
What is that? Identification confidence of Mars analog habitats with Deep Learning

- Johns Hopkins Applied Physics Laboratory, United States of America (michael.phillips@jhuapl.edu)
Introduction
If life ever existed on Mars, its presence on the surface was likely relegated to spatially isolated patches [c.f., Phillips et al. this conference]. It follows that finding evidence for past life on Mars will require careful selection of rover-explorable targets that are most likely to have hosted organisms at or near the surface and retained evidence of those organisms. The salt habitats of paleo-lake basins [1], [2] are examples of habitats with taphonomic windows [3], [4], and as such are high priority targets for astrobiological exploration [c.f,. Phillips et al. this conference]. Salt-encrusted paleo-lake basins on Mars [5]–[7] may contain features that in similar environments on Earth serve as habitats; however, the spatial resolution necessary to detect these features is relatively unknown [8]. Here, we show how deep-learning can be used to understand spatial resolution thresholds for the identification of habitats and apply this method to the habitats in a terrestrial salt-encrusted paleo lake basin (salar), Salar de Pajonales.
Geologic Background
Salar de Pajonales, Chile (SdP, 25°08’29”S, 68°46’20”W, 3547 m, Fig. 1) lies within the Altiplano Puna plateau near the border of the Atacama Desert (hereafter, Altiplano and Atacama, respectively). Salt-encrusted basins in the Atacama and Altiplano experience multiple extreme conditions, including aridity/hyper-aridity [9], intense UV irradiation [10], severe diurnal temperature swings, high evaporation rates [9], and high concentrations of salt, which make them suitable environmental analogs to the salt-encrusted basins of Mars. The surface of SdP hosts regions locally dominated by gypsum and carbonate [11]. Data for our study was collected from a gypsum-dominated area of the salar, designated the “Dome Field” for its many domical gypsum structures [2]. [12] show that microbial (chasmo)endoliths preferentially reside in alabaster habitats within decimeter- to meter-tall domes and ridges [c.f., Phillips et al. this conference].
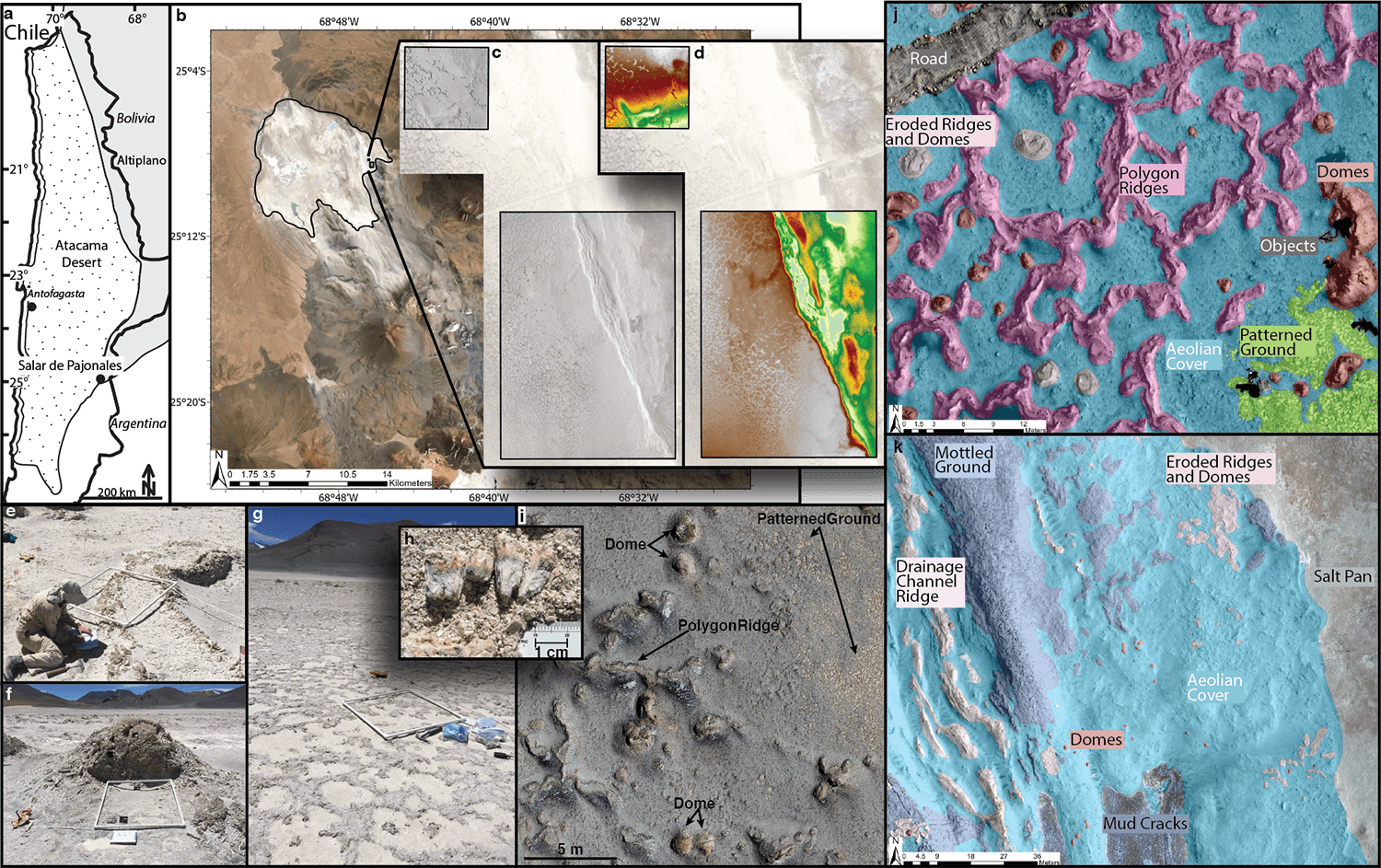
Fig. 1 Overview of Salar de Pajonales (SdP). A) Location of SdP within the Chilean Atacama Desert. B) Outline of SdP, note volcano to its south. C+D) Orthophotomosaic and DEM of the Dome Field generated with drone-collected images. E, F, G) Ridge, Dome, and Patterned Ground (biological soil crust) habitast at SdP, respectively. H) Pink and green horizons show endolithic microbial communities. I) Aerial view of Domes, Ridges, and Patterned Ground (biological soil crust) at SdP. J+K) Human-mapped ground truth classifications of the 12 feature classes in our study site.
Methods
We assessed the confidence with which habitats at SdP (polygon ridges, domes, and patterned ground) could be identified over a series of spatial resolutions with a methodology based on fully convolutional neural networks (FCNs, [13]). An FCN is a convolutional neural network with at least one fully-connected layer that adapts it to the semantic segmentation task. A “Confidence Score” was formulated to represent the degree to which one should trust FCN predictions [8]. The Confidence Score takes into account the correct and incorrect predictions made by the network, as well as the certainty (calculated using the Monte-Carlo Dropout method, [14]) associated with each prediction. BF-Score, precision, and recall were also calculated.
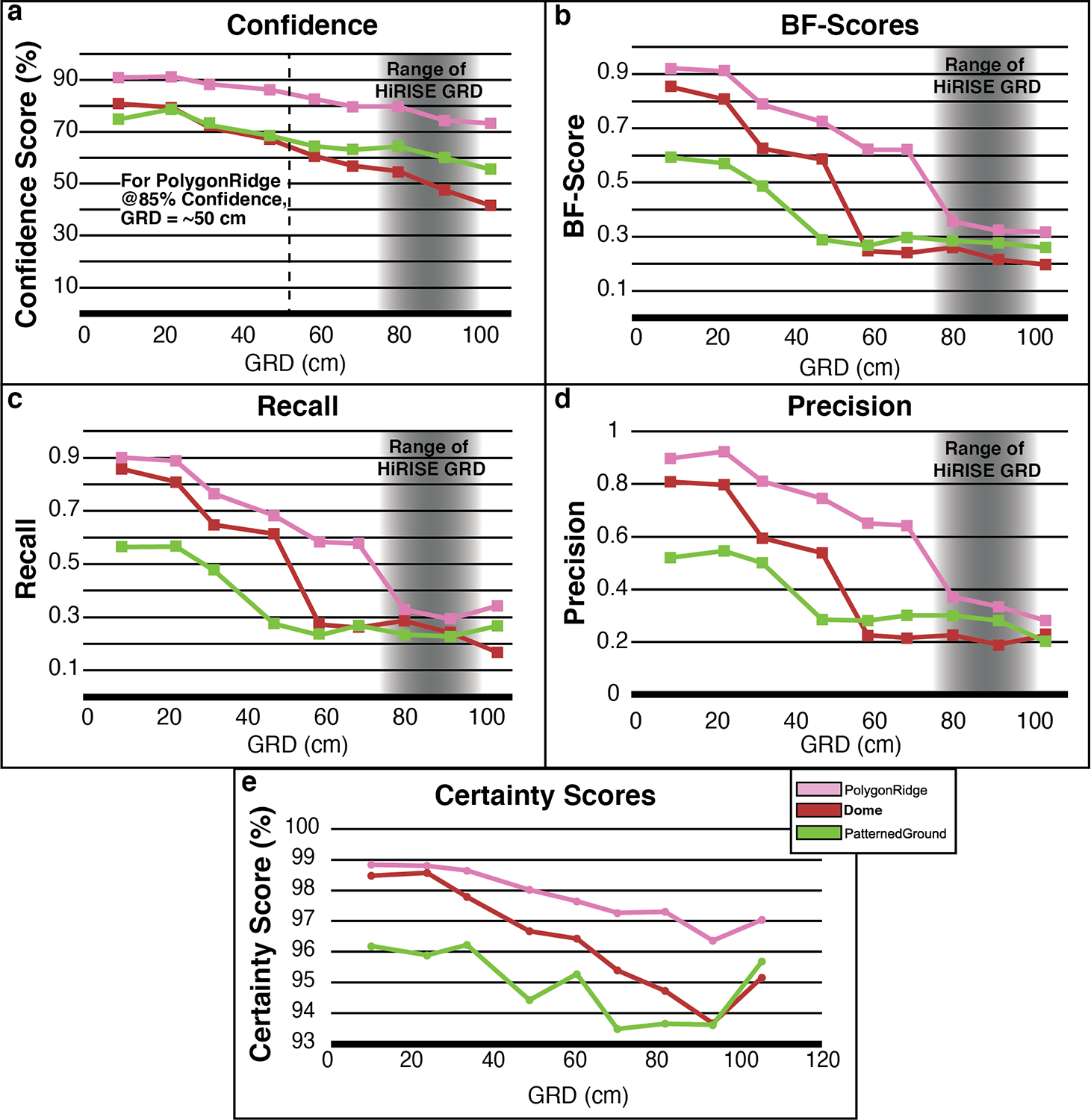
Fig. 2 Results as a function of Ground Resolved Distance (GRD). A) Confidence Score. B) BF-Score. C) Recall. D) Precision. E) Certainty. Gray region represents the approximate range of spatial resolutions achievable with HiRISE.
Results
The general characteristics of Precision, Recall, and BF-Score values as a function of image spatial resolution were relatively consistent between the habitats evaluated (Fig. 2b-d). We interpret the sharp drops in Precision, Recall, and BF-Score to mean that a spatial threshold critical for accurately segmenting (i.e., drawing a boundary around) a feature has been crossed. The threshold occurs at a GRD ~one-third the characteristic length scale of each feature, i.e., when the feature is spanned by 9 to 12 pixels. An analogy can be made to the Nyquist sampling frequency, wherein 2 to 3 pixels are required for a feature to be detected in an image. To achieve a 1-sigma level of identification confidence (Confidence Score ≥~85%) for the PolygonRidge class, a GRD approximately 20% its length scale is required, that is, it must be spanned by 15 to 20 pixels, or 5 to 10 times more pixels than is required to detect the feature. Conversely, Domes require a GRD ~6% their characteristic length scale (spanned by 50 to 65 pixels, or 17 to 33 times its detection limit) to be identified at the 1-sigma confidence level. PatternedGround could not be identified at the 1-sigma confidence level with the spatial resolutions studied here. This pattern suggests an intuitive hierarchy of recognition:
- detection: at 2-3 pixels, it is known that a feature exists
- segmentation: at 9-12 pixels, a boundary can be drawn around the feature
- identification: at ≥ 15 pixels, a class name can be accurately assigned to the feature.
These results emphasize the complexity and feature-specific nature of establishing identification thresholds in spatial resolution, and show that assuming the identifiability of a feature based only on its size may lead to overconfidence in the ability to identify it (e.g., the Dome class).Extending this work to establish the most- and least-identifiable habitats within presently-available images of Mars would be key for triaging habitats into a prioritized list of astrobiology targets and for informing future instrument specification requirements.
References:
[1] A. F. Davila et al., 2008. doi: 10.1029/2007JG000561.
[2] N. W. Hinman et al., 2022, https://www.frontiersin.org/article/10.3389/fspas.2021.797591
[3] R. E. Summons et al., Astrobiology, vol. 11, no. 2. p. 157, 2011.
[4] D. C. Fernández‐Remolar et al., 2013. doi: 10.1002/jgrg.20059.
[5] M. M. Osterloo et al., 2008. doi: 10.1126/science.1150690.
[6] T. D. Glotch, et al., 2016. doi: 10.1002/2015JE004921.
[7] E. K. Leask and B. L. Ehlmann, 2022, doi: 10.1029/2021AV000534.
[8] M. S. Phillips et al., Astrobiology, in review.
[9] J. Houston and A. J. Hartley, 2003. doi: 10.1002/joc.938.
[10] D. Häder and N. A. Cabrol, 2020. doi: 10.1111/php.13276.
[11] C. Rodríguez-Albornoz, Thesis, Universidad Católica del Norte, 2018.
[12] K. Warren-Rhodes et al., Nature Astronomy. in review.
[13] E. Shelhamer, et al., arXiv:1605.06211. p. tran, 2016.
[14] Y. Gal and Z. Ghahramani, ArXiv, vol. abs/1506.02142. 2016.
[15] B. L. Carrier et al., 2020. doi: 10.1089/ast.2020.2237.
[16] B. L. Ehlmann et al., 2016. doi: 10.1002/2016JE005134.
[17] T. C. Onstott et al., 2019. doi: 10.1089/ast.2018.1960.
[18] L. Hays, “NASA Astrobiology Strategy.” 2015.
How to cite: Phillips, M.: What is that? Identification confidence of Mars analog habitats with Deep Learning , Europlanet Science Congress 2022, Granada, Spain, 18–23 Sep 2022, EPSC2022-1200, https://doi.org/10.5194/epsc2022-1200, 2022.