
 1,3,
1,3,- 1International Lunar Exploration Working Group (ILEWG), EuroMoonMars, Free University Amsterdam (VUA), Leiden Observatory
- 2Technological University Dublin, Dublin, Ireland
- 3EuroMoonMars Poland 2021 campaign EMMPOL 3-4
- 4Institut Polytechnique des Sciences Avancées, Toulouse, France
REMMI, Rover for EuroMoonMars Investigations has been built at EMMIHS campaign in HI-SEAS Hawaii in 2019 and teleoperated locally and from The Netherlands. For EuroMoonMars 2021 projects, a number of scientific experiments were carried out with the REMMI rover. These experiments were based primarily on teleoperation of the REMMI rover and its mobility system. The rover’s mobility system is based on a continuous track system. It was discovered through experimentation that these tracks are suitable for a number of environments but unsuitable for others. When testing was done in the Analog Astronaut Training Center in Poland, the rover showed that it had difficulty getting a grip on metal surfaces. However, through testing in other outdoor facilities, it was observed that the rover had greater grip on sandy surfaces, grass surfaces and rocks. There was, however, a number of issues with these surfaces. On grass and rock surfaces, small debris would often interfere with the gears of the rover and would prevent movement. The solution to this would be to have a covering to shield the mobility system from both smaller debris and in future, lunar regolith. The rover also had issues with large slopes and inclines. Overall, it was discovered that the REMMI rover was more of a support rover than an exploration rover.
The REMMI rover also has a camera on it to allow for remote operation. This camera unlocks a number of future possibilities. Firstly, it will allow the rover to take pictures of samples and areas which the astronaut may want to collect or explore. This is a great feature for the astronaut as they will not have to waste oxygen and resources during an EVA searching for samples. The REMMI rover’s camera also unlocks the possibility to use artificial intelligence to recognise different features of the environment. Similar to self-driving cars, it would theoretically be possible to allow the rover to recognise features of the landscape which would show dangerous terrain for the rover or perhaps a new area to discover. The possibilities will be further tested in July 2021 on Mt Etna, Italy.
Acknowledgements: The authors would like to thank the Analog Astronaut Training Center and Dr. Kołodziejczyk for allowing the REMMI rover to be tested in their facilities and for their support throughout. The authors would also like to thank ILEWG EuroMoonMars for providing the REMMI rover for testing.
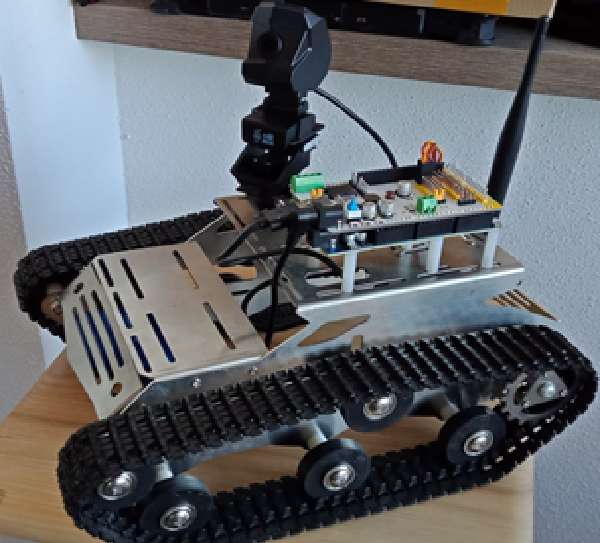
Figure 1: REMMI rover showing continuous track system and manoeuvrable camera.
How to cite: Mohan, C., Foing, B., and Charasse, M.-A.: Rover testing for lunar science and innovation, Europlanet Science Congress 2021, online, 13–24 Sep 2021, EPSC2021-850, https://doi.org/10.5194/epsc2021-850, 2021.