Oral presentations and abstracts
This merged MITM12-13/TP13 session (co-sponsored by space agencies, ILEWG EuroMoonMars & IAF ITACCUS) will cover the preparation for future missions and sustainable outposts in deep space, Moon and Earth . It will be interdisciplinary , open to new stakeholders towards Moon and Mars Villages, and include subsessions:
1) Future instruments for deep space and lunar science
NASA, ESA, JAXA, ISRO, KARI and other Agencies have active Lunar science instruments programs and concepts. The Artemis and the Gateway programs have also generated a new drive to develop Lunar surface science instruments and technology demonstrations. Ahead of the human return to the Moon, commercial landers are expected to deliver science packages to the Lunar surface as early as 2021. Teams of Instruments already selected for flight as well as concept being developed are encouraged to submit abstracts and get feedback from the wider community.
2) Sustainable outposts for deep space, Moon and Mars.
We invite contributions on various uses of Moon, Mars and planetary outposts : science, technology, international cooperation, resource utilisation, economic development, human/robotic partnership, innovation, inspiration, education, entertainment, tourism, culture and societal benefits. We invite scientists, engineers, designers, architects, astronauts, research agencies, industries from (new) space and non-space to participate. We shall also discuss habitats projects for analogue simulations such as MDRS, HiSeas, LunAres, IgLuna, ESA Luna, MAMBA, EMMIHS, ILEWG EuroMoonMars.
A bifocal panoramic stereoscopic camera (BIPS) has been designed a realized as a terrestrial prototype. The core of the camera is a novel Bifocal Panoramic Lens (BPL) we designed and realized, which is able to carry out a panoramic field of 360° in azimuth, 100° in elevation (+60°/-40° with respect to the horizon) and, simultaneously, an enlargement of a part of the panoramic field. All of that using an unique image sensor and avoiding any moving part. BIPS consists of a twin couple of BPLs settled in an appropriate stereoscopic baseline. It allows the monitoring of the surrounding environment in stereoscopic (3D) mode and, simultaneously, to capture a higher resolution stereoscopic images to analyze scientific cases. If mounted on a planetary rover, BIPS merge engineering stereoscopic capabilities for autonomous driving with an optical stereoscopic channel for scientific purpose, making it a new paradigm in the planetary rovers' framework.
The operational aims include the identification of boulders, crevasses and other surfaces that can be obstacles for rover trafficability, in addition to the 3D reconstruction of exploration sites for improving situation awareness during both roving and human operations. On the other hand, the correct and detailed 3D reconstruction of exploring sites allows detailed measurements of many geological features such as: sedimentary structures (strata attitudes, geometry and thickness); fracturing networks (attitudes and persistence); folds and faults systems (orientation, vergence and displacement); veining systems (frequency, orientation and thickness); mounds, vents and ridges (slope and aspect); boulders (size frequency distribution). All these measurements are pivotal for the understanding of tectonic, sedimentologic, volcanic, erosive, fluid-rock interaction and impact processes on planetary surfaces.
In this paper we describe the optical characteristics of a BPL, the realized terrestrial BIPS, the stereoscopic calibration and some possible scientific cases within the lunar exploration framework.
How to cite: Pernechele, C., Cremonese, G., Fantinel, D., Lucchetti, A., Lessio, L., Massironi, M., Pajola, M., Paoletti, L., Pozzobon, R., Re, C., Saggin, B., Scaccabarozzi, D., Simioni, E., Abbattista, C., Banfi, E., Consolaro, L., Dionisio, C., Kuijpers, M., Mura, D., and Piantone, S. and the BIPS TEAM: Bifocal Panoramic Stereoscopic Camera for Lunar Exploration, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-557, https://doi.org/10.5194/epsc2020-557, 2020.
The Lunar Environment Monitoring Station (LEMS) is an instrument concept funded by NASA’s Development of Advanced Lunar Instrumentation (DALI) Program, and undergoing maturation at NASA's Goddard Space Flight Center. LEMS has been proposed to the NASA's recent call for Payloads and Research Investigations on the Surface of the Moon (PRISM).
LEMS is a compact, autonomous, self-sustaining and long-lasting instrument suite that enables in situ, continuous, long-term monitoring of the lunar exosphere and of the most relevant natural and manmade controlling processes (infall of interplanetary dust particles (IDP), influx of solar wind and magnetospheric particles, EUV irradiation, interior outgassing, disturbances by landers and human surface activities). LEMS can be delivered to the surface of the Moon by crewed or robotic missions. Once deployed (on a deck or directly on the surface), LEMS will operate day and night for a nominal duration of 2 years without requiring any additional support or resources from the carrying asset.
LEMS integrates a Mass Spectrometer, a Laser Retro-reflector Array, a Lunar Micrometeoroid Monitor, a Lunar Energetic Ion Analyzer, and a 3-axis Seismometer. These sensors will collect concurrent observations that will lead to a comprehensive, time-resolved, and geographically-localized characterization of the composition and dynamics of volatiles gases in the lunar exosphere as a response to variations in solar forcing, IDP flux, seismicity, and known manmade events. Furthermore, owing to its expected longevity, LEMS will also improve upon the success of the Apollo Passive Seismic Experiment (PSE) by providing a new generation of seismological measurements that will address unanswered questions by the PSEs. These questions include the size and state of the lunar core, homogeneity of the mantle, variation in crustal thickness, the mechanism for deep moonquakes, and the relationship between shallow seismicity and the current tectonic state of the lunar crust.
With its complementary and integrated multi-sensors and its autonomous concept of operation, LEMS is a science-enabling investigation that combines capabilities, in a single duplicable instrument package. The duplicative nature of the LEMS design enables a network of stations that focuses on exospheric and geophysical measurements at the Moon to become viable options. Finally, the self-sustaining architecture of LEMS provides a model design of future payloads that can take advantage of more commercial or scientific flight opportunities to the Moon while requiring no further support for operation from their carrying assets.
How to cite: Benna, M., Schmerr, N., Sarantos, M., Bailey, H., Gershman, D., Horanyi, M., Sun, X., and Szalay, J.: The Lunar Environment Monitoring Station (LEMS), Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-60, https://doi.org/10.5194/epsc2020-60, 2020.
1. Introduction
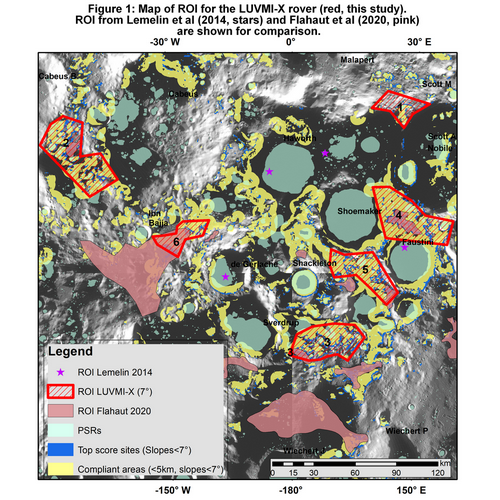
Lunar volatiles, such as water, are considered to be a crucial resource for In Situ Resource Utilization (ISRU) in using the Moon as an enabling platform for future space exploration. As water is most likely to be found in the form of ice at the lunar poles (temperature of stability in vacuum: 110K [1]), multiple missions target the South Pole cold traps [2]. With challenging conditions (rough topography, low illumination, low temperatures, and limited Earth visibility; [3] and references within), the South Pole comprises numerous PSR (Permanently Shadowed Regions) which are cold enough to capture and retain volatiles such as water ice (annual average temperatures of 40K [2]). Funded by the EU program Horizon 2020, Space Applications Services coordinates the LUVMI-X (LUnar Volatiles Mobile Instrument) project, where the company develops a robotic platform and international partners develop a dedicated payload suite [4], aimed at sampling and analyzing lunar volatiles in these polar regions. LUVMI-X is a commercial rover with modular interfaces to facilitate the integration of payloads from the community. The goal of this paper is to find suitable landing sites and study areas for this rover, that are both scientifically interesting and technically reachable [2,3].
2. Selection of criteria and data
Available remote sensing imagery for the lunar South Pole (Table 1) was downloaded from the PDS or corresponding instruments ’websites and added into a Geographic Information System (GIS). LUVMI-X scientific objectives and technical specifications were then translated into a list of criteria and computed in our GIS [3,4]. Using ArcGIS, reclassified data were overlaid with different weights to define and rank compliant areas which respect the established constraints (Table 1). Regions Of Interest (ROI) were finally identified by mapping out compliant areas > 80 km2 (i.e., areas allegedly large enough to hold a 10km-diameter landing ellipse. This arbitrary ellipse size is based on the technical abilities of current commercial landers).
3. Landing sites ranking and selection
Results of the GIS analysis (Figure 1) show six identified ROI (red) for the LUVMI-X mission, which are compared with previous ROI from the literature (Lemelin et al, 2014, stars [6]; Flahaut et al, 2019, pink [2]). First, none of the LUVMI-X ROI intersects with Lemelin’s landing sites because the latter are only in PSR; Lemelin's sites do not meet the technical specifications of the LUVMI-X rover (areas without illumination are not accessible for a solar-powered rover). However, parts of Flahaut’s ROI overlap with the LUVMI-X sites of this study. Flahaut’s largest ROI (Amundsen, Ibn Bajja) do not or only partially overlay with LUVMI-X ROI as Flahaut’s study only considers surface water ice (with a temperature of 110K maximum). This study is intended for rovers unable to drill, which is not the case for LUVMI-X (drilling is possible down to 20cm).
The identified ROI are further ranked based on areas and statistics on Sun and Earth visibilities, temperatures, and H signatures. ROI 1 has the best mean Sun and Earth visibilities, but its amount of non-compliant pixels and the temperature are too high. Furthermore, its area is too restricted to hold a perfectly circular ellipse of 10 km, which is also true for ROI 6. ROI 2 and 3 are discarded as they contain high percentages of non-compliant pixels. H signatures from Lunar Exploration Neutron Detector (LEND) and water ice signatures from Moon Mineralogy Mapper (M3) [7] of ROI 4 and 5 were then compared. ROI 4 seems to present more evidence of surface water ice, which is a strategic asset in case LUVMI-X encounters drilling issues. This ROI presents the highest score in H signatures (LPNS, LEND) and the lowest temperatures while comprising the best site selected by Flahaut et al [2].
4. Perspectives for LUVMI-X
The requirements from some CLPS landers include slopes < 10°, which is larger than used in our initial study [8]. Future work includes revision of our ROI with an eventually relaxed set of parameters, and selection of 1-3 test sites for establishing traverses based on the mission’s initial scenario.
Traverses will be established by listing different specifications based on LUVMI-X concept of operations and scientific objectives, in order to identify “waypoints” (stops along the traverse). High resolution mosaics from the LROC’s Narrow Angle Camera (resolution of 1m/px) and LOLA 20m/px DEM will be used to map potential hazards and check PSR accessibility. The established waypoints should then be linked either by minimizing the used energy or maximizing Sun and/or Earth visibilities and will be used as an input to parametric and thermal models of the rover.
5. References
[1] Paige D. et al. (2010). Science, 330, 479-480.
[2] Crawford J. et al. (2020). Lunar Resources.
[3] Flahaut J. et al. (2020). Planetary and Space Science, 104750.
[4] Gancet J. et al. (2019). LUVMI and LUXMI-X Concept and extension. In the proc. of ESA ASTRA Symposium.
[5] Mazarico E. et al. (2011). Icarus, 211.
[6] Lemelin et al. (2014). Planetary and Space Science, 101.
[7] Li S. et al. (2018). Proc. Natl. Acad. Sci. 115 (36).
[8] Astrobotic. (2020). Peregrine Lunar Lander, Payload User’s Guide.
How to cite: Joulaud, M., Flahaut, J., Urbina, D., Madakashira, H. H., Ito, G., Biswas, J., and Sheridan, S.: Candidate landing sites and possible traverses at the South Pole of the Moon for the LUVMI-X rover, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-619, https://doi.org/10.5194/epsc2020-619, 2020.
Introduction
With the confirmation of water ice in the lunar polar regions [1], the Moon has recently come into the focus of attention of international space agencies again. Volatiles, specifically water and hydrogen, are important resources both for life support and for potential applications as fuels and propellants for spacecraft. In-situ resource utilization (ISRU) of volatiles could significantly reduce the costs of a sustained presence on the Moon and could be beneficial for the future human deep space exploration of the solar system [2]. The detection of volatiles is therefore an important scientific goal for future robotic missions to the Moon.
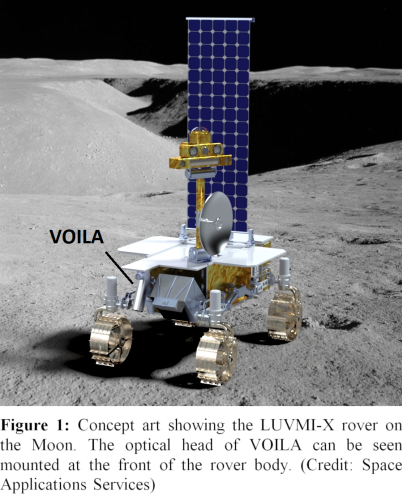
The LUVMI-X project (Lunar Volatiles Mobile Instrumentation – Extended) is developing an initial system design as well as payload and mobility breadboards for the detection of volatiles in the lunar polar region on a small, lightweight rover [3]. The LUVMI-X rover is shown in Figure 1. One proposed scientific payload is VOILA (Volatiles Identification by Laser Ablation), which is jointly developed by OHB System AG (OHB), Laser Zentrum Hannover (LZH), and the German Aerospace Center’s Institute of Optical Sensor Systems (DLR-OS). VOILA will use laser-induced breakdown spectroscopy (LIBS) to analyze the elemental composition of the lunar surface, with a special focus on detecting and quantifying hydrogen and oxygen as indicators for water.
LIBS is a versatile technique that requires only optical access to its target [4]. A LIBS spectrum is obtained within seconds, making it well-suited for quick analyses of multiple targets in proximity to the rover. LIBS was first used in space by the ChemCam instrument on board NASA’s Curiosity rover on Mars [5, 6]. The first LIBS instrument on the Moon was supposed to operate on board the Pragyan rover of India’s Chandrayaan-2 mission [7]. However, the Chandrayaan-2 lander failed a soft landing in September 2019.
Here, we present a summary of the VOILA instrument design and its intended capabilities for volatiles detection at the lunar south pole.
Instrument Design
With an expected mass of about 3 kg, VOILA is designed to be more lightweight than the ChemCam instrument, but heavier and slightly more complex than the LIBS instrument designed for the Chandrayaan-2 mission. It will include an optical head with a focusing mechanism designed for working distances between 30 cm and 50 cm, which allows for compensation of uneven terrain or different rover configurations. The optical head is mounted at the front of the rover body and can rotate horizontally to select multiple targets of interest at each rover location.
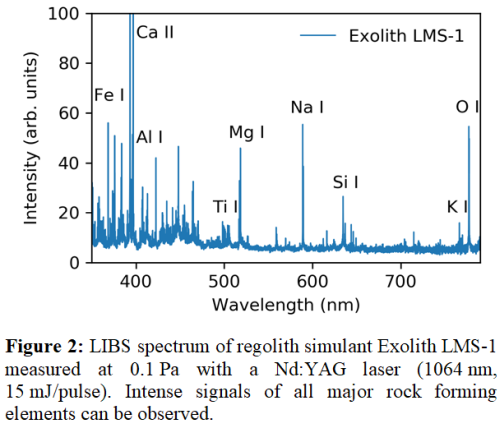
VOILA uses an actively Q-switched pulsed Yb:YAG laser developed by LZH with a pulse energy of at least 15 mJ at a wavelength of 1030 nm to ablate sample material, generating a laser-induced plasma that can be spectrally analyzed. The VOILA spectrometer will have a wavelength range from 350 nm to 790 nm at a spectral resolution of about 0.5 nm, thereby covering atomic and ionic emission lines of the major rock forming elements (O, Si, Al, Fe, Mg, Ca, Na, K, Ti) and of hydrogen.
LIBS measurements with VOILA are intended for the analysis of the topmost lunar surface layers. Simple depth profiling within millimeters could be achieved by repeated ablation of the same location on the surface. A single shot is expected to produce a crater of several millimeters depth due to the force of the outgoing shockwave in the regolith.
Laboratory Studies
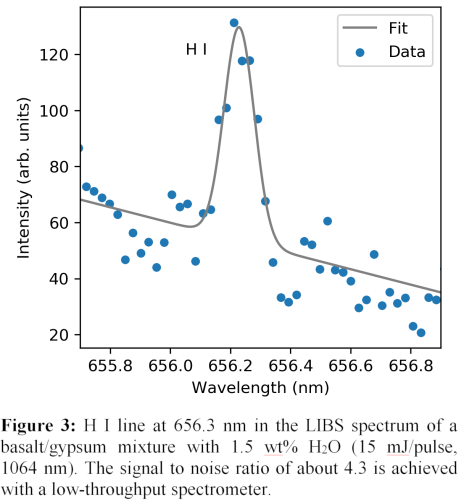
Preliminary LIBS studies in near-vacuum (0.1 Pa of air) were made with the high-resolution LIBS setup at DLR-OS to determine the VOILA instrument requirements. Figure 2 shows a LIBS spectrum of lunar regolith simulant Exolith LMS-1 in which all major rock forming elements could be observed within 350 nm to 790 nm. A laser energy of 15 mJ/pulse was found to produce a very intense plasma when focused to a spot of 300 µm diameter. For a basalt/gypsum mixture with a water concentration of about 1.5 wt%, the H I line at 656.3 nm was successfully detected, see Figure 3. The signal to noise ratio is about 4.3 for this line, indicating that even lower concentrations can be detected. Furthermore, the high-resolution echelle spectrometer used for the measurements has a low throughput that will be exceeded by the VOILA instrument itself.
Conclusion
VOILA is a new LIBS instrument for the detection of volatiles at the lunar south pole. Initial experiments show that LIBS can be employed at low pressures and that clear signals of all major rock-forming elements and of hydrogen can be obtained in the specified spectral range of VOILA. The pulse energy of VOILA is at least 15 mJ, which is achievable by the laser prototype developed by LZH. The successful detection of hydrogen is promising, but the instrument should also be qualified with measurements of real water ice at low concentrations. Future studies should also investigate whether water ice can be distinguished from other hydrogen and oxygen sources. New results obtained with the VOILA demonstration setup developed by OHB, LZH and DLR will be presented at the conference.
Acknowledgments
This research was funded by the European Union’s Horizon 2020 research and innovation program under grant agreement No. 822018.
References
[1] Li S. et al. (2018) PNAS, 36, 8907–8912.
[2] Anand M. et al. (2012) Planet. Space Sci., 74, 42–48.
[3] Gancet J. et al. (2019) ASTRA 2019.
[4] Knight A. K. et al. (2000) Appl. Spectrosc., 54, 331–340.
[5] Maurice S. et al. (2012) Space Sci. Rev., 170, 95–166.
[6] Wiens R. C. et al. (2012) Space Sci. Rev., 170, 167–227.
[7] Laxmiprasad A. S. et al. (2013) Adv. Space Res., 52, 332–341.
[8] Lasue J. et al. (2012) J. Geophys. Res., 117, E1.
How to cite: Vogt, D., Schröder, S., Hübers, H.-W., Richter, L., Deiml, M., Glier, M., Weßels, P., and Neumann, J.: VOILA on LUVMI-X: Volatiles Detection in the Lunar Polar Region with Laser-Induced Breakdown Spectroscopy, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-780, https://doi.org/10.5194/epsc2020-780, 2020.
The presence of ‘water’ (H-related defects), F, Cl and other volatiles in mare basalts and associated lunar volcanic glasses implies that lunar magmas were variably volatile-bearing[1]. Mineral-melt partition coefficients for each species can, in theory, be used to calculate volatile contents of lunar mantle source regions for these magmas. However, available partitioning data is largely based on studies in model terrestrial systems. Aside from differences in composition, the lunar mantle likely had an oxygen fugacity (fO2) at least 2 log units lower than the Earth’s upper mantle[3] and was either at or near Fe-saturation[1]. fO2 can have a fundamental influence on ‘water’ speciation in silicate melts, with H2 and C-H related defects stabilised under reducing conditions, at the expense of (OH)- defects which dominate in oxidising terrestrial conditions[4]. As such, partitioning data in model, reduced lunar systems is required to accurately interpret measured volatile contents in lunar materials.
We have developed a novel experimental design which allows us, for the first time, to constrain mineral-melt volatile partition coefficients under lunar mantle conditions. Experiments were performed at 2-3 GPa, 1350-1500°C, and at fO2 of IW-5 to IW+2 log units, in a system based on an average Apollo green glass[1]. Near-liquidus experiments were run to constrain olivine- and pyroxene-melt partition coefficients (Dmin/melt) for water, F and Cl, using EPMA and SIMS data. As shown in Fig. 1, values of Dmin/melt are comparable to those from experiments in more oxidised, terrestrial systems. F (and possibly Cl) incorporation in pyroxene and olivine is correlated with trivalent cation (Ti3+, Al3+, Cr3+) content, suggesting coupled substitution mechanisms[5], and is also dependent on the extent of melt polymerisation. However, fO2 has little discernible influence on partitioning behaviour. This is consistent with infrared and Raman spectra which show that (OH)- defects are the dominant mechanism for water incorporation in both silicate melt and coexisting mineral phases, with only a small proportion of water present as H2 defects in the most reduced, highest pressure samples. Higher pressures can stabilise a greater proportion of ‘water’ as H2, although this is unlikely to be an important mechanism for water storage in all but the deepest parts for the lunar mantle, as noted in previous thermodynamic models [6].

Partitioning data can be used to re-interpret volatile contents of lunar mantle source regions. A batch melting calculation with 4-8% partial melting of a lunar mantle cumulate of 50% olivine, 25% pigeonite and 25% orthopyroxene[7], based on volatile concentrations from olivine-hosted melt inclusions and lunar volcanic glass beads[7,8], implies a lunar mantle source region with 2-8 ppm F, 0.07-0.3 ppm Cl, and <15 ppm H2O. This represents 95% loss of both F and water, and 98% loss of Cl in the lunar mantle source relative to bulk silicate Earth (BSE). However, postulating a bulk lunar volatile content based on mare basalt mantle source regions is, of itself, misleading. During LMO solidification, volatiles will have been partitioned between crystallising phases (cumulates) and remaining melt, with the last dregs of magma likely solidifying as the hypothesised KREEP material. Any specific mantle source region is not necessarily representative of the bulk silicate Moon (BSE). To assess the effects of LMO solidification, we used partitioning datahere and [10] to simulate incremental solidification using a simplified crystallisation sequence[11], for up to 97% solidification. Resulting volatile contents, and volatile ratios in cumulates formed at each stage of LMO solidification are shown in fig. 2, based on an arbitrary starting volatile concentration in the LMO of 1000 ppm for each. For up to 50% solidification, volatile content of cumulates remains very low. This drives volatile enrichment in the LMO, and formation of volatile-enriched, pyroxene-rich cumulates during latter stages of solidification. Differences in partitioning result in fractionation in cumulates, such that F is highly enriched relative to Cl, and slightly enriched relative to H2O (Fig. 2B). At 97% solidification, water content of final cumulates is <60 ppm, and F just over 120 ppm. The final dregs of the LMO, as expected, are volatile enriched (>2000 ppm for each), but with no significant fractionation of volatiles (Fig 2C).

Batch melting calculations show that melt 1, formed by 10% melting of cumulate (Fig. 2A) contains 241 ppm H2O, 428 ppm F and 36 ppm Cl (again, based on 1000 ppm of each in the original LMO), with F/Cl =12, and F/H2O =1.8. A 10% melt 2 contains 382 ppm H2O, 870 ppm F and 109 ppm Cl, a F/Cl =8 and F/H2O =2.3. Therefore, partial melts of LMO cumulates partially retain the strong signatures of LMO solidification. Addition of a KREEP component will increase absolute volatile contents in lunar magmas, and dilute volatile ratios. However, our model predicts that pristine lunar mantle melts will have greatly elevated F/Cl, and high F/H2O ratios compared to the BSM and original LMO. Back-calculating LMO volatile contents for melt 2, using published lunar magma volatile contents[7,8], implies an original LMO with 38-88 ppm F, 16-26 ppm Cl, and 315-2441 ppm H2O. These values overlap those of the BSE, and require only minor additional fractionation of Cl relative to F. Modelling based on new partitioning data implies, therefore, that (1) LMO solidification had a significant effect on volatile distribution and fractionation within the lunar interior; (2) that signatures of LMO are retained in later mantle melts; (3) that the high lunar F/Cl[9] may reflect coupled effects of accretion of the Earth and later LMO solidification, and (3) that the Moon could be less volatile-depleted than previously estimated. These observations are consistent with a model where lunar volatiles are inherited from the early Earth.
[1]Saal et al.(2008)_Nature_454:192–196.
[2]Longhi (1992)_Geochim.Cosmochim.Acta_56:2235–2251.
[3]Rutherford and Papale (2009)_Geology_37:219–222.
[4]Kadik et al.(2006)_Geochem.Int._44:33–47.
[5]Dalou et al. (2012)_Contrib.Mineral.Petrol._163:L591–609.
[6]Hirschmann et al.(2012)_Earth.Planet.Sci.Lett._345:38–48.
[7]Zhang et al. (2019)_Earth.Planet.Sci.Lett._522:40–47.
[8]Chen et al.(2015)_Earth Planet.Sci.Lett._427:37–46.
[9]Hauri et al. (2015)_Earth Planet.Sci.Lett._409:252–264.
[10]Lin et al. (2019)_Geochemical Perspect.Lett._10:14–19.
[11]Rapp and Draper (2018)_Meteorit.Planet.Sci._53:1432–1455.
Acknowledgements: Work supported by the UK National Environmental Research Council NE/M000346/1 and IMF597/0516 (to Bromiley). Brooker was funded by the NERC Thematic Grant consortium NE/M000419/1
How to cite: Bromiley, G. D., Potts, N. J., and Brooker, R. A.: F, Cl and 'water' mineral-melt partitioning in a reduced, model lunar system: what does the ‘volatile’ content of lunar rocks tell us?, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-156, https://doi.org/10.5194/epsc2020-156, 2020.
With recent scientific experiments carried out and results have shown an immense studies in
operation in the complex lunar environment and exploiting the moon base as a scientific platform
for both research and major challenges in exploration. Notion Robotics Lab proposes a highly
advanced lunar lander to prepare future missions on moon. The scientific areas for investigation
on the lunar lander include the radiation environmental and its effect, dust, plasma, the most
important being the properties of moon dust and its effect on human intervention. Notion
Robotics Lab will propose a payload which interfaces the information and the boundary
conditions. This paper discusses the scientific objectives for the futuristic mission which
emphasizes human robot exploration and builds a prototype scientific payload to be part of the
mission and also design of scientific instruments.
Notion Robotics Lab has developed the sophisticated autonomous co-operative rovers with
multiple intelligence systems to study life on lunar base and capable of handling multiple
decisions without human interference. This rover will be built as per the map of the terrains in
the lunar base thus operating different tasks. With advancement of different payloads and
scientific instruments the rover may able to map the large tracts of the surface thus do complex
tasks and experiments. Notion Robotics Lab plans to execute with the partnership with
Universities and Space Agencies thus proposing broader experiments in futuristic lunar mission.
Keywords:- Autonomous Co-operative Rover, Artificial Intelligence, Scientific Instruments,
Understanding Life, Lunar Lander
How to cite: Rao, S. and Chowdhury, S.: Scientific Co-operative Rover with Artificial Intelligence for Futuristic Scientific Experiments on Moon, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-1124, https://doi.org/10.5194/epsc2020-1124, 2020.
In May 2021, a group of students and young professionals from EuroMoonMars will construct a lunar-analogue habitat inside a lava tube in Iceland, known as CHILL-ICE.
As a preparation for semi-permanent humanned missions to the lunar surface, analogue field tests on Earth will greatly improve the chance of a mission success. Looking at prospective habitat locations in or on the lunar surface, lava tubes may present an excellent opportunity in terms of safety and efficiency. These locally occurring features provide a rigid structure with a solid ground, and therefore offer protection from radiation, temperature variations, regolith, and micrometeorite impacts [1]. Furthermore, the unaltered rocks and minerals inside lunar lava tube systems will grant a unique insight into the origin of the Moon, and with that, the Earth [2].
Lava Tubes
Lava tubes on Earth are most commonly found in areas with deep-mantle volcanic activity, such as ‘hot spots’: places where mantle plumes arrive at the surface (Hawaii, Iceland, Canary Islands). Geochemically speaking, the basaltic rocks present at these locations on Earth are quite comparable to their lunar counterparts in major element compositions. As most of the larger lava tubes on Earth are located on oceanic islands, they are highly suited to explore the psychological factors of being remotely distanced from the rest of the Earth. Colder regions, such as on Iceland or at the high peaks of Mauna Loa on Hawaii, are preferred for analogue habitats due to less biochemical weathering of the environment. The high latitude of Iceland further aids the lunar-day simulation aspect of an analogue habitat, as there can be over 20 hours of sunlight in the summer, and only 4 hours of sunlight in the winter. The EuroMoonMars and future EXTAR teams are therefore planning to set up a lunar-analogue habitat inside a lava tube on Iceland.
Earlier campaigns
In September 2018, a reconnaissance campaign was organized to scout multiple lava fields across Iceland for their suitability to host a lunar analog habitat [3]. The most promising site found was the Surtshellir-Stefanshellir cave system in the Hallmundarhraun lava flow in the Western part of Iceland, see Figure 1. At the easternmost part of the Stefanshellir lava tube, there is a large open gallery with a relatively flat surface within the tube. This would be an optimal location for the construction of a lava tube habitat.
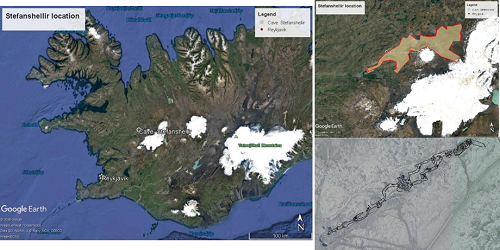
Figure 1: Location of the Stefanshellir cave system. Top left image shows the location in Iceland, top right shows the Hallmundarhraun lava field (in light yellow). Bottom right shows an overlay of the Stefanshellir cave system as drawn by J.R. Reich jr., in 1975, over aerial footage.
Upcoming scout mission
This year a follow-up scout mission to the lava tube systems of Hallmundarhraun is planned for the 28th of June until the 4th of July 2020. The main goal is to investigate the lava tube and its direct surroundings into a much greater detail. Inside Stefanshellir, the aim is to make at least two 180-degree 3D movies for a virtual walkthrough tour, take precise measurements of the dimensions of the gallery, and 360 degrees pictures for a model. On the surface, the focus lies on making aerial maps to scout for visible signs of the subsurface lava tubes [4] and setting up communications and solar observational antennae.
Besides investigations regarding the lunar analog mission, geological fieldwork to the lava field will be performed to create a clearer reconstruction between Stefanshellir and other lava tubes within Hallmundarhraun. Directly located to the east of Stefanshellir, lies Surtshellir, a maze-like cave that is unlikely to have formed in one event. Another lava tube is located directly to the west, called Hulduhellir, or “secret cave” [5], as it has no openings to the surface and is known only through ground penetrating radar and magnetometric studies. There are in total another seven lava tubes in the lava flow confirmed and discovered thus far, but it is likely that there are other, still pristine and unopened lava tubes yet to be found.
Simulation mission
The final lunar analog habitat will be constructed end of May 2021. Besides earlier campaign objectives, the simulation mission will focus on the feasibility of setting up a lunar tube habitat in-sim. This means that the habitat should be deployable by four astronauts in a tight and possibly dark environment within ten hours. Other instruments will be deployed out of simulation, this would compare to the deployment of instruments via robotic missions in earlier stages of lunar habitation. Figure 2 provides a rough overview sketch of some crucial instruments used in the simulation mission.
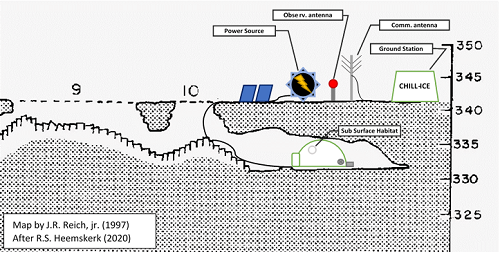
Figure 2: Rough sketch of the planned base for the CHILL-ICE campaign in May 2021. The subsurface habitat’s shape is still to be determined and will not (yet) include any large life support systems, such as greenhouses or water replenishment systems. On the surface, several instruments will be deployed out-of-simulation; comparable to robotic deployment in lunar missions.
Even with a lightweight, partially inflatable, habitat, this is expected to take up the largest part of the first mission. From the ten days set out for the campaign, only two and a half day will be spent in simulation; the rest of time will be to conduct further research to the terrain and its origin, other ISRU objectives, drone mapping, communication protocols, solar observations, (aerial) gravimetric, LIDAR, and magnetometric studies, and of course training in setting up the habitat locally in an efficient and safe manner.
We would like to thank Space Iceland, 4th Planet Logistics, Prof. Bernard Foing, EuroMoonMars, and ILEWG for their great support during our campaign.
[1] M.V. Heemskerk et al., LPSC50, #1693, (2019)
[2] C.L. York et al., LPI Joint Workshop on New Technologies for Lunar Resource Assessment, (1992)
[3] M.V. Heemskerk et al., EGU2019-17503-1, (2019)
[4] P. Lee et al., LPSC50, #3118, (2019)
[5] C. Wood et al., Expedition Report Hallmundarhraun 2003 Iceland, (2004)
How to cite: Heemskerk, M., Pouwels, C., Kerber, S., Downes, E., Heemskerk, R., and Foing, B.: CHILL-ICE: Construction of a Habitat Inside a Lunar-analogue Lava-tube: Iceland Campaign of EuroMoonMars, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-901, https://doi.org/10.5194/epsc2020-901, 2020.
The time for humans to return to the Moon is upon us. This time we will not just go to the moon to collect some rocks and to leave only footprints. This time we will build permanent settlements and colonize the Moon. Our plan is to enable the building of international Moon settlements. There are numerous space agencies, companies and research institutions working on building rockets that will carry payload to the moon but what we do when we get there has mainly been focused on small scale rover based exploration. It is high time we started the work of designing and building human lunar settlements. The idea is to gather all of the space agencies, companies and research institutions to work in one place where they can combine forces and robotically build prototype Moon structures and landing pads on Earth, with the goal of creating robots that will be sent to the Moon to create human settlements. The group of participants who will carry out the Research & Development is called the IMA (the International MoonBase Alliance).
Accomplishments to date:
HI-SEAS (the Hawai’i - Space Exploration Analog and Simulation):
We held five long duration Mars missions with NASA and the University of Hawaii in a habitat we designed and built on Mauna Loa, an active volcano and the biggest mountain in the world (by volume) on the Big Island of Hawaii. Each mission comprised of 6 crew staying in a 110 sq m (1,200’ sq. ft.) dome to test crew selection and crew psychology (Figure 1). If during the mission crew members left the habitat, that was considered an “Extra Vehicular Activity” (EVA). EVAs were conducted according to strict EVA rules with crew wearing analog spacesuits. All communications from the habitat to the rest of the world were delayed 20 minutes each way to simulate the lag in communicating with Mars. The missions varied between 4 to 12 months in length.
Figure 1: The HI-SEAS habitat.

In the last few years, we have pivoted from NASA Mars missions to IMA Moon missions, which are shorter in duration (from weeks or days). These missions are more about giving a larger group of people practical “off-world” experience and about testing research experiments and technologies needed to build a lunar settlement (Figure 2). We have built a “Mission Control” facility. We are testing new and much improved EVA suits equipped with 3D cameras and head-up displays to better communicate with Mission Control.
Figure 2: HI-SEAS lunar mission crewmembers performing an EVA in a lava tube.

PISCES (the Pacific International Space Center for Exploration Systems):
PISCES is a State of Hawaii R&D group. We have worked with NASA to sinter powdered Hawaii lava rock (96% the same chemistry as lunar regolith) into building materials stronger than specialty concrete. We created “pavers” which we deployed into a landing pad using a rover and tested it with a mounted rocket engine (Figures 3 & 4). Rodrigo Romo who heads up PISCES, spent 6 months in Biosphere 2 giving us a wealth of information about sealed self-sustaining environments.
Figure 3: PISCES rover testing.

Figure 4: PISCES rocket engine test.

IMS (the International MoonBase Summit):
We held the first IMS in October of 2017. 100 scientists, engineers, designers, economists, legislators, astronauts and students, gathered in Hawaii to brainstorm the first permanent lunar settlement. Out of this gathering was created the IMA. We published our findings in a book called “Mahina”, the word for Moon in Hawaiian. It is our plan to build a first Moon Settlement and call it “Mahina Lani” or “Moon Heaven”.
The plan going forward:
IMA (the International MoonBase Alliance):
The IMA plan calls for a 1,000 acre “lunar landscape” campus on which we will build lunar structure prototypes. We are now in phase one on a much smaller scale. We are building a sealed windowless 12 meter (40’) diameter dome with an airlock. Our plan is to build it out of layers of “radiation proof” cement and use spherical projection systems to simulate windows and other desirable features. We plan to conduct a series of experiments with different internal configurations to simulate crew quarters, mission control, engineering bays, food growing facilities, meeting rooms, common areas, mess halls, recycling centers and entertainment spaces.
The IMA vision is to send robots to the Moon that will 3D print structures that will be occupied by humans when the time comes. The focus will be on using ISRU (In Situ Resource Utilization) to build self sustaining lunar settlements (Space Ports). The oceanic rock of Hawaii ideal because it is the closest simile to lunar regolith that's we can find on Earth. Hawaii is also a melting pot of Asian and American cultures, so it’s the perfect place for cooperation by and between American and Asian space settlement efforts.
Let’s all work together and build a permanent lunar settlement, a MoonBase, by the end of this decade, “not because it’s easy, but because it’s hard” (quote by John F. Kennedy).
How to cite: Rogers, H., Musilova, M., Romo, R., Ponthieux, V. P., and Foing, B.: How to Build Moon Bases, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-1026, https://doi.org/10.5194/epsc2020-1026, 2020.
Introduction
The Hawaii Space Exploration Analog and Simulation (HI-SEAS) habitat is a lunar and Martian analog research station located on the active volcano Mauna Loa in Hawaii [1]. Missions that take place at HI-SEAS are open to space agencies, organizations and companies worldwide to take part in, provided their research and technology testing will help contribute to the exploration of the Moon and Mars [Figure 1]. The International MoonBase Alliance (IMA) has been organizing regular simulated missions to the Moon and Mars at the HI-SEAS habitat since 2018. A series of EuroMoonMars IMA HI-SEAS (EMMIHS) missions have been taking place at HI-SEAS since 2019. These missions bring together researchers from the European Space Agency (ESA), IMA, the International Lunar Exploration Working Group (ILEWG), European Space Research and Technology Centre (ESTEC), VU Amsterdam and many other international organizations [2,3]. The EMMIHS missions typically last for two weeks each. During this time, the crew is isolated within the HI-SEAS habitat, which they cannot leave without performing EVAs (Extra-Vehicular Activities) in analog spacesuits and with the permission of Mission Control, also based in Hawaii [3,4,5]. A remote support team at ESTEC, the Netherlands, provides further support for the crew.

Figure 1: Analog astronauts entering a lava tube entrance close to HI-SEAS.
Research Projects
The surroundings of the HI-SEAS habitat are covered in lava and they contain very interesting geological features from a planetary science perspective, such as lava tubes. Crews and researchers have been collaborating with scientists at NASA Goddard, for instance, on performing biochemical and geophysical studies on some of the lava tubes. Research at HI-SEAS is thus focused on collecting geological and geochemical samples with implications for astrobiology, past lunar and Martian geology, and for habitability research purposes. The crews also perform architectural research inside the habitat and inside lava tubes, with implications on human psychology during long duration space missions. Furthermore, the effects of radiation on humans and the potential of growing food using local regolith is also studied at HI-SEAS.
Technology Field-Testing
From a technological point of view, the crews at HI-SEAS also test various equipment that is likely to be of great importance to humans living on the Moon and Mars. These include different types of rovers, drones and 3D printers. All of these technologies have proven to be very useful and needed by the crews. Future campaigns will be further developing tests on these devices and they will be integrating them even more into the mission operations.
Outreach & Educational Work
Missions at HI-SEAS also aim to increase the awareness about the research and technology testing that can be performed in analogue environments, in order to help humans become a multiplanetary species. Mission crews thus perform outreach and educational activities as well. Their goal is to reach out to and inspire as many young people as possible to be interested in STEM subjects. Some of these projects involve installing art projects at HI-SEAS, creating videos for school children and performing research experiments designed by students from all around the world [Figure 2].

Figure 2: IMA mission crewmembers performing outreach activities.
Future Plans
The research and technological experiments conducted at HI-SEAS are going to be used to help build a high fidelity Moon base simulator in Hawaii, and ultimately to establish an actual base on the Moon, as part of IMA’s major goals. Such technology testing will include closed-loop systems, in situ resource utilization, construction of agricultural systems and other sustainable processes at HI-SEAS. Furthermore, future missions at HI-SEAS include more EMMIHS campaigns, collaborative missions with ESA, NASA, University of Hawaii and with companies, such as SIFT and Ketone Technologies.
Acknowledgements
We would like to thank the crews EMMIHS-I through to EMMIHS IV (S. Mulder, A. Weert, M. Musilova, N. Sirikan, J. Burstein, B. Pothier, S. Kerber, A. Wanske, J. D’Angelo, A. P. Castro de Paula Nunes & C.R. Pouwels, et al.) and the HI-SEAS Mission Control support staff (Andrew Cox, Paul Ponthieux et al.). We would also like to thank the ILEWG EuroMoonMars remote support team (B. Foing, J. Ageli, J. Preusterink, A. Beniest, A. Sitnikova, M. Heemskerk, et al.).
References
[1] https://hi-seas.org
[2] Musilova M, Rogers H, Foing B, Sirikan N. et al. (2019), EMM IMA HI-SEAS campaign February 2019, EPSC-DPS2019-1152
[3] Sirikan, N., Foing, B., Musilova, M., et al. (2019). EuroMoonMars IMA HI-SEAS 2019 Campaign: An Engineering Perspective on a Moon Base, IAC, 21-25 October 2019. Washington DC, USA.
[4] Musilova, Michaela, Henk Rogers, and Bernard Foing. “Analogue research performed at the HI-SEAS research station in Hawaii.” Geophysical Research Abstracts. Vol. 21. 2019.
[5] https://moonbasealliance.com
How to cite: Musilova, M., Rogers, H., and Foing, B.: International MoonBase Alliance missions at HISEAS, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-1035, https://doi.org/10.5194/epsc2020-1035, 2020.
Introduction: The EuroMoonMars IMA HI-SEAS 2019 campaigns (EMMIHS) are field research campaigns, an initiative directed by the International Lunar Exploration Working Group (ILEWG) of the European Space Agency (ESA) in collaboration with the International MoonBase Alliance (IMA). The purpose of these campaigns is to conduct scientific experiments and test technological instruments relevant to space exploration and extraterrestrial habitation. The team for the second edition of this campaign consisted of six crewmembers, based at the Hawaii Space Exploration Analog and Simulation (HI-SEAS) [1] habitat with support from the Mission Control Centre (MCC), based at the Blue Planet Research Lab in Hawaii, and remote support based at EuroMoonMars ESA/ESTEC in Noordwijk, the Netherlands.
In 2019, the EuroMoonMars campaign was launched at HI-SEAS, bringing together researchers from the European Space Agency (ESA), IMA, the International Lunar Exploration Working Group (ILEWG), European Space Research and Technology Centre (ESTEC), VU Amsterdam and many other international organizations [2,3]. These campaigns aim to increase awareness about the research and technology testing that can be performed in analog environments in order to help humans become multi-planetary species.
Furthermore, the research and technological experiments conducted at HI-SEAS are going to be used to help build a Moon base in Hawai’i, and ultimately to create an actual Moonbase on the Moon, as part of IMA’s primary goals [6].
This paper will deliver details of the research projects conducted and an overview of the crew engineer’s routine. The paper will also present the challenges and outcomes of the mission and its activities from an engineering perspective.
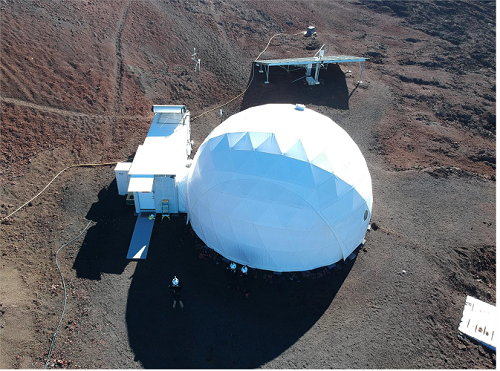
Fig. 1 HI-SEAS habitat view. The picture was taken during an EVA using a drone.
The Role of The Crew Engineer: It was established, based on the feedback from previous analog missions, that at least one crewmember serving as an engineer with strong analytical, troubleshooting, and hands-on technical skills is vital for the mission’s success. The engineer’s tasks include successfully performing technological research using a drone; the assembly of a small rover to be operated remotely by remote control; HI-SEAS habitat operations and maintenance; network communication systems and data exchange between the ‘Moon’ and ‘Earth.’
The crew engineer (CE) is responsible for ensuring nominal operations and the maintenance of the EVA (extra-vehicular activity – any activity performed outside the habitat while wearing analog spacesuits) equipment like EVA spacesuits, life support systems, the communication network, and devices). The engineer is also responsible for the habitat equipment (power systems, solar panels, inverters, batteries, generators, weather stations, surveillance systems, heating systems, and network communication systems).
The CE is also in charge of checking the status of the EVA equipment before and after each EVA, as well as gathering feedback from the EVA team. A daily Engineering Report is prepared and provided to the MCC with a summary of engineering specific activities, the status of the equipment, recommendations for improvements, and any requests for further support from the MCC Engineering Support Team. The CE is also in charge of supporting other crew members’ research projects if needed.

Fig. 2 HI-SEAS control panel.

Fig. 3- EVA Equipment and maintenance
With various responsibilities, the CE is vital to ensuring the mission’s safety and projects to be performed with success. Crew Engineers should be prepared not only to operate and maintain the habitat but also to deal with any challenges that might arise from experiments and from living in a Moonbase analog. After the two EMMIHS campaigns, recommendations were provided to ensure the success of future missions and guidelines for other upcoming analog campaigns.
Future plans: Future missions at HI-SEAS include more EuroMoonMars IMA HI-SEAS (EMMIHS) missions, collaborative missions with ESA, NASA, universities worldwide, and with companies, such as SIFT and Ketone Technologies. These missions will continue to contribute to the development and testing of technologies and sustainable processes to lay a foundat
tion for creating the first long-term settlement on the Moon.
Acknowledgments: First, we would like to thank the EMMIHS II crew (M. Musilova, S Kerber, A Wanske, J D’Angelo, A P Castro de Paula Nunes, C R Pouwels), the Mission Control from HI-SEAS (Andrew Cox et al.), ILEWG’s EuroMoonMars Manager B. Foing, the Remote Support team (A. Jageli, J. Preusterink, A. Beniest, A. Sitnikova, et al.), and A. Jageli for remote support operations of the rover.
We would also like to thank the EMMIHS II sponsors for their generous support: Ruag Space, Capable BV, Kurtz Ersa, dB Matik AG, Tridonic GmbH CoKG, and the Brazilian Space Agency (AEB).
References:
[1] Hawaii Space Exploration Analog and Simulation, https://hi-seas.org
[2] Musilova M, Rogers H, Foing B, Sirikan N. et al. (2019), EMM IMA HI-SEAS campaign February 2019, EPSC-DPS2019-1152
[3] Foing, B. H.; EuroMoonMars 2018-2019 Team, EuroMoonMars Instruments, Research, Field Campaigns, and Activities 2017-2019; 2019LPI....50.3090
[4] Sirikan, N., Foing, B., Musilova, M., Weert, A., M. Mulder, A., Pothier, B., Burstein, J., & Rogers, H. (2019). EuroMoonMars IMA HI-SEAS 2019 Campaign: An Engineering Perspective on a Moon Base, the International Astronautical Congress, 21-25 October 2019. Washington DC, United States.
[5] Musilova, Michaela, Henk Rogers, and Bernard Foing. “Analogue research performed at the HI-SEAS research station in Hawaii.” Geophysical Research Abstracts. Vol. 21. 2019.
[6] International MoonBase Alliance, https://moonbasealliance.com/
How to cite: Castro Nunes, A., Musilova, M., Kerber, S., Pouwels, C., Wanske, A., D'Angelo, J., Foing, B., and Rogers, H.: EMMIHS-2 Analog Moonbase Viewpoint And Results – An Engineering Outlook at the Second Euro-MoonMars IMA HI-SEAS 2019 Campaign, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-1110, https://doi.org/10.5194/epsc2020-1110, 2020.
The project “Inflatable Lunar Habitat” is develop by a group of students, master's degree in architecture, from Germany and is a part of this year's edition of IGLUNA, supported by Swiss Space Center.
The idea of the project is to be created an easily portable laboratory for conducting scientific experiments in extreme weather conditions, here on Earth. But at the same time, the project is designed so that in the future this type of construction will be used to be build a habitat villige located in lava tubes on the moon or even on Mars.
The habitat is designed as an inflatable structure with an aerodynamic shape that is easy and fast to transport, carry out an assembly, it is also designed to be on a temporary basis and generate the least possible impact on the environment at the time of the investigation. For being inflatable is more vulnerable from the outside and the inside as well, because of that it is necessary to ensure the habitat subsystems such as the skin development and connections, the floor connections, the airlock and the climate control.
The structure is arranged of several different in type and function layers. Starting from inside with inflatable transparent skin of ETFE-foil, serving to provide a safe and sterile place for the experiments, followed by a support system of two layers of crossing inflatable tubes, and ending with another layer of ETFE- foil serving to protect the support structure from external mechanical impacts. And at the top, the entire prototype is protected from wind, rain and sun by a final layer. The whole inflatable structure is firmly attached to a steel frame, which in turn is attached to the ground. Inside the steel frame is the floor, which is made of aluminum honeycomb panels, which provide the necessary stability, flat surface and protection against slipping.
Due to the impossibility of the actual build of the prototype during this year's field campaign, due to the global pandemic, we included in the project and developed our vision for the lunar village, using as a modular unit for its design, the prototype of the habitat constructed for the Earth.
Although this year the project remained at the level of technical drawings and 3D computer model, next year with the help of our current sponsors and hopefully new ones, as well as with the support of the Swiss Space Center we expect to build a real prototype of inflatable lunar habitat and to test it on Mount Pilatus in Switzerland during the field campaign of IGLUNA 2021.
How to cite: Dimova, L. and Encheva, K.: Inflatable Lunar Habitat, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-971, https://doi.org/10.5194/epsc2020-971, 2020.
The Low Earth Orbital (LEO) setting has been the frontline for validating and testing technologies human spaceflight, robotic spaceflight, and human-robotics relations for the past 60 years. The Moon is the essential next step for constructing and testing surface-based robotics, both for Lunar and Martian purposes. Underground water-ice and mineral-rich regolith allows for vital Lunar human long-term sustainable habitation. Earth-based Lunar analogs are essential elements for preflight verification and risk minimization.
With the CRADLE (California Research Analog for Deep Space and Lunar Exploration) location in Lucerne Valley, CA, a new way that allows human-in-the-loop ISRU (In-Situ Resource Utilization) operations using exploration hardware such as rovers, robots, and surface habitats can now be enabled. Simulating Lunar ISRU operations with remote mission control and surface assets, including tele-robotics and a crewed habitat, will help to identify potential efficiencies and constraints for real Lunar and potential Martian long-term human settlements.
During the summer months of 2020, a team of researchers comprised of physicians, scientists, individuals from both public and private space agencies, and students from undergrad to Ph. D levels conducted a plethora of human-in-the-loop ISRU tests and experiments focused around human habitation in an analog Lunar environment and interactions with ISRU analog technologies that operated in similar Lunar analog conditions — all within the vast CRADLE facilities in Lucerne Valley, CA. These tests included, but were not limited to, radio astronomy using small-scale portable radio telescopes in order to demonstrate potential radio astronomy science done near the southern Lunar pole, hydroponics development and maintenance, safe and efficient waste disposal, “EVA”s in mock astronaut suits, command and control of various robotic ground assets near the habitat, and regolith ISRU in order to attempt to produce building materials from regolith-like geology and robotic manufacturing of said materials. The team consisted of 3 men and 3 women and each person spent 3 days within the CRADLE primary site where the habitat is located. Psychological, physical, and emotional evaluations of each participate were performed both before, during, and after the habitation period.
Next year the team plans to perform a trade study comparing various habitat construction techniques using these ISRU capabilities. Through the simulation of technical, operational and even legal scenarios, these efforts will improve mission safety, execution and value. The CRADLE facility helps provide rapid iteration and design augmentation while testing and validating future technologies alongside human factors requirement.
How to cite: Singh, H.: California Research Analog for Deep Space and Lunar Exploration (CRADLE) 2020 Astronaut Simulations, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-1083, https://doi.org/10.5194/epsc2020-1083, 2020.
The Moon Village Association (MVA) is a global organization that aims to foster collaboration between nations, space agencies, industry and the public, in order to facilitate the creation of a Lunar Economy. Despite its name, the purpose of the organization is not to create a base on the Moon. The "Moon Village" is the collection of people and organizations here on Earth that will collectively set Lunar activities in motion.
The MVA's pilot mission - sending a Camera to the Lunar Surface to capture images of the earth and recreate the “Overview Effect” - aims to test in action how combining the capabilities of the MVA’s individual and institutional members can lower the entry barrier to the Lunar economy.
The technical objective of the mission is to capture and live-stream a video of the Earth for 1 Lunar Day. The data will be broadcasted and utilized to engage the scientific community and general public to maximize mission returns for this and future missions.
The challenge:
Compared to Earth orbit missions, lunar missions are less prevalent, more technically complex with extra risks and completely different investment scales and timelines. This means that non-institutional space players have fewer opportunities to participate in lunar science and the creation of the Lunar Economy. There is also a lot of untapped capacity in the non-space world: Drawing a parallel to GIS, Sat Comms, Navigation etc., and progress achieved due to publicly accessible space-asset data in non-space industries, the potential benefit of opening up Lunar exploration to more players seems self-evident. The challenge is, however, enabling this global potential.
Our talk will address this issue and will be structured to cover the following points:
Mission description: We will describe our goals, why we decided to put a camera on the Moon, what are the technical requirements and why we selected the “Overview Effect” as our main objective.
MVA Collaboration framework outline: This will address how we combine our varied strengths within the MVA to create a mission and how we want to see our members putting missions together in the future, on their own initiative.
The MVA role, the role of volunteers and institutional partners: We will present how the building blocks fit together, what each side offers and receives through this collaboration.
Lessons learned from the pre-phase A and phase A of the mission: We will discuss technical, financial, managerial, outreach and public engagement aspects, method-of-working issues, what were the biggest challenges to milestone success and how they were overcome.
Obstacles and challenges moving forward: We will address our cost and schedule elements, paths to funding and risk management, and also ethics and responsible culture setting.
How can someone get involved: As we are looking to engage both the scientific community and the public, we will be presenting information on where one can stay updated with our work, and what are the options for participation, either as an individual, an institution or a company.
The talk will be designed and delivered from First Payload Project team members. The team is made up of both space and non-space industry professionals, all volunteers distributed across multiple time zones, without common working hours and a high chance of most members never meeting in person. The team is supported by the MVA’s institutional members (agencies, educational institutions and industry) in the form of in-kind contributions: an exchange of services, knowledge or materials given by the institutional member due to synergies between the mission objectives and the member’s own scientific or business objectives.
This presentation will not focus on technical or scientific objectives or results of the 1st MVA Payload Project but on the process that is being created as a rubric for future lunar projects. From planning to set-up and further, and with the understanding that this is an ongoing process, this talk will present a guide of sorts or in the very least a detailed example of the processes necessary for private-sector lunar missions that deviate from the normal client-supplier models of institutional and Earth orbit missions.
How to cite: Koumi, E. and Manghaipathy, P.: Moon Village Association (MVA) Global Collaboration Framework for Lunar Missions, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-1040, https://doi.org/10.5194/epsc2020-1040, 2020.
The Moon is sometimes also called the "eighth continent" of the Earth. Determining how to utilize cis-lunar orbital infrastructures and lunar resources to carry out new economic activities extended to the space of the Earth-Moon system is one of the long-term goals of lunar exploration activities around the world. Future long-term human deep-space exploration missions to the Moon, on the Moon surface or using the Moon to serve farther destinations will require the utilization of lunar surface or asteroid resources to produce water, oxygen and other consumables needed to maintain human survival and to produce liquid propellant for the supply of spacecraft on the lunar surface. In complement to exploration activities, Moon tourism in cis-lunar orbit and on the lunar surface will become more and more attractive with the increase of human spaceflight capacity and the development of commercial space activities. However, the development of a sustainable Earth-Moon ecosystem requires that we solve the following five problems:
(1)How to design alow-cost cis-lunar space transportation capacity? To find an optimal solution, one must compare direct Earth-Moon flight modes with flights based on the utilization of space stations, and identify the most economical spacecraft architectures.
(2)How to design an efficient set ofcis-lunar orbital infrastructures combining LEO space stations, Earth-Moon L1/L2 point space stations and Moon bases for commercial tourism, taking into account key issues such as energy, communications and others?
(3)Significant amounts ofliquid oxygen, water, liquid propellant and structural material will be needed for human bases, crew environmental control and life support systems, spacecraft propulsion systems, Moon surface storage and transportation systems. How to design in-situ resources utilization (ISRU) of the Moon, including its soil, rocks and polar water ice reservoirs, to produce the needed amounts?
(4) How to simulate on the Earth surface the different components and key technologies that will enable a future long-term human residence on the Moon surface?
(5). How to accommodate the co-development of public and commercial space and foster international cooperation? How can space policies and international space law help this co-development?
China has made rapid progress in robotic lunar exploration activities in the last 20 years, as illustrated by the recent discoveries provided by the Chang'e-4 lander on the far side of the Moon. By 2061, China will have gone into manned lunar exploration and built Moon bases. In preparation for this new phase of its contribution to space exploration, lunar surface simulation instruments have been built in Beijing, Shenzhen and other places in China. A series of achievements have been made in the field of space life sciences . An ambitious project to establish a large Moon base simulation test field, the Lunar Base Yulin (LBY) project, currently in its design phase in Yulin, Shaanxi Province in China, will allow the verification of key relevant technologies.
By the 2061 Horizon, we believe that international cooperation and public-private partnership will be key elements to enable this vision of a new, sustainable cis-lunar space economy.
How to cite: linli, G., michel, B., tieqiu, H., jiangze, H., jianping, Y., and yufei, G.: New Economy in space: Cis-lunar economic circle and analogue simulations in China to the 2061 Horizon, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-108, https://doi.org/10.5194/epsc2020-108, 2020.
Abstract
This report presents results of investigations into the special features of the orbital evolution of artificial Moon satellites (AMS) by numerical modeling. The motion of 5180 near-moon objects uniformly distributed in the near-moon space was modeled using the program Numerical Modeling of AMS Motion developed by the authors. The special features in the dynamics of near-moon objects are analyzed and the AMS lifetimes in the orbits are estimated depending on the semimajor axis and the orbit inclination. It is shown that this lifetime is very short for a number of near-moon zones, and the reasons for this phenomenon are elucidated.
1. Introduction
Recent interest has been increased in the study of the near-moon space. Attention is focused at the low near-moon orbits. Many authors, in particular, pointed out the existence of a dependence of the satellite lifetime on the orbit height and inclination. This work was aimed at elucidation of reasons for this phenomenon. We consider orbits with semimajor axes in the range from 1.1 to 15 of the Moon radius with inclinations from 0 to 180 degrees, and objects with flight heights of 100 km to compare our results with the results obtained by other authors. Modeling was performed for a 10-year time period taking into account perturbations of the selenopotential up to 50 order harmonics and degrees as well as gravitational effects of the Sun and Earth considered as material points. In addition to the estimation of the AMS lifetimes, we here present results of analysis of the special features in the dynamics of the objects that explain the reasons for the above-indicated phenomenon.
2. Results
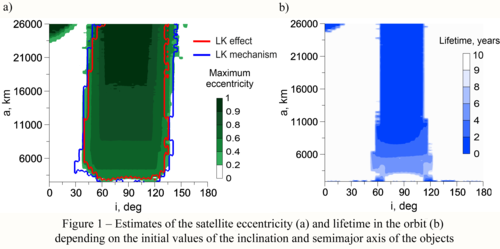
The data shown in Figs. 1 and 2 illustrate the main features in the dynamics of the near-moon objects. Figure 1 shows the dependences of the increase in the AMS eccentricity and lifetime on the values of the semimajor axis and inclination for the entire ranges of their values, and Fig. 2 shows these dependences drawn in more detail for the low-orbiting objects. As can be seen, the increase of the eccentricity accompanied by the decrease of the lifetimes of satellites in the orbits is observed both for low and high orbits. Investigations showed that the reasons for this phenomenon differ at different heights, and for high objects, they significantly correlate with the orbital inclinations.
The increase of the eccentricity for the low orbits is caused by the complex structure of the gravitational field of the Moon. It is significant that if we consider only the Moon compression disregarding the special features of the field, no clearly pronounced increase of the eccentricity will be observed, and the lifetimes of all objects will exceed 10 years. These results are in good agreement with the data of other authors [1-3].

To explain the reason for the increase in the eccentricity for intermediate and great heights, we considered the influence of the Lidov–Kozai mechanism [4-6] on the orbital evolution of the AMS using numerical and analytical method [7]. This mechanism is manifested through the resonance and the Lidov–Kozai effect. The Lidov–Kozai effect was estimated based on the presence of the energy transfer between the eccentricity and the inclination while preserving the integral ![]() whereas the presence of the sharp Lidov–Kozai resonance was established based on the proximity to zero of the value of the Lidov–Kozai integral for a negative value of the Lidov integral
whereas the presence of the sharp Lidov–Kozai resonance was established based on the proximity to zero of the value of the Lidov–Kozai integral for a negative value of the Lidov integral ![]()
Contours of the areas of influence of the mechanism (dark blue curves) and of the Lidov–Kozai effect (red curve) according to our estimates are shown in Fig. 1а. Our analysis of the results (Fig. 1а) has demonstrated that the main source of the eccentricity increase for еру intermediate and high orbits is the influence of the Lidov–Kozai mechanism on the AMS dynamics. The increase in the eccentricity of the high near-equatorial orbits is explained by the direct influence of the Earth.
3. Summary and Conclusions
Our investigations have shown that a significant number of the near-moon objects have short lifetime in the orbit, which is explained by the increase of the eccentricities of their orbits. Analyzing the results obtained, we can conclude that for the low orbits, this phenomenon is caused by the direct influence of the complex gravitational field of the Moon, and for the intermediate and high orbits, it is explained by the influence of the Lidov–Kozai mechanism.
Acknowledgements
This work was supported by the Russian Science Foundation (Scientific Project № 19-72-10022).
References
[1] Ramanan, R. V. and Adimurthy, V.: An analysis of near-circular lunar mapping orbits, Journal of Earth System Science, vol. 114, no. 6, 2005, P. 619–626.
[2] Song, Y. J., Park, S. Y., Kim, H. D., & Sim, E. S.: Development of precise lunar orbit propagator and lunar polar orbiter's lifetime analysis// Journal of Astronomy and Space Sciences, 2010. V. 27(2), P. 97–106.
[3] Gupta, S., Sharma, R.: Effect of Altitude, Right Ascension of Ascending Node and Inclination on Lifetime of Circular Lunar Orbits, International Journal of Astronomy and Astrophysics, Vol. 1 No. 3, pp. 155–163, 2011. DOI: 10.4236/ijaa.2011.13020
[4] Lidov, M. L.: The evolution of orbits of artificial satellites of planets under the action of gravitational perturbations of external bodies// Planetary and Space Science, 1962 V. 9, Is. 10,
P. 719–759.
[5] Kozai, Y.: Secular perturbations of asteroids with high inclination and eccentricity // Astron.J.1962. V. 67. P. 591 – 598
[6] Ito, T., Ohtsuka, K.: The Lidov–Kozai Oscillation and Hugo von Zeipel, Monogr. Environ. Earth Planets, Vol. 7, No. 1, pp. 1–113, 2019.
[7] Aleksandrova, A.G., Bordovitsyna, T.V., Popandopulo, N.A. et al.: A New Approach to Calculation of Secular Frequencies in the Dynamics of Near-Earth Objects in Orbits with Large Eccentricities, Russ Phys J , Vol. 63, No 1, pp. 64–70, 2020.
How to cite: Popandopulo, N., Bordovitsyna, T., Aleksandrova, A., Avdyushev, V., and Tomilova, I.: Numerical Modeling of the Special Features in the Dynamics of Near-Moon Objects, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-871, https://doi.org/10.5194/epsc2020-871, 2020.
The International Lunar Decade (ILD) is proposed as a framework for international cooperation in lunar exploration and development from 2021-2030. ILD is inspired by the International Geophysical Year (IGY - 1957-8) when 66 countries and tens of thousands of scientists cooperated to understand planet Earth as a whole. Satellites were launched by the USSR. and the U.S. marking the dawn of the space age. Discovery of the Van Allen belts and knowledge and capabilities across many fields gained thru IGY led to the technologies that undergird the modern economy that depend on satellites for global communications, positioning and navigation, and Earth observation. IGY fostered international cooperation that has enabled global challenges like climate change to be understood and strategies framed to enable global action to mitigate climate change and other emerging global threats.
As with IGY the ILD global initiative will be coordinated by a small secretariat established by the UN. Countries, international organizations such as COSPAR, NGOs, universities, cities and regions, and private firms will propose and manage projects with knowledge coordination thru the ILD secretariat and knowledge sharing thru numerous mechanisms many with a legacy to IGY.
In the coming decades the ILD as a framework for development of a rules-based order can have an impact comparable to the future creating transformational impact of IGY. A rules-based order is necessary for sustainable development. A rules-based order enables effective conflict resolution. Poor conflict resolution leads to the development of weapons, fielding of militaries, hostilities and war – the most wasteful, costly and destructive human activity.
ILD is intended to open opportunities for small and developing countries to take part in creating the space-resources economy building upon the lunar exploration activities initiated by the U.S. and larger spacefaring powers including Russia, China, ESA, India, Japan, and others that are already actively involved in lunar exploration. A rules-based order enables shared infrastructures and international financing mechanism that enable infrastructure financing and the cooperation that enables knowledge sharing and that can accelerate adoption of innovations. The ILD enables the rules-based order in outer space that opens the possibility for sustainable development for centuries to come while strengthening the international cooperation necessary to avert global catastrophe in the decade ahead. ILD provides a framework to enable a rules-based order necessary for success in meeting UN Space 2030 goals.
The specific goal of ILD is to achieve sustainable presence on the Moon by 2030. The ILD framework will enable the development of policies for use of lunar resources as well as to govern operations on the Moon by multiple parties. The ILD offers the opportunity to advance a rules-based order to govern humankind’s expansion into the Solar System to fulfill the intent of space treaties that have been negotiated thus far thru the United Nations whose aspiration is summarized in Article I of the Outer Space Treaty:
The exploration and use of outer space, including the moon and other celestial bodies, shall be carried out for the benefit and in the interests of all countries, irrespective of their degree of economic or scientific development, and shall be the province of all mankind.
The ILD is fully consistent with and welcomes all other lunar exploration and development initiatives including the Moon Village, the U.S. Artemis project, China's Chang'e Project, and other initiatives. The ILD provides a framework for cooperation that can boost and broaden all lunar exploration and development initiatives that do not have a military orientation.
How to cite: Beldavs, V., Foing, B., Crisafulli, J., and O'Brien, D.: Towards a rules-based order for the emergence of a space resources-based economy leading to a lunar renaissance, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-1107, https://doi.org/10.5194/epsc2020-1107, 2020.
In 2040, a world where 1,000 people stay on the moon all the time and 10,000 people visit every year is imagined and its feasibility and technology roadmap are discussed. In such a world, not only the minimum
infrastructure necessary for residents and travelers to survive such as habitation, transportation, power, communication, food and water, but also comfortable living and entertainment are required. Also, in order to make a lunar society sustainable, not only the individual elements such as in-situ use of resources (ISRU) technology and closed circulation system, which are currently being researched and developed all over the world, but it is also important to design architecture and operate the infrastructure and facilities on lunar surface and lunar orbit so that they work together in an organic manner to improve efficiency and optimization as a whole. In this session, we will present one way of thinking about the comfortable lifestyle for residents in the 2040 lunar society, and the overall operation and management that enables a sustainable lunar society.
How to cite: Imai, S.: Operation of future lunar society in 2040, Europlanet Science Congress 2020, online, 21 Sep–9 Oct 2020, EPSC2020-1108, https://doi.org/10.5194/epsc2020-1108, 2020.
Please decide on your access
Please use the buttons below to download the presentation materials or to visit the external website where the presentation is linked. Regarding the external link, please note that Copernicus Meetings cannot accept any liability for the content and the website you will visit.
Forward to presentation link
You are going to open an external link to the presentation as indicated by the authors. Copernicus Meetings cannot accept any liability for the content and the website you will visit.
We are sorry, but presentations are only available for users who registered for the conference. Thank you.