
ExoMars 2022 Rover Science Operations Preparations
 1,
1,- 1ESA, ESTEC, Noordwijk, The Netherlands (e.sefton-nash@cosmos.esa.int)
- 2ESA, ESOC, Darmstadt, Germany
- 3ESA, ESAC, Madrid, Spain
1. Introduction
The ESA-Roscosmos ExoMars 2022 Mission [1] will deliver the Rosalind Franklin Rover and Kazachock Surface Platform to the Oxia Planum landing site on Mars [2, 3]. The launch window opens on 20 September 2022 with a corresponding Mars arrival on 10 June 2023. The Rover’s mission objectives are to search for signs of life and characterise the shallow subsurface. During its 211 sol nominal mission ‘Rosalind Franklin’ will accomplish its objectives using its ‘Pasteur’ Payload of 9 instruments, plus a drilling system capable of extracting samples from down to 2m for analysis.
2. Mission Status
Tests and reviews to confirm overall spacecraft readiness are proceeding, including a campaign of High Altitude Drop Tests (HADTs) on the parachute system. Activities at the Rover Operations Control Centre (ROCC) —located at ALTEC, Turin (IT)— are ramping up. Software systems used during the mission for planning are being tested and refined, and the Control and Science Teams are working together to train for the day-to-day operations environment.
3. Spacecraft Control
The ROCC can be considered an Activity Plan factory for the Rosalind Franklin rover. The ROCC is designed to support ESOC (European Space Operations Centre) during the launch, LEOP (Launch and Early Orbit Phase), when conducting periodic checkouts of the rover and instruments in interplanetary cruise, and to perform rover mission operations on Mars. A partner facility in Moscow, the Surface Platform Payload Operations Control Centre (SPOCC), controls the Kazachok Surface Platform.
The Science Team and the rover Control Team work together at the ROCC (including by remote connection) to conduct two parallel and connected processes. The Strategic process, performed during office hours, is the top-level process to plan rover activities. It proceeds via daily structured work and meetings. Strategic planning aims to achieve the rover mission objectives and maximize scientific return, and it is dynamic; adjusting to new scientific findings and interpretations. Strategic planning is done on 3 timescales: short term (next sol), medium term (within the current mission phase), and long-term (the next major mission phase plus objectives that could be addressed further in the future).
The Tactical process is the sequence of events triggered by the downlink of rover data to ROCC following an orbiter pass. It ends with uplink of validated activity plans to the rover for execution. Tactical planning is done on a schedule synchronised with downlink and uplink via Mars orbiters.
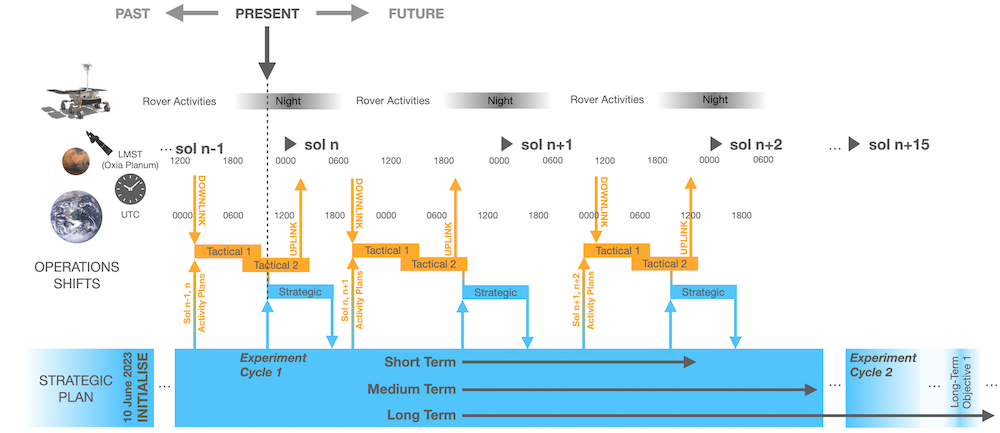
Figure 1: Illustration of scheduling strategic and tactical processes.
4. Strategic Plan
The Strategic Plan provides traceability from the top-level mission science objectives to individual rover activities. It provides the scientific context and background for how the mission science is organised. The Rover Science Operations Working Group (RSOWG) is building the Strategic Plan for the rover via 3 main tasks:
- Define scientific questions elaborated from the mission objectives.
- From these questions, construct corresponding hypotheses that are testable by rover instruments at the Oxia Planum landing site.
- Prepare preliminary instrument command sequences and potential targets to test the hypotheses.
Upon landing, the Strategic Plan will be ‘initialised’ at the landing point by the Science Team. They will interpret new data, assess locations to perform initial activities, and set long-term objectives.
5. Science Targets
The ‘Science Target Scheme’ has been conceived for use in daily science operations in order to harmonize the description of the places and features observed by the Rosalind Franklin rover during the mission, and the links between them. It is integrated into software tools running at the ROCC, and the data submitted to ESA’s Planetary Science Archive (PSA). It is a hierarchical schema of 10 classes representing objects at spatial scales relevant to Rover science, from areas identified in orbital data, down to spots on crushed samples analysed by instruments in the Rovers’ Analytical Laboratory Drawer, ALD [see 1]. A concept showing use of several target types used during the Post-Landing-To-Egress (PLTE) mission phase is shown in Figure 2.
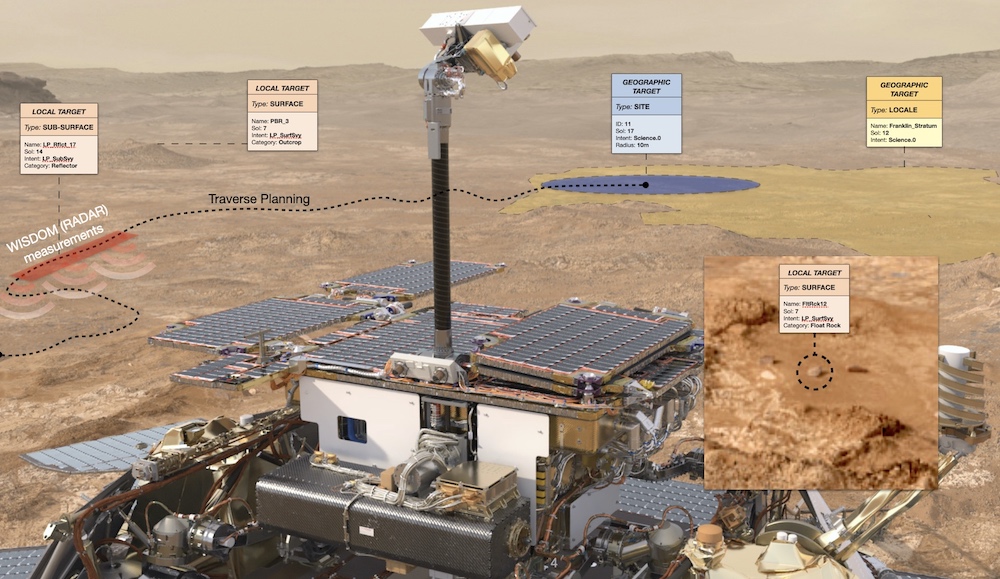
Figure 2: Concept for use of science targets in the PLTE mission phase (expected to last ~10 sols).
6. Team Simulations
During 2021-2023 a programme of simulations is being performed for training and certification of the team for operations. A subset of simulations in the programme are planned and run by the RSOWG. These allow the Science Team to test and refine their processes, for example to perform decision-making in the time-limited operations environment, and to rehearse several designated roles (e.g. Journal Keeper, Long Term Planner). RSOWG simulations are planned by a dedicated Simulations Planning Group composed of science, project and industrial team representatives. They use inputs from all Rover instrument teams, and lessons learned from analogue campaigns [e.g. 4] and other information, to design the scenarios determined to be most fruitful for maturing scientific processes.
7. ‘Micro’ and ‘Macro’ working groups
The RSOWG has chartered the ‘Micro’ and ‘Macro’ sub-working groups with a broad mandate to prepare for and optimise aspects of science operations at those spatial scales. For example, the Micro group works on the protocol for assessment of sample analyses, and builds knowledge of sample types using terrestrial analogues. While the Macro group, for example, provides a detailed morphostratigraphic map of the landing site as input to building the strategic plan [5], and prepares the geospatial data layers used in operations. Both groups also work together on important topics that span orbital to sample spatial scales, such as interpreting orbital spectroscopic and geomorphological data to set and refine mineralogical expectations for mission samples.
Acknowledgements
The authors wish to sincerely thank the ExoMars 2022 Science Team and Industrial Teams for their continuing tireless efforts to ensure readiness for operations.
References
[1] Vago, J. L. et al., (2017) Astrobiology 17 (6–7), 471–510, doi:10.1089/ast.2016.1533
[2] Quantin-Nataf, C. et al., (2021) Astrobiology 21 (3), doi:10.1089/ast.2019.2191
[3] Mandon, L. et al., (2021), Astrobiology 21 (4), doi:10.1089/ast.2020.2292.
[4] Balme, M. R. et al., (2019) Planet. Space Sci. 165, 31–5.
[5] Sefton-Nash, E. et al., (2021) in LPSC 52, #1947.
How to cite: Sefton-Nash, E., Vago, J. L., Joudrier, L., Haessig, F., Williams, A., Mitschdoerfer, P., Koschny, D., Lim, T., Toni, A., Fonteyne, R., Orgel, C., and Bahia, R.: ExoMars 2022 Rover Science Operations Preparations, European Planetary Science Congress 2021, online, 13–24 Sep 2021, EPSC2021-773, https://doi.org/10.5194/epsc2021-773, 2021.