
 ,,
,,- Team Tumbleweed, Delft, Netherlands (james@teamtumbleweed.eu)
The Tumbleweed Mission proposes a cost‑effective swarm of over 90 wind‑driven spheroidal rovers to acquire extensive spatio‑temporal datasets across the Martian surface [1]. Built from modular, mass‑producible components and off‑the‑shelf parts, these 5-meter-major-diameter box‑kite rovers leverage wind for locomotion, reducing mission cost and complexity. Our previous simulations indicate that a randomly deployed swarm could average more than 400 km of travel per individual rover within 100 sols, despite individual unit losses due to terrain obstacles or system faults [2]. Thus, this mission will significantly enhance our understanding of Mars, facilitating future human exploration and settlement.
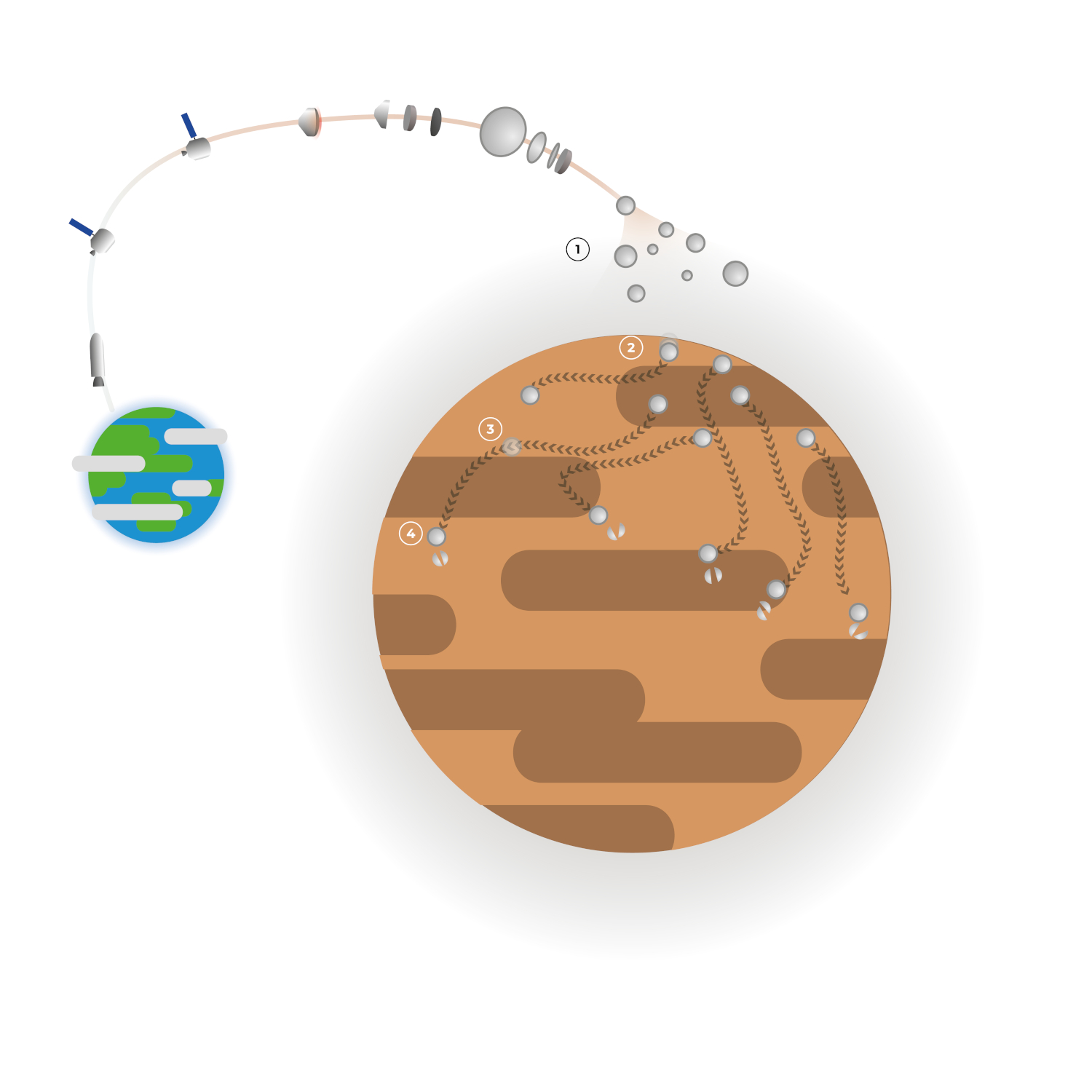
Figure 1 - Proposed Mission Architecture: mid-air deployment (1), landing (2), rolling towards the equator (3) and stationary phase (4).
Given the unconventional mission architecture (figure 1) and unprecedented capabilities of the platform, the Tumbleweed rover embodies a technology‐driven paradigm for in situ exploration, decoupling sensor development from predefined science objectives. In order to quantify and maximize the anticipated science return of the mission, we have implemented an optimization framework balancing scientific utility per instrument against SWaP (Size, Weight, and Power) constraints. Through this payload pre-selection framework, we have identified a high‑TRL instrument suite [3], comprising of atmospheric sensors (pressure, temperature, relative humidity, electric field, dust), a triaxial fluxgate magnetometer, a hand‑lens imager, a multispectral stereoscopic camera, radiation and neutron spectrometers, and a soil permittivity sensor.
Exploring the synergies amongst our pre-selected list of instruments, we arrived at the opportunity to use multispectral cameras, radiation and neutron spectrometers, and a triaxial fluxgate magnetometer to characterise Martian Habitability across the traversed paths of individual rovers.
Herein, Martian Habitability not only refers to scouting before the first human footsteps on Mars [4] but also to studying the Martian radiation environment [5] as well as its impact on potential biosignatures [6]. As such, we define areas of interest for the assessment of present-day Martian Habitability as the intersection of (a) low radiation exposure, (b) local availability of water/H‑bearing materials, and (c) magnetospheric shielding. These areas could constitute niches conducive for preservation of potential biosignatures. Current knowledge gaps relate to:
- Spatio-temporal variation characteristics of ionizing radiation and its interaction with the atmosphere, regolith, and local magnetic fields;
- Abundance of carbon, water equivalent hydrogen (WEH), and other biologically important (CHNOPS) elements near the surface;
- Existence of discrete mini-magnetospheres capable of locally modulating the radiation environment by measurably deflecting incoming charged particles;
- Characterisation of environmental and topographical hazards.
All these knowledge gaps can be probed by a synergistic suite of instruments on-board a multi‑rover swarm of Tumbleweeds. For example, the neutron spectrometer shall continuously measure both fast and epithermal neutrons produced when Galactic Cosmic Rays (GCRs) and Solar Energetic Particles (SEPs) interact with the regolith, enabling high‐resolution WEH mapping along each rover’s path [7]. Neutron measurements will be complemented by continuous measurements of soil permittivity using patch electrodes-based sensors [8]. Meanwhile, the fluxgate magnetometer shall record vector magnetic fields at every stop and during locomotion, detecting localized magnetic anomalies that can act as mini‑magnetospheres [9].
Moreover, the multispectral stereoscopic camera will play a crucial role in hazard assessment and geological reconnaissance. By capturing high‑resolution stereo pairs across visible and near‑infrared bands, the camera shall generate digital elevation models to identify slopes, rock hazards, and dust‑accumulation zones—vital data for planning and selecting human landing sites. Spectral indices derived from the same imagery shall reveal mineralogical variations (iron‑oxide, clay, and sulfate signatures) that trace aqueous alteration processes, pinpointing locations where past water activity may have created habitable niches.
Fusing neutron spectrometer data with magnetic‑field measurements, we will generate spatio‑temporal maps of radiation dose rates, hydrogen content, and magnetic shielding strength. These integrated datasets pinpoint radiation “cold spots” co‑located with elevated WEH—locations where mini‑magnetospheric shielding and subsurface hydrogen may coincide. Such sites are prime candidates for astrobiological investigations and future human landing zones, offering potential water reservoirs and enhanced natural protection from ionizing particles.
Deployed as a distributed swarm, each Tumbleweed rover will continuously sample radiation flux, hydrogen abundance, magnetic anomalies, topography, and surface composition over hundreds of kilometers, collectively generating habitability maps that bridge the gap between orbital surveys and point measurements. This multi‑dimensional dataset will not only resolve small‑scale heterogeneities in Martian environmental conditions but also guide the selection of optimal sites for both astrobiological investigations and future human exploration.

Figure 2 – Pink Lady in the Negev Desert, credit to OEWF/AMADEE20.
Presently, development of scientific use-cases requires proof of feasibility on the Tumbleweed rover and simultaneously of individual instruments aboard it. Although several prototypes have been developed to some success (figure 2) [10], the ability of the Tumbleweed Rovers to produce environmental data both statically and dynamically must be proven – specifically on extreme environments and in Martian analogous experimental set ups.

Figure 3 - First iteration of the Science Testbed under development in the Delft (Netherlands) workshop.
We have recently developed a reusable platform that enables the proposed suite of instruments to be tested: the “Tumbleweed Science Testbed” (figure 3) [11]. This is a sub-scale rover prototype with a major diameter of 2.7 meters, equipped with a 1U cuboid payload bay which provides modular interfaces to a variety of COTS and bespoke payloads. In addition to the payload bay, modestly sized sensors can also be incorporated on the structure, providing opportunities for contact-based measurements and vertical profiling relevant for atmospheric sciences.
The next phase in our technological development roadmap involves testing an iteration of the Tumbleweed Science Testbed in a ‘dirty’ wind tunnel able to reproduce the conditions found at the surface of Mars. Under this controlled environment, we aim to characterize the rolling dynamics, wind and dust interaction, and locomotion of the rover extensively. These developments are envisioned to raise the Technology Readiness Level (TRL) of our platform towards levels 5 to 6. Additionally, planning for field trials in deserts and in polar environments is currently underway.
[1] - https://doi.org/10.5194/egusphere-egu24-20149
[2] – Renoldner, 2023.
[3] - https://doi.org/10.5194/epsc2024-1103
[4] - https://doi.org/10.5194/epsc2024-790
[5] - https://doi.org/10.5194/egusphere-egu25-19534
[6] – Shanbhag, 2023.
[7] - https://doi.org/10.1016/j.icarus.2021.114805.
[8] - Gscheidle, 2024.
[9] - Maxwell, 2023.
[10] - Rothenbuchner, 2022.
[11] - https://doi.org/10.5194/egusphere-egu25-18773
How to cite: Kingsnorth, J., de Pinto Balsemão, M., Shanbhag, A., Pikulić, L., Moisuc, C., Bounova, G., Peterson, M., and Rothenbuchner, J.: A Swarm of Wind-Driven Tumbleweed Rovers for in-situ Mapping of Radiation, Water‑Equivalent Hydrogen and Magnetic Fields on Mars, EPSC-DPS Joint Meeting 2025, Helsinki, Finland, 7–12 Sep 2025, EPSC-DPS2025-1779, https://doi.org/10.5194/epsc-dps2025-1779, 2025.