
 6
6- 1Max Planck Institute for Solar System Research, Göttingen, Germany (bambach@mps.mpg.de)
- 2ETH Zurich, Switzerland
- 3OHB Germany
- 4Space Acoustics, CH
- 5Uni Münster, Germany
- 6Open University, UK
Abstract
Mobile robotic surface platforms are critical for the exploration of the solar system. In the past, robotic ex-
plorers were limited by their abilities to navigate and traverse challenging terrain, such as boulder fields and
slopes steeper than 15°. The ESA topical team ’LEAP’ studies the feasibility of using an innovative loco-
motion system - a dynamically walking quadrupedal robot - to address challenging terrain and unlock hard-
to-reach, but high-reward scientific targets. Here, we present preliminary results of this assessment, includ-
ing 1) the selection of several promising science targets that are inaccessible by traditional means, 2) our
robotic platform, 3) a provisional payload suite that can address relevant science questions, and 4) sugges-
tions for future hard- and software developments.
Plain Language Summary
Geologically interesting sites, such as outcrops, slopes, and caves, are often difficult to access. The
ESA Topical team ’LEAP’ studies the feasibility of using an innovative locomotion platform - a legged
robot - to access such sites, potentially enabling unprecedented sampling and science opportunities. In
this work, we present our preliminary findings.
1. Mission scenario
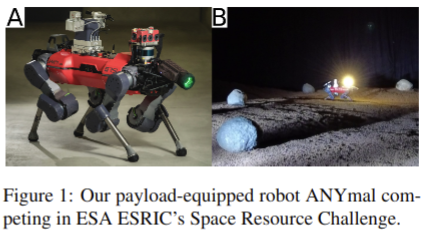
Triggered by ESA’s call for ideas(https://tinyurl.com/mrxn8f5u) on exploring the Moon with a large European lander (L3), we have
formed a topical team to assess the potential of an innovative robotic platform to provide access to
high-risk & high-reward targets on the moon(Fig. 1). ’LEAP’ (Legged Exploration of the
Aristarchus Plateau) is considering science targets on the Aristarchus plateau (AP).
AP is a geologically uniquely diverse region that hosts one of the highest
concentrations of volcanic features - including an irregular mare patch (IMP) and widespread evidence
for multiphased volcanism (Glotch et al., 2020). While our analysis of the plateau and the literature is
currently ongoing, we identified four geologic targets that appear to be inaccessible by traditional surface
assets, but could potentially enable transformational science: #1 the flank and peak of Herodotus Mons, #2
pits in Aristarchus’ IMP, #3 skylights and fractured terrain around Aristarchus crater’s central peak, and
#4 the bright outcrops at Cobra Head (Fig. 2a). The identified targets enable the study of a large
number of highly relevant science objectives, including many of ESA’s priority goals, such as: A) the
analysis of new and diverse (silicic, basaltic, and other) samples, B) the detection & characterization
of volatiles, C) deployment of geophysical instruments, D) the characterization of the lunar dust envi-
ronment, while E) demonstrating unprecedented surface mobility (ESA, 2019). Sites could be traversed
by one or multiple quadruped robots within one lunar day, starting from, for example, ESA’s L3(https://tinyurl.com/2p8vfd9n).

Legged locomotion systems are ideal to navigate difficult terrain on Mars or the Moon. They are less
likely to get stuck in loose regolith and can traverse slopes up to 25° or steeper, including large rocks
and other obstacles. LEAP uses the quadrupedal robot ANYmal (Hutter et al., 2017). ANYmal can
adapt its walking mode to different environmental conditions. These modes range from energy-efficient,
over traversing, to stabilized walking. The latter allows to satisfy measurement requirements of the
instruments. The traversing mode allows for 0.5 m/s to cross low-risk & low-interest areas efficiently.
ANYmal can use its limbs to manipulate the environment, including trenching and scraping. ANYmal’s
locomotion system proved its reliability in dusty environments as the joints need to only allow rotations of
up to 270° and are sealed against dust. The robot can recover and get back on its feet from any position and
is able to fall back to three- or even two-legged walking if one or two legs fail.
3. Instrumentation
The initial design has a payload mass budget of 15 kg and provides between 15 W to 100 W of
power, depending on the current thermal loads. For the (autonomous) operation of the robot, two baseline
instruments are used: lidars and cameras, which provide 3D information for navigation.
robot, such as a ground-penetrating radar, a gravimeter, neutron or mass spectrometers or a
sampling arm, & VIS/NIR/UV imager, and a Raman spectrometer. The current list of pay-
loads allows the robot to address a wide range of science questions related to geomorphology, mineralogy,
and petrography. We are currently refining the selection of payloads.
agreement 4000135310/21/NL/PA/pt.
How to cite: Bambach, P., Bickel, V., Kolvenbach, H., Valsecchi, G., Steininger, H., Eaton, N., Hiesinger, H., and Patel, M.: LEAP - Legged Exploration of the Aristarchus Plateau, Europlanet Science Congress 2022, Granada, Spain, 18–23 Sep 2022, EPSC2022-856, https://doi.org/10.5194/epsc2022-856, 2022.