbleweed.eu)
- 2Department of Physics and Astronomy, Aarhus University, Aarhus, Denmark, (phys@au.dk)
The Tumbleweed mission is novel, and its scientific value has been validated through years of research identifying knowledge gaps that can be addressed by the mission’s broad in-situ exploration capabilities on Mars [1]. The swarm-based mission of 5-meter-diameter spheroidal wind-driven tumbling rovers enables the collection of large spatio-temporal datasets covering large swaths of the planet, finally providing a terminal network of distributed sensors in the stationary phase of the mission [2]. This mission will bridge the gap between low-resolution orbiters and physically constrained wheeled rovers with a cost-efficient alternative.
The needs of planetary scientists, and the initial mission concept, have been verified over the last few years, with science and instrument requirements clearly stated for all relevant science cases ranging from mapping subsurface water ice with a miniaturised neutron spectrometer (currently in development) to prospecting surface geology with our suite of multispectral cameras [3].
At this juncture, the technical feasibility of the Tumbleweed rover needs to be proven, through demonstration of scientific data collection in static and dynamic configurations. Testing is essential to characterise the behaviour of the Tumbleweed rover in different terrain and conditions. This constitutes Phase A feasibility studies, wherein testing is intended to raise the Technology Readiness Level (TRL) from 3-4 to 5-6.
The Science Testbed - a platform for research
To address this requirement, we constructed the Science Testbed: a scaled-down prototype of the Tumbleweed rover [4]. This development enables us to characterise the dynamic environments and noise that affect payloads on board a tumbling platform. The first iteration of the testbed is shown in Figure 1 and was tested in April 2025 in the ENCI Maastricht quarry, with a suite of simple Commercial off-the-shelf (COTS) sensors. Notably, the design of this half-scale terrestrial prototype enables decoupling the rolling outer structure from the stabilised inner structure for effective data collection.
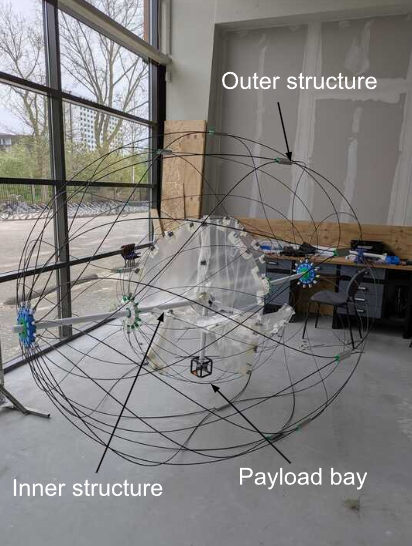
Figure 1: First iteration of the Science Testbed during development in the Delft (Netherlands) workshop.
Aarhus Planetary Environment Facility
In July 2025, the second iteration of the Science Testbed was tested in the AU Planetary Environment Facility in Aarhus (Denmark), wherein the ‘dirty’ wind tunnel can replicate Martian surface conditions. The scaled-down spheroidal Tumbleweed rover was tested with a variety of controlled experiments studying rover mobility, aerodynamic behavior, dust transport and accumulation, locomotion efficiency and payload stability. Thus informing additional constraints for an internally developed physics-based simulation tool. This tool will enable advanced assessment of various mission design options with respect to scientific return, payload performance, locomotion and navigation risk, as well as operational feasibility.
The tests in the Planetary Environment Facility were conducted according to the overarching objective of extracting meaningful information about the behavior and performance of the rover under Martian conditions. This can be decomposed into the following sub-objectives:
- Analyse the fluid-structure interactions of the rover during Force-Balance tests varying wind speed and orientations of the rover
- Analyse the impact of tumbling motion and varying environmental conditions on payload performance and instrument operations
- Examine the impact of varying regolith roughness on rover movement and payload performance
- Determine the threshold wind velocity that initiates rolling of the rover
- Understand dust mobilisation around the rover
- Understand dust accumulation and electric field signatures during a traverse.
- Understand the uncertainty in down-scaling the rover with respect to payload stability, rover dynamics and locomotion efficiency
The experiments were conducted in two parts - static and dynamic tests.
Static Tests
Force-Balance tests were performed to measure lift, drag, moment, and torque acting on the rover. Two variables were changed independently: the initial orientation of the rover and wind speed. The other tests were performed on our payload. COTS sensors were placed on the cryogenic cooling plate, reaching some of the coldest temperatures experienced on Mars (around -143 degrees Celsius), confirming the robustness of our atmospheric instrumentation such as pressure, temperature, soil permittivity and humidity sensors.
Dynamic Tests
The rover was propelled in a controlled manner from an initial stationary position to then traverse a predetermined distance along the chamber. The dynamic tests had miniaturised sensors onboard, notably a microphone, a camera, and a wind sensor to test their performance in varying terrain and atmospheric conditions.
Locomotion-based testing involved varying the underlying regolith to different surface roughnesses in order to understand the impact of regolith on the mode of transportation the rover takes (saltation or traction). Moreover, by varying the wind speed, the threshold wind speeds for rolling were determined for different surfaces. This was done by changing plates with glued sand grains of specific sizes. Larger morphological features such as sand ripples or dunes were also simulated.
Accelerated testing of the dust environment on Mars was done by injecting a high concentration of Martian simulant dust through the wind tunnel. The size of the dust particles varied from 1-10 micrometers and the gas density was kept constant. The accumulation of dust was measured by sticky traps being weighed after a traverse. These sticky traps were placed at various spots on the rover, including the payload bay. Possible extensions could include measurements of triboelectrically charged dust at high wind speeds, using onboard electric field sensors. Measurement of electric fields in dust devils and dust storms is crucial for understanding dust adhesion in future surface-based missions.
These findings advance the development of passively propelled and low‑cost robotic systems for distributed sensing in remote environments, while also providing critical insights into the dynamics of tumbling, wind‑driven platforms and the operational conditions their payloads encounter.
Future testing
Further field campaigns are planned, including a test in the Atacama Desert in November 2025 and a follow-up in Svalbard in early 2026 to validate Earth-based use-cases, particularly in atmospheric and radiation sciences.
Acknowledgements
We gratefully acknowledge the Europlanet Transnational Access (TA) scheme and the funding it provided, which made these tests possible. Our sincere thanks to the AU Planetary Environment Facility for their support.
References
[1] https://doi.org/10.5194/egusphere-egu24-20149, 2024.
[2] Renoldner et al, IAC 2023.
[3] https://doi.org/10.5194/epsc2024-1103, 2024.
[4] https://doi.org/10.5194/egusphere-egu25-18773, 2025.
How to cite: Kingsnorth, J., de Pinto Balsemão, M., Shanbhag, A., Pikulić, L., Merrison, J., Iversen, J., Moisuc, C., Peterson, M., and Rothenbuchner, J.: Preliminary Feasibility Assessment of the Tumbleweed Rover Platform and Mission using the AU Planetary Environment Facility, EPSC-DPS Joint Meeting 2025, Helsinki, Finland, 7–12 Sep 2025, EPSC-DPS2025-1775, https://doi.org/10.5194/epsc-dps2025-1775, 2025.