
Generation of Global Surface and Shallow Subsurface Images of Mars by Radar Sounders Data
 1,2,
1,2,- 1Digital Society Center, Fondazione Bruno Kessler, Trento, Italy
- 2Department of Information Engineering and Computer Science, University of Trento, Trento, Italy
Planetary radar sounders (RS) are spaceborne nadir-pointing instruments operating in High Frequency (HF) or Very High (VHF) frequency bands. Radar signals in these bands can propagate through planetary subsurfaces up to several kilometers. The subsurface structure can be inferred by analyzing the radar echoes recorded by these types of instruments. Planetary RS data have been a valuable information source for analyzing the subsurface of the Moon [1] and Mars [2]. For mechanical reasons, the deployed RS antennas are typically dipoles. Dipoles illuminate a large area of the overlying surface. Hence, the recorded RS data are typically contaminated by unwanted off-nadir surface reflections, considered clutter. However, these unwanted reflections carry valuable information regarding the nature of the probed surface and the shallow subsurface. Recent research has exploited off-nadir reflections for effectively imaging target planetary surfaces. This is achieved by combining the acquired RS data with a suitable digital elevation model (DEM) of the surface and by exploiting multiple orbital passes over the same region. Kobayashi et al. [3] generated images of the Moon surface by exploiting radargrams acquired by the Lunar Radar Sounder (LRS), which operates at 5 MHz central frequency. Carrer et al. [4] exploited SHAllow RADar (SHARAD) data for generating HF roughness images of the surface of Mars. SHARAD operates at 20 MHz central frequency. Both approaches are effective not only in generating higher resolution HF images of the surface with respect to previous work [5] but also in detecting shallow buried features (that are not easily detectable by standard data analysis) [4]. However, both works are focused on the analysis of small regions. The generation of large area images faces challenges that are not usually present when generating smaller images. These challenges are resulting from large variations in (i) the sensor viewing geometry, (ii) the radiometric properties of the surface, and (iii) the non-uniform data availability. Here, we propose an approach to generate large scale radar HF roughness images of Mars starting from the methodology described in [4]. Global surface roughness images can provide additional insights into surface processes and in detecting additional buried geological structures. We extend the original image generation methodology by proposing approaches for reducing the radiometric artifacts and improving the quality of the large-scale image while preserving the fidelity of the contained scientific information. The radiometric artifacts appear as vertical stripes crossing the image due to the orbital variations of the spacecraft among different acquisitions. This typically results in a variation of the spacecraft’s altitude causing a received echo power fluctuation. Therefore, we apply inter-calibration to compensate the losses caused by the actual spacecraft’s altitude and normalize the echo power with a reference altitude. Radiometric compensation is challenging as the recorded echo power from a given surface point exhibits large variations that are function of the radiation incidence angle. This effect is particularly pronounced in RS data as scattering can be both coherent and incoherent. To compensate for this, we fit the recorded echo power as function of incidence angle with a suitable back-scattering model (i.e., Hagfors [5]). The incidence angle power correction is performed iteratively on smaller portions of the image where we can assume that the surface statistical properties belong to the same distribution. Finally, coherent scattering data originating from the first Fresnel zone are discarded as they generate reflections that are difficult to compensate in the large-scale image. Here, we apply the proposed approach to generate Mars global roughness images by using Mars Advanced Radar for Subsurface and Ionosphere Sounding (MARSIS) data in combination with the Mars Orbiter Laser Altimeter (MOLA) digital elevation model. MARSIS operates at a central frequency between 1.8 and 5 MHz. This implies the possibility of generating images at different frequency bands that could provide different information regarding the surface and the shallow subsurface. As MARSIS operates at lower frequencies than SHARAD, we expect that also in this case the generated images contain shallow subsurface information [4]. Fig. 1 shows an example of Mars HF roughness image at 4 MHz obtained by the proposed methodology over Arabia Terra and Syrtis Major quadrangles. The pixel resolution is 463 m x 463 m. Large intensity pixels correspond to higher surface roughness with respect to the small intensity ones. The results confirm the effectiveness of the approach, where the presence of the radiometric artifacts is minimized while preserving the scientific information integrity. The image contains several detailed surface features such as the area of Mamers Valles shown in Fig. 2. The system of fretted channels appears with an unusual very low roughness in the image with respect to the surroundings. Investigations are in progress to fully understand the origin of this radar response. Roughness images can also be used for better outlining geological units and could help in identifying shallow buried geological formations on a global scale.
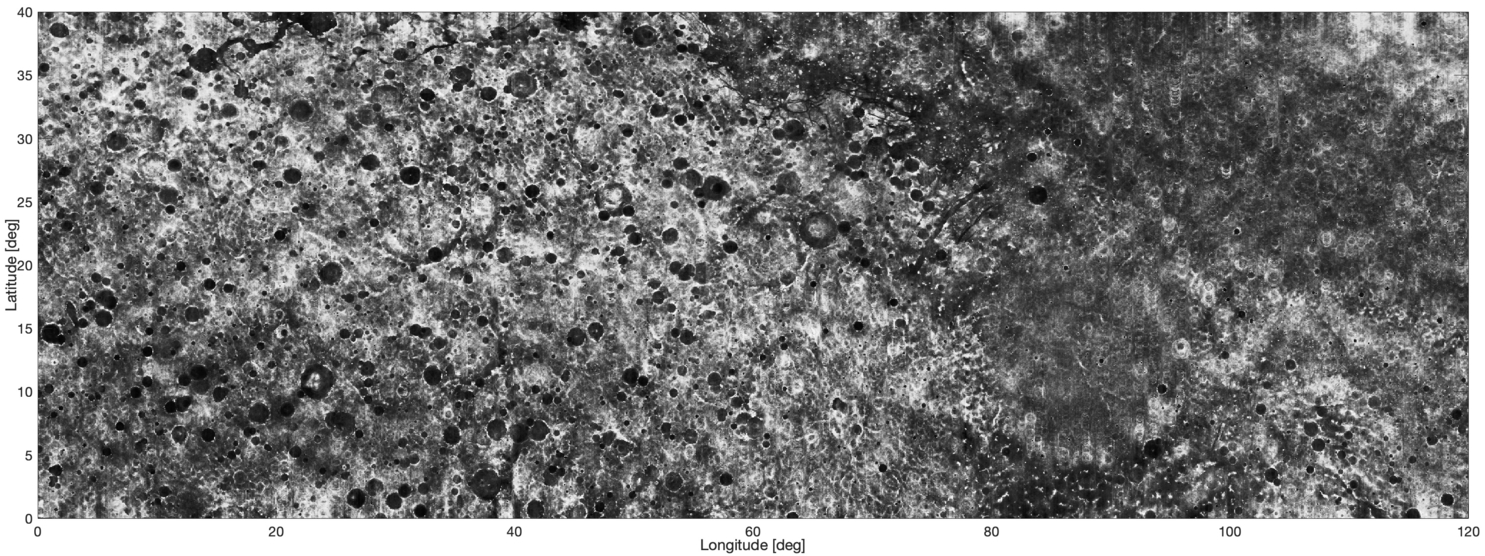
Figure 1. Mars HF Surface roughness image of Arabia Terra and Syrtis Major quadrangles obtained with the proposed method by exploiting MARSIS data at 4 MHz.
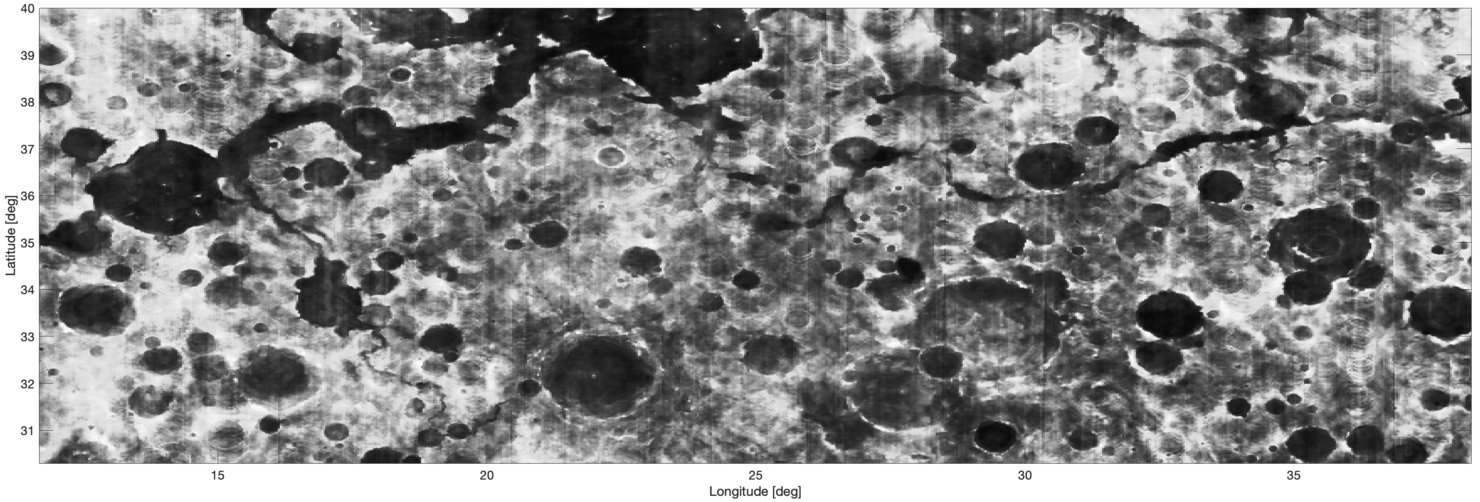
Figure 2. Detailed Mars HF Surface roughness image of Mamers Valles obtained with the proposed method by exploiting MARSIS data at 4 MHz.
REFERENCES
- [1] Ono, et al., “Lunar radar sounder observations of subsurface layers under the nearside maria of the moon,” Science 323(5916), 909–912 (2009).
- [2] Picardi, et al., “The mars advanced radar for subsurface and ionosphere sounding (MARSIS): concept and performance,” in IEEE 1999 International Geoscience and Remote Sensing Symposium. IGARSS’99 (Cat. No. 99CH36293), 5, 2674–2677, IEEE (1999).
- [3] Kobayashi, et al., “Hf (5 MHz) imaging of the moon by Kaguya lunar radar sounder off nadir echo data,” IEEE Transactions on Geoscience and Remote Sensing 56(7), 3709–3714 (2018).
- [4] Carrer, L., et al., “Mars surface imaging by exploiting off-nadir radar sounding data,” IEEE Transactions on Geoscience and Remote Sensing (2020).
- [5] Campbell, et al., “Roughness and near-surface density of mars from SHARAD radar echoes,” Journal of Geophysical Research: Planets 118(3), 436–450 (2013).
How to cite: Hoyo García, M., Carrer, L., Bruzzone, L., and Bovolo, F.: Generation of Global Surface and Shallow Subsurface Images of Mars by Radar Sounders Data, Europlanet Science Congress 2021, online, 13–24 Sep 2021, EPSC2021-319, https://doi.org/10.5194/epsc2021-319, 2021.