
 1,1,1,1,
1,1,1,1,- 1Freie Universität Berlin, Department of Earth Sciences, Institute of Geological Sciences, Planetary Sciences Working Group, Berlin, Germany (sebastian.walter@fu-berlin.de)
- 2School of Earth and Space Exploration, Arizona State University, Tempe, AZ 85281, USA
Direct link to the interactive map: https://maps.planet.fu-berlin.de/jezero
Introduction: We welcome you to explore the landing site of the Mars 2020 Perseverance rover in an interactive hiking map loaded with orbital imagery, terrain data and virtual 3D panoramic views of Jezero crater and its surrounding area! The map allows fast zooming and panning for the exploration of the available data in several magnitudes of scale levels from far away until centimeter detail. It also seamlessly integrates several waypoints with pre-rendered virtual 360° panoramas and several real panoramas each stitched together from a multitude of single images of the MastcamZ instrument.
System Design: The general architecture follows the principles used for the HRSC Mapserver [1], see Figure 1. In contrast to the Mapserver’s intended use as a science-based data-portal and dissemination platform, the Jezero map was also planned as an public outreach application. But it serves as the first prototype of a next-generation infrastructure for disseminating upcoming data products from Freie Universität. Major parts of the existing set-up could be re-used but had to be updated. The layer menu had to be completely re-designed as it was implemented statically and hard-wired into the main code, which made it impossible to maintain and update its module dependencies. The most fundamental changes to the HRSC Mapserver are:
- Integrated A-Frame panoramic views, enabled switching between map views and 3D/VR/AR scenes
- Sidebar element for improved user experience on mobile devices and small screens, by Tobias Bieniek (https://github.com/Turbo87/sidebar-v2)
- LayerSwitcher element integrated into the sidebar, by Matt Walker (https://github.com/walkermatt/ol-layerswitcher)
- Transition from OpenLayers 3 to OpenLayers 5 involving a major migration from the underlying Google™ Closure compiler infrastructure to ES-based modules
- Usage of the Parcel packager to bundle the application for production
- IAU2015-based Mars spatial reference system as the base reference

Figure 1: Flow chart of the web-GIS application’s general system design outlining front-end (client) and back-end (server) components.
Data: The base layer of the customized map consists of a merged data-set from three different instruments. The Mars Express High-Resolution Stereo Camera (HRSC, [2]) Mars-Chart 30 data [3] are used as reference data-sets providing the geodetically controlled topography base and the seamless base imagery covering the complete landing site. 33 single images of the Mars Reconnaissance Orbiter (MRO) Context Camera (CTX, [4]), empirically corrected for their inherent ”smile” effect and bundle-adjusted with absolute geodetic control to the HMC-13E tile [5]. The single CTX images have then been radiometrically normalized using the HMC13 tile as brightness reference with the well-established methods from [6], re-implemented and adapted to CTX. To provide the orbital image data from the landing site in the highest available detail, we included image and topography data from the MRO High Resolution Imaging Science Experiment (HiRISE, [7]). We use the ortho-rectified image mosaic provided by the Terrain Relative Navigation (TRN) team of the JetPropulsion Laboratory (JPL) [8], which provided sufficient alignment to the underlying CTX and HRSC reference data. All three data-sets have been colourised by the HRSC color channels using pan-sharpening techniques and logarithmically stretched to Byte format.
Outlook: The new web-GIS client presented here will also serve as the prototype for the re-design of the HRSC Mapserver for data dissemination and download. Its unique features for single image visualization and download will be re-implemented and integrated into the new design. It will serve more image data products for time-series analysis and vizualitation, mainly the complete co-registered set of CTX images.
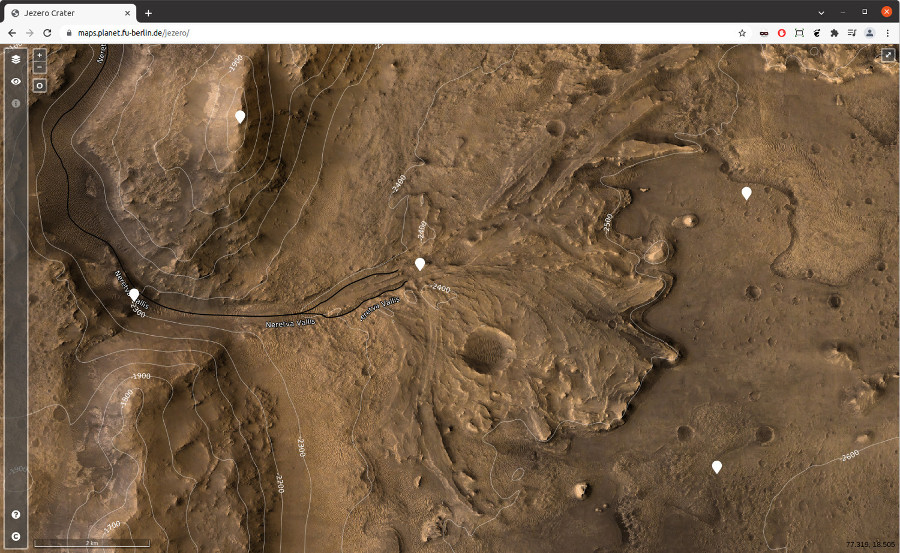
Figure 2: Jezero front-end showing the inflow-channel Neretva vallesJezero delta as a map frame. The droplet icons are clickable and switch the interface from the web-based view to the 3D-virtual panorama view as seen in Figure 3.

Figure 3: Jezero front-end showing the 3D-virtual panorama view of the ”Pliva Vallis” outflow channel. The underlying A-Frame library allows 360 degree-orientation in 3D or VR.
Acknowledgements: This work is supported by theGerman Space Agency (DLR Bonn), grant 50OO2204, on behalf of the German Federal Ministry for Economic Affairs and Climate Action.
References: [1] S.H.G. Walter et al., ESS 7 (2018). [2] R. Jaumann et al., PSS 55 (2007). [3] K. Gwinner et al., PSS 126 (2016). [4] M. C. Malin et al., JGR Planets (2007). [5] A. Neesemann et al., LPSC 52, 2021, #2509. [6] G. Michael et al., PSS 121 (2016). [7] A. S. McEwen et al., JGR Planets (2007). [8] R. L. Fergason et al., LPSC 51, 2020, #2020.
How to cite: Walter, S., Gross, C., Neesemann, A., Munteanu, R., Jaumann, R., Postberg, F., and Bell, J.: An Interactive Virtual Hiking Map for Jezero Crater, the Mars 2020 Perseverance Rover Landing Site, Europlanet Science Congress 2022, Granada, Spain, 18–23 Sep 2022, EPSC2022-32, https://doi.org/10.5194/epsc2022-32, 2022.