
 4,5,6
4,5,6- 1Depatrment of Physics, The Catholic University of America, Washington, DC, USA (pokorny@cua.edu)
- 2Astrophysics Science Division, NASA Goddard Space Flight Center, Greenbelt, MD, USA (petr.pokorny@nasa.gov)
- 3Center for Research and Exploration in Space Science and Technology, Baltimore, MD, USA
- 4Solar System Exploration Division, NASA Goddard Space Flight Center, Greenbelt, MD, USA
- 5Intuitive Machines, Phoenix, AZ, USA
- 6Earth, Planetary & Space Sciences, University of California, Los Angeles, CA, USA
Until recently, permanently shadowed regions (PSRs) on the Moon were devoid of high-resolution high-signal-to-noise imaging. ShadowCam, the NASA-funded instrument onboard the Korea Aerospace Research Institute (KARI) Korea Pathfinder Lunar Orbiter (KPLO) satellite brings 200x more sensitive images with 1.7 m per pixel resolution.
ShadowCam’s growing and publicly available dataset contains millions of previously unknown impact craters that provide important insight into various physical processes such as the impact gardening, volatile excavation, or mass wasting in lunar PSRs. In this presentation, we describe our crater detection techniques and the current state of our crater detection efforts on the ShadowCam image dataset.
With the advent of machine learning, we can now efficiently process the high-resolution lunar images. Machine learning crater detections have been successfully applied on numerous planetary bodies, e.g. the Moon [1,2,3], Mars [4,5], and Ceres [6,7]. In our work, we use the YOLOv8 (You-only-look-once) object detection framework designed to provide high speed and accuracy for detection of various objects in images [8]. To minimize the complexity of our object detection model, we limit to only one class: “crater”, where all other features on each image are considered a part of the background. The architecture of our neural network is based on the YOLOv8m model with 25.9 million parameters with the default resolution of our detection model of 512x512 pixels. The detection model was trained using 5240 impact craters from various LROC-NAC images. The training dataset of our model was enhanced by employing several image augmentations such as rotation, contrast and brightness variations provided by the albumentations library to increase the robustness of our crater detection algorithm (CDA).
The ShadowCam images used for crater detection were orthorectified and geolocated by the ShadowCam team. These images have various sizes reaching up to 100,000 pixels in the x or y dimension. To efficiently accommodate images of different sizes we slice each image into tiles with 50% overlap. To detect craters of various sizes, we use 6 different image slice sizes: 256x256, 512x512, 1024x1024, 2048x2048, 4096x4096, and 8192x8192 pixels, where all these slices are rescaled to 512x512 pixels before our CDA is applied. To remove duplicate detections, we apply the non-maximum suppression algorithm (NMS) with the Intersection over Union (IoU) metric, where the IoU threshold is set to 0.3. NMS ensures that only detections with the highest confidence values are kept, and the IoU threshold allows us to keep nested impact craters. Ultimately, the CDA results in geolocated bounding boxes and confidence values for each detected impact crater (Figure 1).
We deployed our ML-based CDA on 22,256 images from the PDS ShadowCam dataset, which corresponds to 2.2 TB of image data covering approximately 5.3 million km2 of the lunar surface. The processing time for the entire dataset was approximately 3000 GPU hours on a Nvidia A100 GPU. In this dataset, we find 1,013,440,231 impact craters larger than 16 meters in diameter (8 pixels or larger). The average detection time per crater is approximately 0.3 microseconds, which is 6 orders of magnitude faster than human crater detections [9]. The images in the ShadowCam dataset overlap spatially, and therefore many craters are detected multiple times at different times and illumination conditions.
We tested the performance of our ML-based CDA on a dataset of 50,000 craters selected from different ShadowCam images and vetted by four human researchers. We find that our CDA has a true positive detection rate of 98.2 and that 1.8% are false positive detections for craters with diameters between 16 meters and 4 km. Additionally, ~1% of impact craters are not detected by our CDA. Smaller craters are also detected by our CDA, but the detection confidence values are lower and the consensus of the true/false detection varies significantly between different researchers for these small craters. Larger craters (>1 km in diameter) are already contained in the Robbins 2019 global crater database [10] and are therefore not the target of our analysis.
Our detection method will be applied to all future ShadowCam images as well as higher level data products such as controlled mosaics. We will also improve the ability of our detection algorithm to perform better for: impact craters in low-SNR regions, degraded craters, and morphologically complex craters. We are also planning to conduct a large-scale impact crater detection vetting with the help of citizen scientists. Ultimately, we will train a lightweight version of our detection algorithm for real-time detection of impact craters on a wider range of devices (e.g., web browsers, etc.)
Acknowledgments: We thank the KPLO and ShadowCam operations and science teams for acquiring the ShadowCam dataset. ShadowCam PDS https://pds.shadowcam.asu.edu/ was used in this work. PP was supported by the NASA Planetary Science Division Research Program through the GSFC Planetary Geodesy ISFM and the award number 80GSFC24M0006.
|
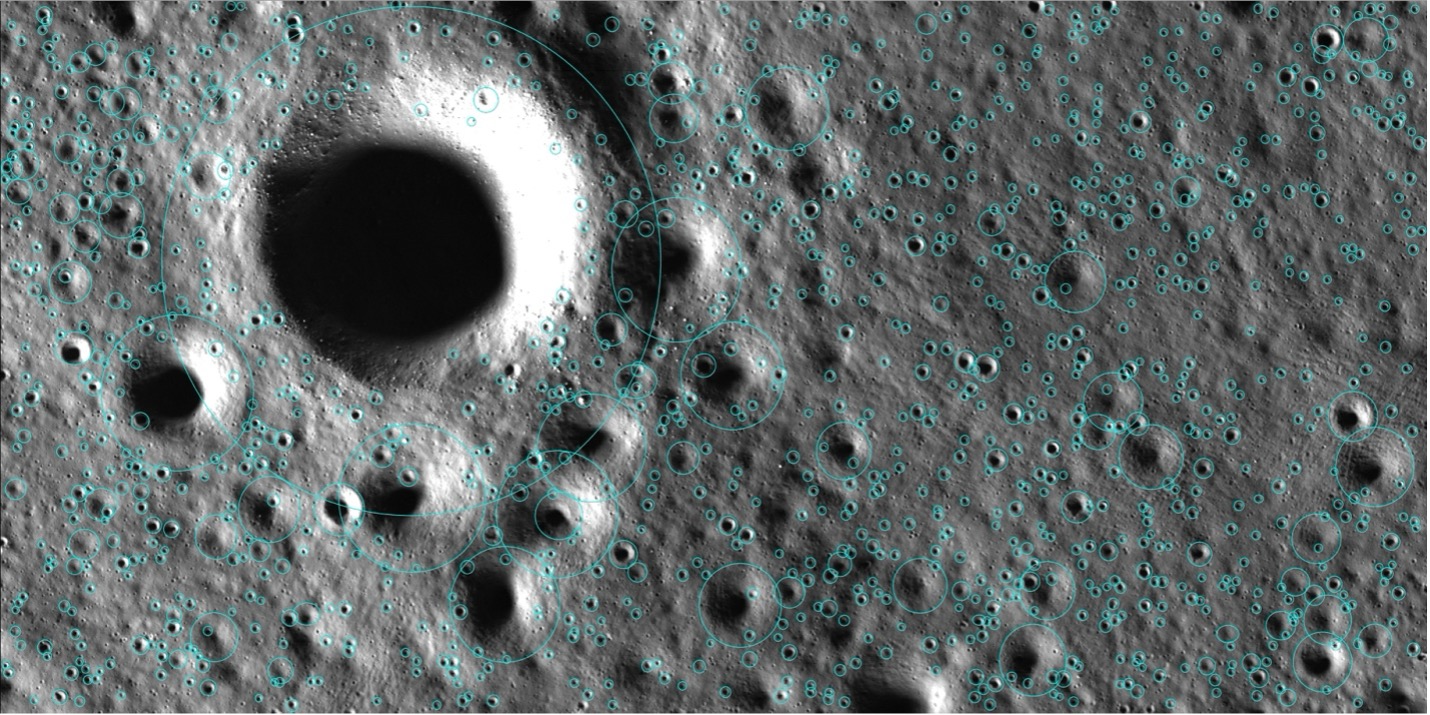
Figure 1. A ShadowCam full-resolution segment of the Faustini crater located at (x = 82.0 1.4 km, y = 5.0 0.7 km). This image contains 1164 impact craters with diameters from 16 m to 1.2 km. While our crater detection algorithm provides bounding boxes for each crater, we display each detection as an ellipse with the rotation angle equal to zero for better clarity. We find 98.2% of our detections are true positives, while 1.8% are false detections. Additionally, ~1% of craters remained undetected. Note, that craters with bounding boxes extending outside this image are not displayed but are still detected by our CDA. |
References: [1] Benedix G. K et al. (2020) Earth and Space Science, 7, 3, e01005, [2] Fairweather J. H et al. (2023) Earth and Space Science, 10, 7, e2023EA002865, [3] La Grassa R. et al. (2023) Remote Sensing, 15, 5 1171, [4] Lagain et al. (2021) Nature Communications, 12, 6352, [5] Lagain et al. (2022) Nature Communications, 13, 3782, [6] Latorre F. et al. (2023) Icarus, 394, 115434, [7] Herrera C. et al. (2024) Astronomy & Astrophysics, 688, A176, [8] Jocher G. et al. (2023) https://github.com/ultralytics/ultralytics, [9] Robbins S. J. et al. (2014) Icarus, 234, 109-131,[10] Robbins S. J. (2019) Journal of Geophysical Research: Planets, 124, 4 871-892
How to cite: Pokorny, P., Mazarico, E. M., Robinson, M. S., Mahanti, P., and Willaims, J.-P.: Machine Learning Driven Detection of 1 Billion+ Lunar Impact Craters in Permanently Shadowed Regions Using ShadowCam Data, EPSC-DPS Joint Meeting 2025, Helsinki, Finland, 7–12 Sep 2025, EPSC-DPS2025-469, https://doi.org/10.5194/epsc-dps2025-469, 2025.