
Sailing the Martian Winds: Optimizing the Scientific Payload of the Tumbleweed Swarm
 ,
,- Team Tumbleweed, Delft, Netherlands (james@teamtumbleweed.eu)
Introduction
Current missions to the Martian surface are marked by the slow and expensive development of complex rover platforms. Although these missions have provided indispensable initial insights about Mars, the datasets are sparse in nature and coverage is limited to the vicinity of the landing sites. The Mars Sample Return campaign has drawn attention to the challenges of the current paradigm, which involves infrequent, high-risk missions based on high-cost platforms.
While Mars orbiter missions offer global coverage, remote measurements are fundamentally limited in resolution. Hence, a new approach is required to provide large datasets at high spatio-temporal resolution to characterise the surface effectively.
Mission Architecture
The Tumbleweed mission was conceived to accelerate the pace of surface exploration and data acquisition on Mars and to fill the capability gap that exists between orbital and conventional rover platforms. By leveraging an architecture based on a swarm of wind-driven Tumbleweeds, extreme terrains can be accessed at a reduced risk of mission failure.
The spheroidal rovers are five metres in diameter with a rigid outer shell and a stabilised inner structure. Sails will provide the motion with flexible solar cells supplying the power. The majority of the scientific payload will be housed in a pod, suspended one metre above the surface. Owing to the simplicity of the rover’s main construction and the use of passive propulsion, manufacturing and development costs can be scaled down considerably. The dispersion of the 90 folded rovers will happen while unfolding in the mid-martian atmosphere (Figure 1, stage 6). Once on the surface, the rovers will start the rolling stage with an intended duration of 90 days. During the rolling stage, the rovers will traverse across rough terrain, utilising the diurnal and katabatic winds to start and stop (Figure 1, stages 7 and 8). After sufficient dispersion, the rovers will transform into weather stations. This would result in the creation of a distributed sensor array spread across the surface of Mars, to provide holistic datasets of the Martian atmosphere for example (Figure 1, stages 9 and 10).
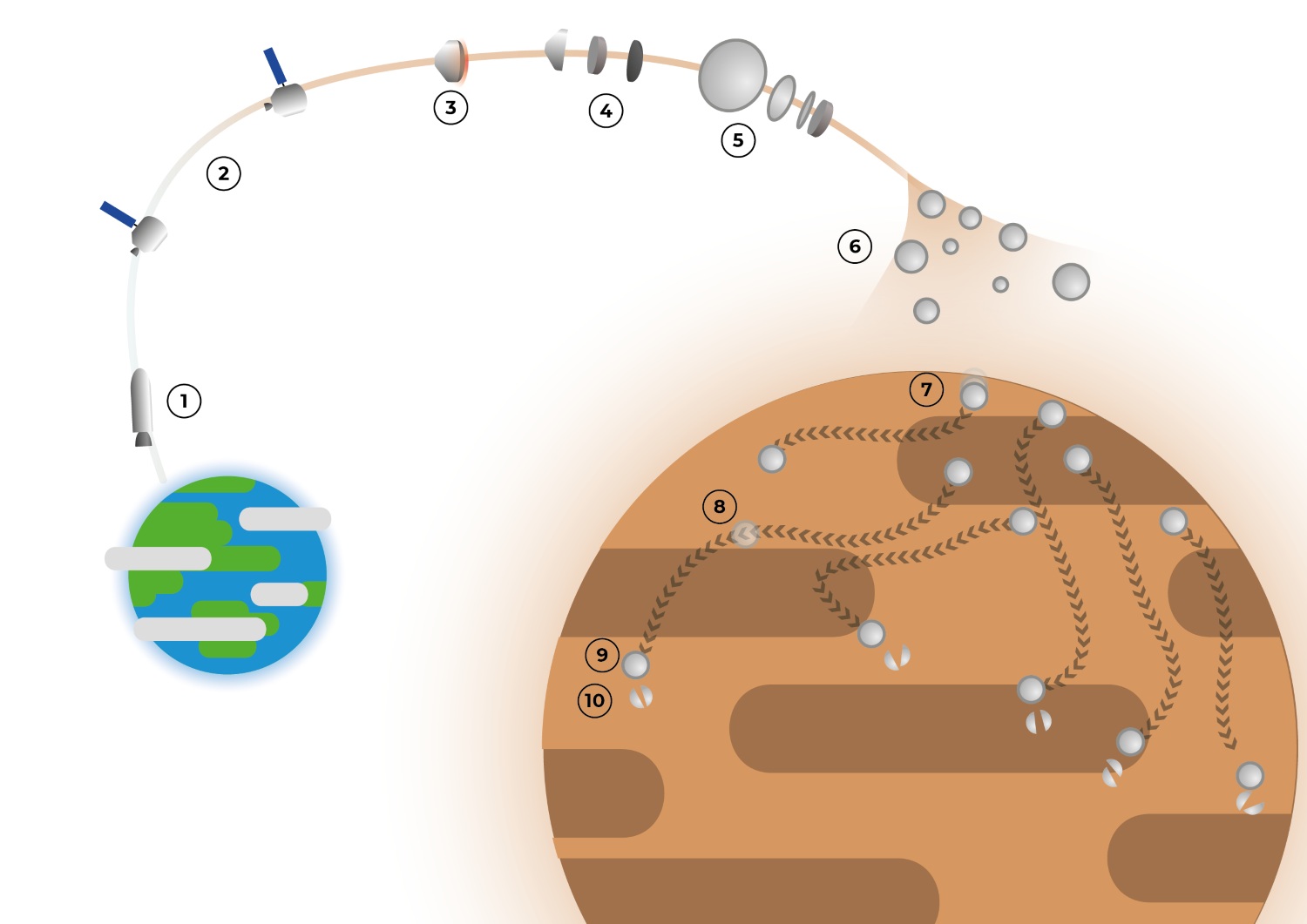
Figure 1: Schematic of the Tumbleweed mission architecture.
Optimizing Instrumentation
About fifty instruments that could address the previously determined open research questions on Mars were identified. Hence, we devised a methodology employing 7 modifiers (A-G) to score instruments based on their alignment with both mission requirements and research questions, enabling the selection of the most suitable instruments. These modifiers assign points for meeting specific criteria, with A, B, and C weighted as 3, 2, and 1 points respectively, considering primary, secondary, and tertiary data relevance. Additional scores (D-G), functioning as binaries, indicate other achievements such as the ability of instruments to produce quality data under a wide array of conditions (D) and whether having multiple rovers with the same instrument increases the value of the findings (E). Moreover, Criteria F is met when an instrument appears to have been used in scientific literature to tackle the same research question. Additionally, Criteria G is awarded when an instrument can perform its task without requiring the entire rover to momentarily stop moving.
Normalisation within each science case yields cumulative scores, representing the expected science return of each instrument.
To optimize instrument selection, we conceived the instrumentation trade-off as a 0-1 multidimensional knapsack problem, which is a special case of 0-1 Linear Programming. More specifically, our goal was to maximize the total science score of the selected instruments to be carried on the Tumbleweed payload, such that the selection does not surpass a total mass of 5 kilograms, a total volume of 6000 cubic centimetres and 20 watts of power consumption. Through performing mixed integer linear programming (MILP) algorithms and a brute force method the optimal set of instruments that maximise science return is shown below, discretised into scientific fields:
- Human Exploration - to identify candidate human exploration sites, based on both resources and scientific interest and deeply characterize them while also delivering a better understanding of potential hazards:
- Stereoscopic camera
- Neutron spectrometer
- Surface Geology - to discover and characterise Martian surface deposits, such as potential turbidite structures and glacier-like forms (GLFs), while also detecting surface compound materials.
- Hand-lens style imager
- Stereoscopic (multispectral) camera
- Interior Geology - to illuminate the remnant crustal magnetism found in the southern highlands of Mars.
- Triaxial fluxgate magnetometer
- Ionizing Radiation - to advance our knowledge of the ionizing radiation environment on Mars, through distributed monitoring of radiation exposure and particle spectra:
- Radiation spectrometer/particle camera
- Neutron spectrometer
- Atmospheric Science - to investigate lower atmosphere dynamics, thermal properties, water and CO2 distribution, surface-atmosphere interactions, and chemical species variability across diverse latitudinal gradients and temporal scales:
- Electric field sensor
- Wind sensor
- Dust sensor
- Pressure sensor
- Temperature sensor
- Soil pH sensor
- Relative humidity sensor
- Astrobiology - to uncover biosignatures ranging from textures to organic molecules and other CHNOPS-containing compounds, where contextual measurements of the surface geology and atmospheric quantities help identify potential zones of interest.
From the optimisations executed it became clear that peak power is the limiting factor when selecting instruments to maximise scientific return. A very large increase in power availability is required (365%) for it to be the non-dominant limiting factor in the optimisation. However, this peak power constraint assumes all instruments are operational simultaneously, where instruments may be idle when others are operational.
Feasibility Studies
The instruments devised above are further filtered by performing extensive feasibility studies. Each potential factor that can be detrimental to the viability of each science case is considered carefully and the most pertinent disturbing factors are simulated. Following this, mitigation strategies are discussed.
Conclusion
The Tumbleweed mission provides a new paradigm for Martian exploration, addressing key limitations of current in-situ missions and providing unprecedented insights into the Red Planet's geology, atmosphere, and potential for habitability. Through an instrumentation trade-off and optimisation, a set of instruments with maximal scientific return are selected for the Tumbleweed mission. Feasibility studies identify and mitigate the technical challenges of the diverse payloads. The findings presented here lay the foundation for further maturation of payload on the Tumbleweed rovers.
How to cite: Kingsnorth, J., Shanbhag, A., Balsemão, M., Bounova, G., Bonanno, L., Pikulić, L., Mikulskytė, O., and Rothenbuchner, J.: Sailing the Martian Winds: Optimizing the Scientific Payload of the Tumbleweed Swarm , Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1103, https://doi.org/10.5194/epsc2024-1103, 2024.