
 1,1,2
1,1,2- 1Joanneum Research, Digital, Graz, Austria (piluca.caballo-perucha@joanneum.at)
- 2VRVis, Vienna, Austria (rnowak@vrvis.at)
- 3GMV, Madrid, Spain (apellacani@gmv.com)
The Austrian contribution to Phase B2 Part 1 of HERA mission [1] was carried out in 2020 by JR, VRVis, and two science collaborators under GMV contract. It mainly consisted of the design of tools needed to determine Didymain´s shape [2], [3]. The challenges to be faced in Phase B2 Part 2 of the mission are focussed on Dimorphos 3D reconstruction and must be carried out within the timeframe January-June 2021, therefore some parts are still not finalised. These challenges consist of:
- Parameter definition to optimize Dimorphos imaging to support HERA science return sequence
- Rendering of Didymos images with PRo3D along COP (Core Operations Phase) trajectory
- Dimorphos 3D reconstruction with ColMap [7] using the simulated images along the COP trajectory
- Implementation of evaluation parameters in PRo3D [4] to assess Dimorphos´ reconstruction accuracy
Dimorphos images optimization
The main objective of this task is to obtain the best HERA AFC images of Dimorphos along the COP trajectory. At the same time, the maximal number of images for daily downlink must be considered as it is limited to 16 images per day. Due to the downlink data restriction the images must be optimised by selecting predetermined HERA acquisition times that provide the best imaging of Dimorphos. Therefore, images where Dimorphos appears completely occluded by Didymain, as well as images where the small asteroid is outside the AFC FoV, must be avoided for downlink and reconstruction. To recognise these images, the parameter angular deviation “α” between Didymain (Dd) and Dimorphos (Dm) was defined and the diagonal FoV of the HERA AFC was considered. The calculation and pseudocode to classify if an image should be rendered are displayed in Equation 1 and are based on HERA SPICE kernels.
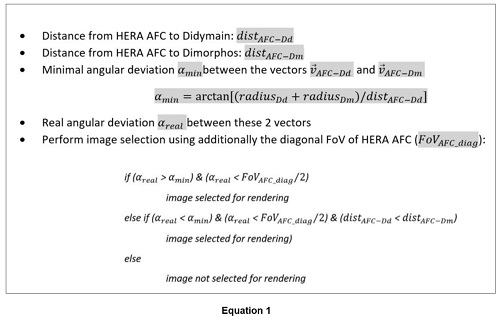
Image rendering of Dimorphos
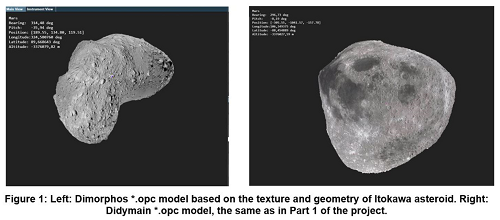
To generate synthetic images of Dimorphos in the most representative and faithful way, the information about the geometry of the Asteroid Frame Camera (AFC), its positions and orientations along the COP trajectory, and a celestial body of shape parameters similar to Dimorphos had to be considered. For the last, a 3D model of the Itokawa asteroid was textured and scaled along the three axes to get Dimorphos similar size. The resulting “*.opc” file can be seen on the left side of Figure 1. For Didymain, the same body approximation taken for Part 1 of the project was used (Figure 1, right).
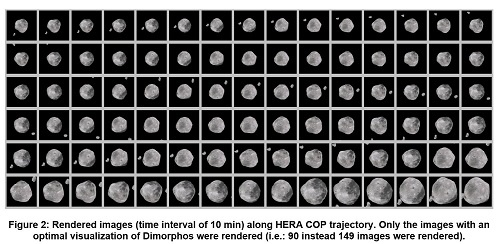
For image rendering the time interval was set to 10 min, as required by GMV, and the PRo3D Viewer [4] was used and interfaced via a “.json” file. As already mentioned, only the images selected with both criteria (angular deviation and AFC FoV) were rendered. An example of the resulting images for COP trajectory in timeframe 2024 (2027-05-22) can be seen in Figure 2:
Dimorphos Shape reconstruction
To determine Dimorphos’ shape, the images rendered with PRo3D are supplied to the ColMap [7] tool, embedded in PRoViP [5]. ColMap performs 3D reconstruction by means of Structure from Motion (SfM). In order to establish correct SfM conditions, all AFC poses and orientations calculated with the SPICE kernels must be transformed with the inverse rotations of Dimorphos to simulate a moving camera around a static scene. Then, the new transformation matrices and the AFC parameters are provided to ColMap [2], [3]. The sequence for 3D reconstruction is as follows:
- Image features extraction (Figure 3, left)
- Image features matching (Figure 3, right)
- Triangulation of sparse image features
- Images´ preparation for dense matching
- Dense depth maps generation
- Fuse dense depth maps
- 3D mesh generation

Reconstruction evaluation
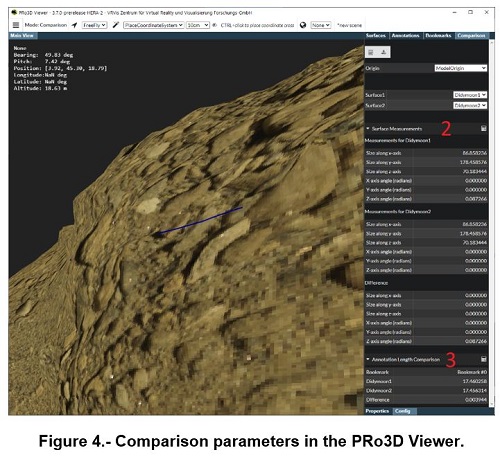
For reconstruction evaluation, the resulting 3D model must be compared to the initial one used for images simulation. PRo3D [4] was extended to support the comparison of two 3D models by the following methods (Figure 4):
- Visual comparison by toggling visibility of the superimposed models via keyboard
- Calculation of differences between the size along, and rotation of, local coordinate axes
- Calculation of distances along the surfaces projected from bookmarked locations between selected landmarks
- Calculation of various statistical parameters of the vertices of both models within a selected area (planned)
Conclusion
The Austrian contribution to Phase B2 Part 2 of the HERA project can be seen as continuation of Part 1 with focus on the further development of PRo3D and ColMap tools to fulfil requirements for Ground Navigation Support and for the evaluation of the 3D-reconstruction of small bodies (asteroids) in space exploration projects.
[1] – Pellacani, Graziano, et al (2019). HERA vision based GNC and autonomy. 8th European Conference for Aeronautics and Space Sciences (EUCASS).
[2] – Piluca Caballo, Rebecca Nowak, et al. Didymos images´ simulation for 3D reconstruction within HERA project, Europlanet Science Congress 2020, online, 21 September–9 Oct 2020, EPSC2020-123, https://doi.org/10.5194/epsc2020-123, 2020.
[3] – Piluca Caballo, Rebecca Nowak, et al. Imaging Simulations of HERA Didymos Approach. Mission & Campaign Design. Abstract and E-poster at 7th IAA Planetary Defense Conference. Online Event. 26th- 30th April 2021.
[4] – Barnes, Sanjeev, Traxler, et al (2018). Geological analysis of Martian rover-derived Digital Outcrop Models using the 3D visualization tool, Planetary Robotics 3D Viewer - Pro3D. In Planetary Mapping: Methods, Tools for Scientific Analysis and Exploration.
[5] – Paar, Deen, et al. (2016). Vision and image processing. In Contemporary Planetary Robotics: An Approach Toward Autonomous Systems, John Wiley & Sons.
[6] – Brunnhuber, May, et al (2017). Using Different Data Sources for New Findings in Visualization of Highly Detailed Urban Data. REAL CORP 2017 Proceedings.
[7] – Johannes L. Schönberger. ColMap tool. https://colmap.github.io/ Accessed 2021-05-21.
How to cite: Caballo Perucha, M. P., Nowak, R., Hafner, P., Kup, D., Klopschitz, M., Pellacani, A., Fritz, L., Paar, G., and Traxler, C.: AFC HERA simulated images along COP trajectory for Ground Navigation support and Dimorphos 3D reconstruction, Europlanet Science Congress 2021, online, 13–24 Sep 2021, EPSC2021-73, https://doi.org/10.5194/epsc2021-73, 2021.