Multiple terms: term1 term2
red apples
returns results with all terms like:
Fructose levels in red and green apples
Precise match in quotes: "term1 term2"
"red apples"
returns results matching exactly like:
Anthocyanin biosynthesis in red apples
Exclude a term with -: term1 -term2
apples -red
returns results containing apples but not red:
Malic acid in green apples
hits for "" in
Network problems
Server timeout
Invalid search term
Too many requests
MITM1
Session assets
In the last 15 years the Payloads Department of INTA has developed a variety of compact sensors for different Mars exploration missions. This includes a magnetometer (72 g), a dust sensor (35 g; with UC3M, Spain) and a radiometer (114 g) for the MetNet penetrator [1]; a radiometer (25 g optical head, 56 g processor) for DREAMS (Schiaparelli) [2], [3]; a radiometer plus camera (1 kg) for MEDA on Perseverance [4], [5]; a 110 g dust sensor (with UC3M, Spain) [6] and a radiometer plus spectrometer (180 g) for the METEO package [7] on Kazachock lander (ExoMars’22) and a 0.5 kg nephelometer (with INAF and Politecnico di Milano, Italy) [8] for the Dust Complex on the same lander. Equally miniaturized sensors exist for the measurement of the most relevant environmental variables, such as radiative balance, air temperature, wind, humidity, pressure, dust saltation, electric field, etc. with enough flight heritage (or technology readiness level) on the same sensors’ suites on Perseverance and ExoMars, as well as Insight or Curiosity before [9].
In summary, a large portfolio of miniature sensors for environmental research is available at present. However, a qualitative leap on (in-situ) Mars climate science will only happen through the deployment of networks of environmental stations throughout large areas of the planet. Given the relevance of these measurement not only from a scientific point of view but also because of their importance for future human missions to Mars, this is an objective considered in several Mars exploration roadmaps such as ESA’s Terrae Novae 2030+ [10].
With this aim, we propose a microprobe named MarsConnect. It consists of a 10-12 kg probe with a rigid, deployable aeroshell/TPS and a 5-6 kg impactor/penetrator carrying up to 1 kg of environmental sensors. Many of these probes could be launched to Mars with a single carrier, to deploy meteorological networks. This works inherits different concepts from previous similar proposals, very specially MetNet and MiniPINS [11], but simplifying even more the EDL concept and reducing the mass, at the expense of an increased impact speed.
The probe’s aeroshell is divided into a backshell and two halves of a frontshield that are opened in the low supersonic regime to drop the penetrator. This one is equipped with a drag-skirt that provides some braking and increases stability. The expected impact speed, highly dependent on the atmospheric density profile, entry conditions and landing altitude, ranges from less than 100 to 140 m/s. The whole system is designed to be compatible with a wide range of scenarios and landing sites and is sized to endure more than one Martian year operating on the planet’s surface.
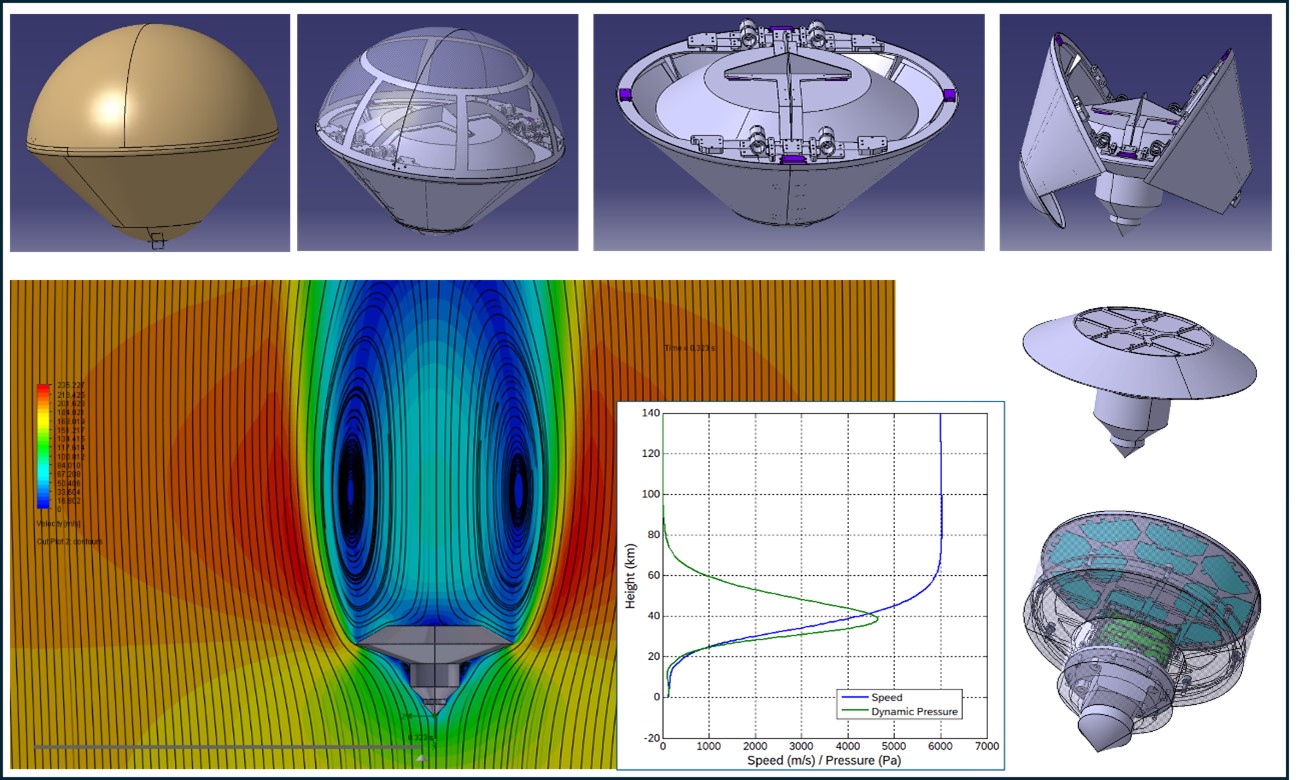
Fig. 1. CAD views of the MarsConnect probe and its eyectable aeroshell, plus some details of CFD and EDL analysis.
The present development status and short-term plans will be presented.
References: [1] Harri A-M et al. (2017), Geosci. Instrum. Method. Data Syst. 6, 103-124. [2] I. Arruego et al. (2017) Adv. in Space Res. 60 (2017). [3] F. Esposito et al. (2018) Space Sci. Rev. (2018) 214:103. [4] J.A. Rodríguez-Manfredi et al. (2021) Space Sci. Rev. 217:48. [5] V. Apéstigue et al., Sensors 2022, 22(8), 2907. [6] A. Russu et al. (2019) SPIE, Vol. 11129. [7] D. Rodionov et al., Vol. 12, EPSC2018-732. [8] D. Scaccabarozzi et al., 2019 IEEE MetroAeroSpace. [9] J. Gómez-Elvira et al., Space Sci. Rev., 2012, 170:583-640. [10] ESA, Nov.’21. [11] I. Arruego et al., LowCostMars2022.
How to cite: Arruego, I. and the MarsConnect team: Mars environmental networks through the MarsConnect microprobes, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-92, https://doi.org/10.5194/epsc2024-92, 2024.
The “Mars Magnetosphere ATmosphere Ionosphere and Space-weather SciencE (M-MATISSE)” mission is an ESA Medium class (M7) candidate currently in Phase A study by the European Space Agency (ESA) (Figure 1). M-MATISSE’s main scientific goal is to unravel the complex and dynamic couplings of the Martian Magnetosphere, Ionosphere and Thermosphere (M-I-T coupling) with relation to the Solar Wind (i.e. space weather) and the lower atmosphere, and the processes leading to this coupling, which are highly entangled between several regions of the system (Figure 2). The M-I-T coupling controls the dissipation of incoming energy from the solar wind, and therefore, the evolution of Mars’ atmosphere and climate (including atmospheric escape, auroral processes, and incoming radiation). Moreover, understanding the behavior of Mars’ M-I-T system and of the chain of processes that control Space Weather and Space Climate at Mars, as well as the radiation environment, is essential for exploration as it leads to accurate Space Weather forecasts and, thus, prevents hazardous situations for spacecraft and humans.
Figure 1: The “Mars Magnetosphere ATmosphere Ionosphere and Space-weather SciencE (M-MATISSE)” mission is an ESA Medium class (M7) candidate.
Mission goals: The mission has three main goals:
- Characterising the global dynamics of the M-I-T coupling by unravelling its temporal and spatial variabilities. This will be done with simultaneous observations of the solar wind (energy input) and ionosphere-magnetosphere (energy sink), and also, via investigating the coupling of the mesosphere with the ionosphere and solar energetic particles.
- Characterising the Radiation environment, by determining how the M-I-T absorbs the energy that reaches the planet and forecasting near-real time planetary Space Weather
- Characterising the Ionosphere-lower atmosphere coupling, which is a region barely explored but essential for solar energetic particles related phenomena as well as for communications in the HF wavelengths.
In addition, M-MATISSE will significantly contribute to understand Mars climate and the lower atmosphere as two remote instruments have dedicated instrumentation to monitor dust, clouds, and get temperature and density profiles from the surface up to about 50 km. Moreover, the heliophysics community will count with a full-package solar wind monitor at Mars’ distances, contributing to understand solar wind and solar transient propagation in the inner Solar System.
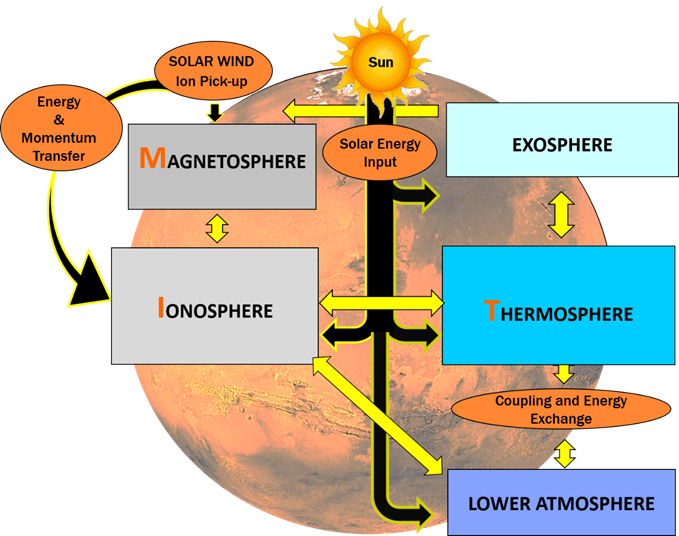
Figure 2: Mars regions that M-MATISSE will focus to understand the spatial-temporal variability of the M-I-T system and its couplings from the surface to space.
Type of Mission: M-MATISSE is one of the current three candidates in competition at ESA at the Medium-size opportunity in ESA's Science Programme from the call in December 2021. From 27 initial responses, ESA down-selected 5 missions in 2022, which went through a Phase 0 study. In that phase, ESA evaluated the expected science that could be achieved with each mission, as well as came up with a preliminary mission design. In November 2023, ESA further down-selected them to three, which are currently in Phase A studies. In this phase, each candidate mission will be studied in detail by ESA, involving European aerospace companies, national institutes, and universities, resulting in a more comprehensive design for each mission. Payload maturation activities are being performed in parallel including breadboarding and test. It is expected that one candidate mission will be chosen by mid-2026.
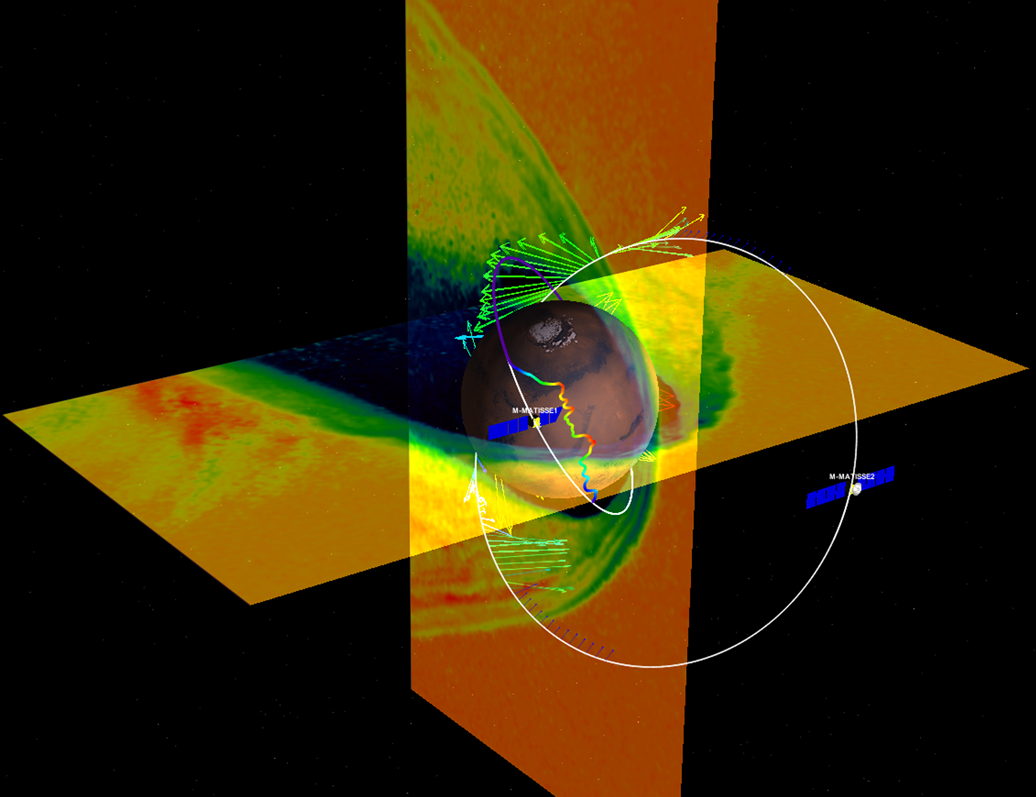
Figure 3: Simulation of the Martian plasma system and the two M-MATISSE spacecraft with their nominal orbits.
M-MATISSE mission concept: M-MATISSE consists of two orbiters with focused, tailored, high-heritage payloads to observe the plasma environment from the surface to space through coordinated simultaneous observations. It will utilize a unique multi-vantage point observational perspective, with the combination of in-situ measurements by both orbiters and remote observations of the lower atmosphere and ionosphere by radio crosstalk between them (Figure 3).
The fathership, called Henri, has a periapsis below 270 km and an apoapsis of 3000 km with an inclination of 60°, and is intended to spend most of its time within the Martian plasma system. The daughtership, called Marguerite, also has an inclination of 60°, a periapsis below 270 km and an apoapsis of 10,000 km, and is intended to spend most of its time in the solar wind and/or far tail of Mars (a region barely explored before).
M-MATISSE has a nominal mission duration of 1 Martian a year, and the launch date is identified for July 2037.
Consortium: M-MATISSE is the product of a large organized and experienced international consortium in which 15 different space agencies participate. M-MATISSE is a community-led mission, and a legacy concept from pioneer missions, such as Mars Express, Trace Gas Orbiter, MAVEN and experienced teams.
Take home message: M-MATISSE has the unique capability to track solar perturbations from the Solar Wind down to the surface, being the first mission fully dedicated to understand planetary space weather at Mars. It will revolutionize our understanding and ability to forecast potential global hazard situations at Mars, an essential precursor to any future robotic & human exploration.
Acknowledgments: We acknowledge the ESA M-MATISSE CDF team who supported the assessment phase until MDR and the ESA study team, who is managing the Phase A/B1 activities (point of contact robert.buchwald@esa.int). The Science Study Team is managed by Olivier Witasse as M-MATISSE study scientist.
How to cite: Sanchez-Cano, B. and Leblanc, F. and the The M-MATISSE team: The M-MATISSE mission: Mars Magnetosphere ATmosphere Ionosphere and Space weather SciencE. An ESA Medium class (M7) candidate in Phase-A. , Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-545, https://doi.org/10.5194/epsc2024-545, 2024.
In preparation for the human exploration of Mars, several orbital assets will need to be in place. ESA is exploring concepts for very-high-altitude platforms which will facilitate communications links to the Martian surface amongst other duties. Such platforms would have the capacity to monitor most of the Martian surface simultaneously, while also providing mission critical services including global navigation and Earth-Mars data relay. Part of a possible scientific payload will be instrumentation to monitor the Martian climate over the whole planet to enable future weather forecasting. These observations will eventually provide a better understanding of the formation and evolution of Martian dust storms, and therefore their prediction – which is critical for the safety of human exploration.
Here, we present the Broadband Exploration with Bolometric Optics (BEBOP) concept for these missions. This instrument is a thermal imaging system that combines a filter array with heritage from Mars Reconnaissance Orbiter’s Mars Climate Sounder (MCS; McCleese et al., 2007) and Lunar Reconnaissance Orbiter’s Lunar Diviner (Paige et al., 2010) with a fast, wide field of view, compact freeform optical system and uncooled microbolometer detector. The optical configuration, detector, and electronics have heritage from the Lunar Trailblazer Lunar Thermal Mapper (LTM; Shirley et al., 2020; Bowles et al., 2020) and Comet Interceptor’s Modular InfraRed Molecules and Ices Sensor (MIRMIS; Jones et al., 2024) instruments. Fig. 1 shows the completed LTM assembly, which was delivered in 2023 and is awaiting a November 2024 launch. The filter assembly will have 15-19 channels covering a spectral range of 6-25 μm, including the 15 μm CO2 feature. The instrument is compact, low mass and power, and does not require cryogenic cooling for the detectors. On-board time delay and integration (TDI) leads to high sensitivity and low noise. A scan mechanism and internal black-body target calibrates the entire optical chain between observations.

Fig. 1 The fully assembled LTM instrument, now mated to Lunar Diviner and ready for a November 2024 launch.
The spectral range of BEBOP and the necessarily wide field of view at high orbit will allow the measurement of atmospheric parameters across nearly the entire Martian disk. From MCS heritage, we will have spectral bands covering the 15 μm CO2 band, allowing the retrieval of temperature and pressure of the lower Martian atmosphere (Kleinböhl et al., 2009; Smith et al., 2022; Vlasov et al., 2023). To either side of this band, dust and water ice aerosol opacity can be retrieved, providing column opacities over the Martian disk. Other spectral channels that will be included will be thermal bands, providing Martian surface temperatures with high precision, and a series of mineralogical bands over the 7-10 μm region to determine crustal composition via Christiansen feature mapping. We will also be able to monitor surface ice and frost coverage, identify clouds and dust storms, trace the movement of clouds and dust, and extract wind fields. The ability to include a bandpass covering the emission and absorption of water vapour and other gases is under consideration.
Expected spatial resolution is 1.5-2.6 km from a 5700 km altitude orbit. The field of view extends across the entire Martian disc, additionally facilitating limb sounding to retrieve vertical profiles of temperature, pressure, dust extinction, water ice extinction, and possibly water vapour with a vertical resolution of ~5 km. With three spacecraft, this will be done pole-to-pole at six longitudes at high cadence, having nearly global coverage each Martian day. This will lead to a better understanding of the dust and water cycles on Mars, providing insights into contemporary and past climate. A key question is how do dust storms form and how do they transform into global events?
The instrument will also provide valuable information about the surface mineralogy, accessing longer wavelengths than contemporary instruments such as CRISM and OMEGA. This will allow us to address the crucial scientific question: what is the crustal history of Mars? The formation of the Martian crust was a complex process and the origins of its magmatic and volcanic content are unknown, and their study will lead to better understanding of the history and formation process of Mars and, therefore, Earth.
The 6-25 μm range includes emission peaks for silicate mineral Christiansen features and silicate minima within the Reststrahlen bands. These allow the differentiation between plagioclase, olivine, and pyroxene. The surface spectra will inform about mineralogy and help answer the outstanding question of whether phyllosilicates (Fe/Mg) are smectites or the intermediate material in the diagenetic sequence from smectite to chlorite, illite, and other higher-temperature clays.
How to cite: Olsen, K. S., Evans, R., Eshbaugh, H., Warren, T. J., Shirley, K. A., Nowicki, K., and Bowles, N. E.: Returning to Mars with BEBOP (Broadband Exploration with Bolometric Optics) , Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1093, https://doi.org/10.5194/epsc2024-1093, 2024.
Introduction
Current missions to the Martian surface are marked by the slow and expensive development of complex rover platforms. Although these missions have provided indispensable initial insights about Mars, the datasets are sparse in nature and coverage is limited to the vicinity of the landing sites. The Mars Sample Return campaign has drawn attention to the challenges of the current paradigm, which involves infrequent, high-risk missions based on high-cost platforms.
While Mars orbiter missions offer global coverage, remote measurements are fundamentally limited in resolution. Hence, a new approach is required to provide large datasets at high spatio-temporal resolution to characterise the surface effectively.
Mission Architecture
The Tumbleweed mission was conceived to accelerate the pace of surface exploration and data acquisition on Mars and to fill the capability gap that exists between orbital and conventional rover platforms. By leveraging an architecture based on a swarm of wind-driven Tumbleweeds, extreme terrains can be accessed at a reduced risk of mission failure.
The spheroidal rovers are five metres in diameter with a rigid outer shell and a stabilised inner structure. Sails will provide the motion with flexible solar cells supplying the power. The majority of the scientific payload will be housed in a pod, suspended one metre above the surface. Owing to the simplicity of the rover’s main construction and the use of passive propulsion, manufacturing and development costs can be scaled down considerably. The dispersion of the 90 folded rovers will happen while unfolding in the mid-martian atmosphere (Figure 1, stage 6). Once on the surface, the rovers will start the rolling stage with an intended duration of 90 days. During the rolling stage, the rovers will traverse across rough terrain, utilising the diurnal and katabatic winds to start and stop (Figure 1, stages 7 and 8). After sufficient dispersion, the rovers will transform into weather stations. This would result in the creation of a distributed sensor array spread across the surface of Mars, to provide holistic datasets of the Martian atmosphere for example (Figure 1, stages 9 and 10).
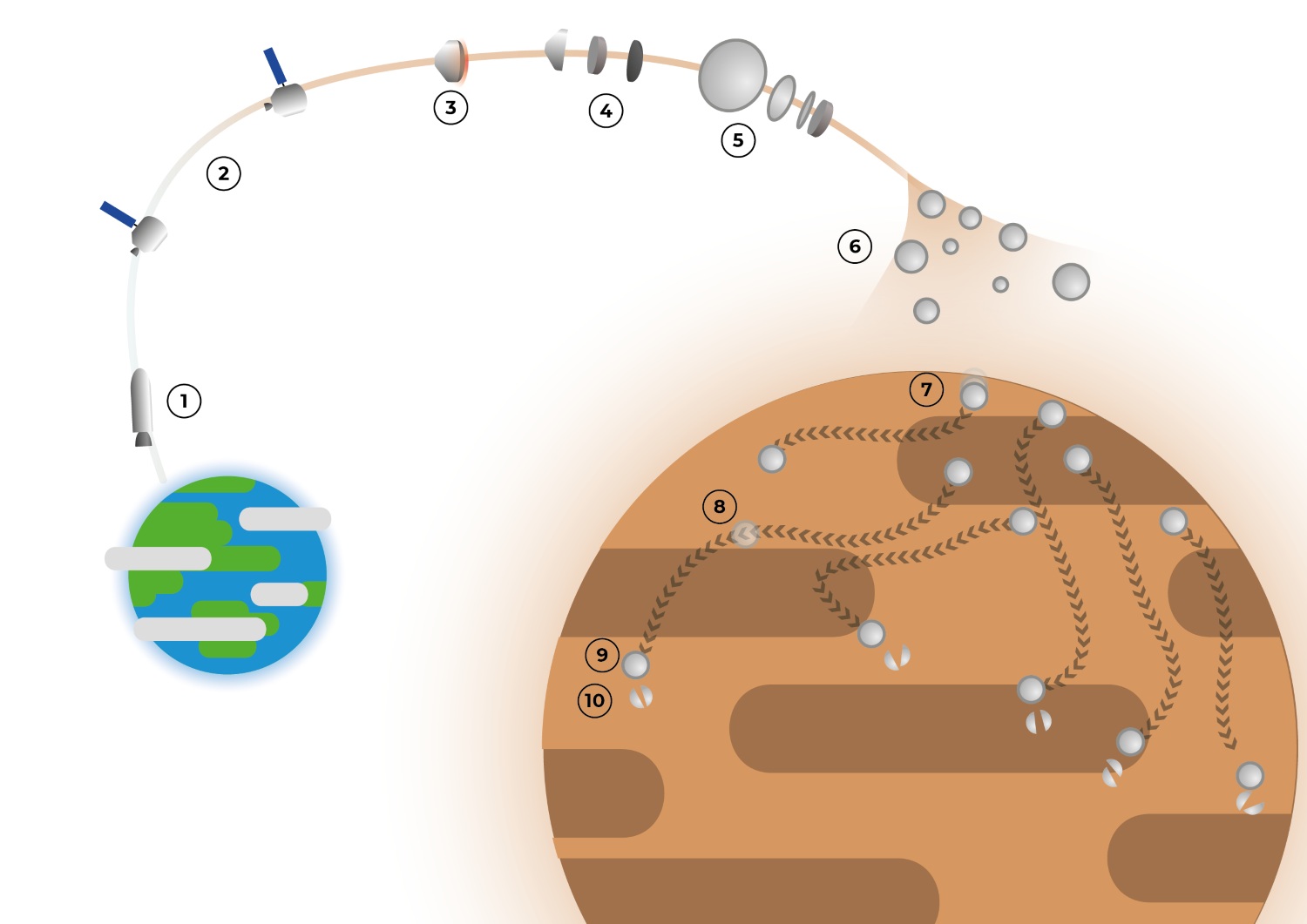
Figure 1: Schematic of the Tumbleweed mission architecture.
Optimizing Instrumentation
About fifty instruments that could address the previously determined open research questions on Mars were identified. Hence, we devised a methodology employing 7 modifiers (A-G) to score instruments based on their alignment with both mission requirements and research questions, enabling the selection of the most suitable instruments. These modifiers assign points for meeting specific criteria, with A, B, and C weighted as 3, 2, and 1 points respectively, considering primary, secondary, and tertiary data relevance. Additional scores (D-G), functioning as binaries, indicate other achievements such as the ability of instruments to produce quality data under a wide array of conditions (D) and whether having multiple rovers with the same instrument increases the value of the findings (E). Moreover, Criteria F is met when an instrument appears to have been used in scientific literature to tackle the same research question. Additionally, Criteria G is awarded when an instrument can perform its task without requiring the entire rover to momentarily stop moving.
Normalisation within each science case yields cumulative scores, representing the expected science return of each instrument.
To optimize instrument selection, we conceived the instrumentation trade-off as a 0-1 multidimensional knapsack problem, which is a special case of 0-1 Linear Programming. More specifically, our goal was to maximize the total science score of the selected instruments to be carried on the Tumbleweed payload, such that the selection does not surpass a total mass of 5 kilograms, a total volume of 6000 cubic centimetres and 20 watts of power consumption. Through performing mixed integer linear programming (MILP) algorithms and a brute force method the optimal set of instruments that maximise science return is shown below, discretised into scientific fields:
- Human Exploration - to identify candidate human exploration sites, based on both resources and scientific interest and deeply characterize them while also delivering a better understanding of potential hazards:
- Stereoscopic camera
- Neutron spectrometer
- Surface Geology - to discover and characterise Martian surface deposits, such as potential turbidite structures and glacier-like forms (GLFs), while also detecting surface compound materials.
- Hand-lens style imager
- Stereoscopic (multispectral) camera
- Interior Geology - to illuminate the remnant crustal magnetism found in the southern highlands of Mars.
- Triaxial fluxgate magnetometer
- Ionizing Radiation - to advance our knowledge of the ionizing radiation environment on Mars, through distributed monitoring of radiation exposure and particle spectra:
- Radiation spectrometer/particle camera
- Neutron spectrometer
- Atmospheric Science - to investigate lower atmosphere dynamics, thermal properties, water and CO2 distribution, surface-atmosphere interactions, and chemical species variability across diverse latitudinal gradients and temporal scales:
- Electric field sensor
- Wind sensor
- Dust sensor
- Pressure sensor
- Temperature sensor
- Soil pH sensor
- Relative humidity sensor
- Astrobiology - to uncover biosignatures ranging from textures to organic molecules and other CHNOPS-containing compounds, where contextual measurements of the surface geology and atmospheric quantities help identify potential zones of interest.
From the optimisations executed it became clear that peak power is the limiting factor when selecting instruments to maximise scientific return. A very large increase in power availability is required (365%) for it to be the non-dominant limiting factor in the optimisation. However, this peak power constraint assumes all instruments are operational simultaneously, where instruments may be idle when others are operational.
Feasibility Studies
The instruments devised above are further filtered by performing extensive feasibility studies. Each potential factor that can be detrimental to the viability of each science case is considered carefully and the most pertinent disturbing factors are simulated. Following this, mitigation strategies are discussed.
Conclusion
The Tumbleweed mission provides a new paradigm for Martian exploration, addressing key limitations of current in-situ missions and providing unprecedented insights into the Red Planet's geology, atmosphere, and potential for habitability. Through an instrumentation trade-off and optimisation, a set of instruments with maximal scientific return are selected for the Tumbleweed mission. Feasibility studies identify and mitigate the technical challenges of the diverse payloads. The findings presented here lay the foundation for further maturation of payload on the Tumbleweed rovers.
How to cite: Kingsnorth, J., Shanbhag, A., Balsemão, M., Bounova, G., Bonanno, L., Pikulić, L., Mikulskytė, O., and Rothenbuchner, J.: Sailing the Martian Winds: Optimizing the Scientific Payload of the Tumbleweed Swarm , Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1103, https://doi.org/10.5194/epsc2024-1103, 2024.
Polarization is a topic largely neglected in spectroscopic investigation of planetary science. While true the degree of polarization is small in many observational situations, one can show that it has incur some bias in recent retrieval studies. Looking towards the future, with more high-performance spectrometers being sent to other planets, we would argue that future spectrometers should consider addressing polarization early in their design.
Polarization of light commonly occurs dues to scattering by surfaces, aerosols (e.g. clouds), and molecules. The different polarization states of light entering the spectrometer instrument can have different transmission efficiencies to arrive at the detector, leading to a polarization sensitivity of the instrument. The combination of these two mechanisms leads to an incorrect calibration of radiances used for science retrievals. Especially when the target absorption features and the polarization features are correlated/anticorrelated, this leads to an unknown error in the retrieval. One can adapt their end-to-end tool to characterize this error and include it in the total error budget.
One can include other elements in their design to correct for, or measure, the polarization. The simplest method might be to include a polarization scrambler early in the optical path. This would nullify the polarization sensitivity of the instrument. Then the retrieval tool can ignore polarization in the forward model completely. Still, in some cases, the forward model including or not including polarization can lead to large difference in the total radiance entering the instrument due to missing terms in scattering. Therefore, including a scrambler can still lead to some retrieval error. We present some estimations of this bias from recent Mars missions.
Alternatively, one can use a combination of polarized filters and perform simultaneous (or near simultaneous) observations of the reflected radiance. By combining these spectra and using the knowledge of (and some assumptions based on) the observation geometry, one can determine the total radiance and some elements of the polarization state. We will present different options for filter combinations and discuss their calibration accuracy and performance. We present some design options for a spectrometer going to Venus, with the trade offs that need to be considered. As a bonus, the polarization state is a result of properties of the scattering medium. So, for instance, it can be used to constrain the aerosol size and composition.
How to cite: Erwin, J., Vanhellemont, F., Willame, Y., and Robert, S.: On using polarization filters to build a high performance polarimeter/spectrometer, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1020, https://doi.org/10.5194/epsc2024-1020, 2024.
Over recent decades, laser altimeters have been an essential tool in planetary exploration, enabling precise topographic characterisation of planetary bodies within the Solar System [1]. The working principle of this type of topographic measurement relies on a time-of-flight estimation of laser pulses emitted by the instrument and reflected from the surface of the target. A photon sensor then detects the returning signal, permitting the evaluation of the range between the satellite and the geological features, as well as the variations of intensity and spread of the beam shape. These strategies allow for the reconstruction of altitude, surface roughness, terrain slope, and albedo, thus enabling the creation of accurately calibrated digital maps of planetary landscapes [2].
The European Space Agency's BepiColombo mission to Mercury, as well as the JUICE mission to the Jovian system, carry the laser altimeters BELA (BepiColombo Laser Altimeter) and GALA (Ganymede Laser Altimeter). These instruments, developed by the DLR Institute for Planetary Research in collaboration with national and international partners, use the above-mentioned measurement approach but implement slightly different technical specifics. BELA will study the surface of Mercury from an orbit between 400 to 1000 km, using a 50 mJ Nd:YAG laser with a repetition rate of 10 Hz to cover a 6 to 40 m spot on the target [3]. Conversely, GALA will use 17 mJ pulses with a repetition rate of 30 Hz to determine topography on Ganymede from 500 km of altitude [4].
BELA and GALA have been implemented on large satellites and require significant volume, mass, and power resources. However, there is an increasing trend to employ small satellites and CubeSats not only in near-Earth orbit but also on interplanetary exploration missions [5]. Instruments must be miniaturised to enable laser altimetry for topographic purposes on such missions and open up new possibilities for innovative scientific investigations.
The goal of the current project is to pave the path for adapting the technology developed with BELA and GALA to the new scales being explored by small satellites and CubeSats. Indeed, the mass of the instruments (15 kg for BELA, 25 kg for GALA), their power consumption of about 50 W, and their receiver apertures of about 25 cm diameter [3,4] are not conducive to use on small satellite platforms. Here, we will report on the development of an elegant breadboard for a 3 CubeSat-Units laser altimeter implementing a transceiver design with an 8 cm aperture using Commercial Off-The-Shelf components (COTS) and a SPAD (Single Photon Avalanche Diode) array detector.
In our quest for the most suitable design, we conducted a trade-off study considering 16 possible optics arrangements. The focus was on a Lunar orbiter mission case, aiming to characterise future landing sites and assist in in-situ operations. The driving requirements for the selection were the compactness of the optical system, the laser footprint dimensions, the susceptibility to straylight, the coalignment budget, the transmittance, and the thermal stability. After a preliminary down selection and rigorous analyses of the last candidates in the optical design software Zemax, a final design was identified based on its performance in the above-mentioned requirements. The straight transmitter design combined with a double-deflective receiver performed best regarding internal stray light and coalignment budget, as shown in Fig. 1. This design can be accommodated in a 10x10x20 cm3 volume, equivalent to a 2U CubeSat design, leaving space for the implementation of the other subsystems of the instrument and demonstrating its practical application.
A laboratory setup implementing the design is currently being assembled (Fig. 2), and we will present a preliminary characterisation of the optics performance in terms of the quality of the laser expansion and the coalignment between the laser source and detector boresight axes. These studies will address the technology's readiness level and future development (adjustments) needed by the instrument, currently under Phase 0 study in collaboration with the European Space Agency.
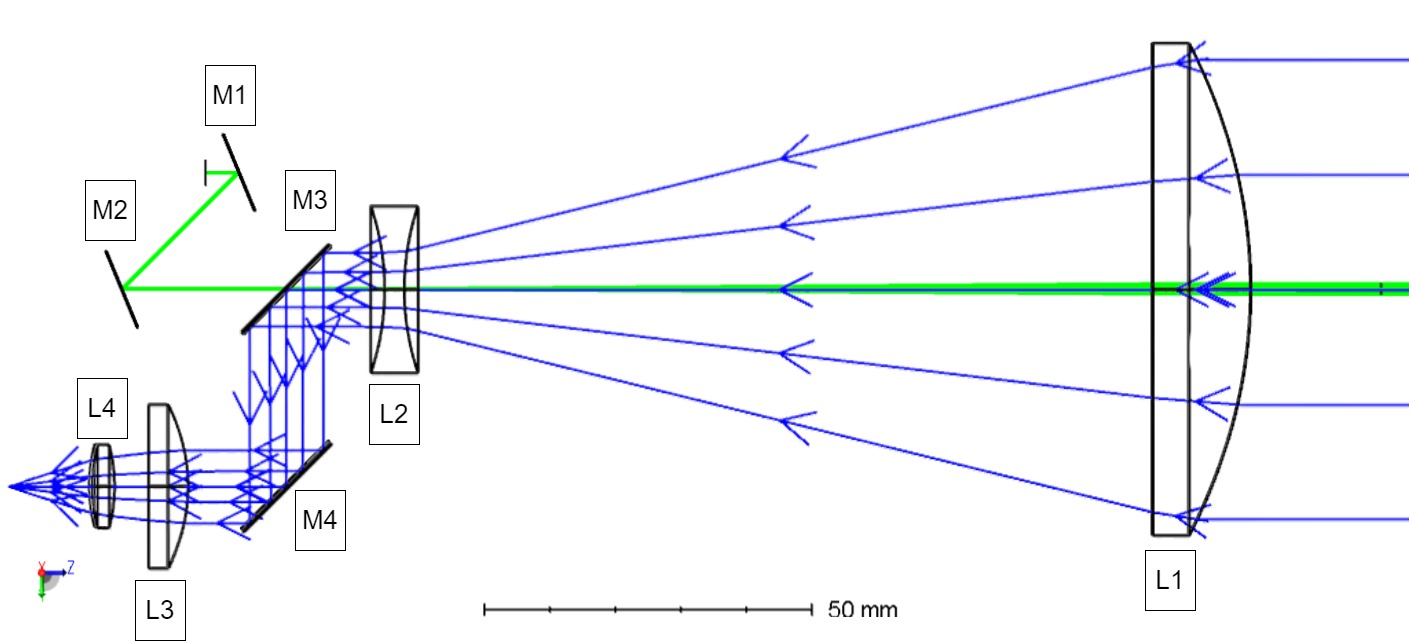
Fig. 1: Zemax model of the final transceiver design. In green, the laser beam expanded by the transmitter optics; in blue, the received signal focused on the detector plane. The ‘L’ labels refer to the lenses, while the ‘M’ labels refer to the mirrors.

Fig 2: Detail from the transceiver design's CAD model showing the different components' arrangement. The ‘L’ labels refer to the lenses, while the ‘M’ labels refer to the mirrors. In green, the laser beam expanded by the transmitter optics; in blue, the received signal focused on the detector plane.
[1] Zhou et al., Infrared Physics & Technology 86, 147-158, 2017. [2] Kallenbach et al., Journal of Geodesy, 95:4, 2021. [3] Thomas et al., Space Science Reviews, 217, 25, 2021. [4] Hussmann et al, CEAS Space Journal 11, 381-390, 2019. [5] Michel et al., Planetary Science Journal, 3:160, 2022.
How to cite: Affatato, V., Althaus, C., Binger, J., Grott, M., Hussmann, H., Hüttig, C., Lingenauber, K., Potin, S., Saathof, R., and Stark, A.: Optical Design of a Miniaturized Laser Altimeter Implementing Single-Photon Counting Detection for Topographic Mapping using Small Satellites, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-474, https://doi.org/10.5194/epsc2024-474, 2024.
The Compact Lunar Neutron and Gamma-ray Spectrometer (CLUNGAS) is targeting planetary science and in-situ resource utilisation (ISRU) such as mapping sub-surface water on celestial bodies. CLUNGAS is the primary payload in the small lunar mission proposal for Selene’s Explorer for Roughness, Regolith, Resources, Neutrons and Elements (SER3NE).
SER3NE is a small satellite mission performing gamma-ray and neutron spectroscopy, hyperspectral near-infrared spectroscopy, and laser altimetry, roughness, and albedo observations at unprecedented spectral and ground resolution. The aim is to: characterise the lunar surface to unravel its volatile origin and delivery processes, uncover the geological processes that shaped the Moon to prospect lunar resources for ISRU at future landing sites, estimate the neutron lifetime and the orbital evolution of the Earth-Moon system.
In this paper, we present the preliminary design of CLUNGAS tailored for the SER3NE mission, as well as environmental analysis to determine design parameters for the detector.
CLUNGAS is a compact solid-state detector capable of gamma-ray imaging in the range of 30 keV - 8 MeV with an energy resolution of < 4% FWHM at 662 keV as well as the detection of thermal to epithermal neutrons The primary detecting material is a CLLBC (Cs2LiLa(Br,Cl)6:Ce) dual-mode scintillator capable of both high-resolution gamma-ray spectroscopy and thermal to epi-thermal neutron detection. The preliminary detector layout aims for a 4x4 chessboard design where CLLBC is accompanied by lanthanum bromide (LaBr3), as depicted in figure 3, for improved gamma-ray – neutron distinction.
The detector core scintillators are surrounded by plastic scintillators serving as an anti-coincidence shield against highly charged particles. Mitigation techniques for secondary neutrons generated by impact of Galactic Cosmic Rays (GCR) and Solar Energetic Particles (SEP) on the spacecraft will be evaluated as well.
The detector readout is based on the ROSSPAD module provided by IDEAS, hosting the low power space-grade detector read-out integrated circuit (ROIC) SIPHRA coupled to a number of Si photomultipliers (SiPM). SIPHRA is radiation tested and has flight heritage.
The power consumption will be below 4W per module and the instrument weight below per unit, with the scintillator volume and shielding requirements as the main design driver. The proposed instrument consists of two units, one covered with few mm thick Gd shield, enabling the distinct detection of both thermal and epithermal neutrons. It will fit into 2U, with the electronics being compatible with the PC104 format. We plan to keep the form factor also for other missions and demonstrations on other platforms.
Using existing data, such as Apollo and LP, we can estimate the expected lunar radiation environment. This is vital to tune the detector design and estimate the background noise such as secondaries generated by the spacecraft itself. The use of Geant4 allows us to track the creation of secondaries (e.g., protons, electrons/positrons, Kaons, muons, pions, and gamma-rays) and their transport in the shallow planetary sub-surfaces. Figure 1 shows the expected neutron flux generated in different lunar soil types due to Galactic cosmic ray impact. The ratio between thermal and epi-thermal neutrons count rates allows for the identification of different sub-surface elements, such as hydrogen content and thus the potential amount of water in the soil. The gamma-ray leakage flux for different lunar soils is presented in figure 2. With the gamma-ray spectrum the composition of the soil can be characterised.
Further, we simulated the response of the preliminary detector design. Figure 3 shows the simulated design in Geant4, with the green light symbolising scintillation photons. Figure 4 visualises the gamma-ray response for 662 keV (Cs-137) stimulation. In the summed energy spectrum over all scintillators, the 662 keV peak, as well as Compton radiation, clearly is visible. Figure 5 demonstrates the detection of neutrons in CLLBC scintillators by the peak of gamma-equivalent energy at 3.2 MeV, as well as effect of the thermal neutron shield (here Cd). Detected neutrons in the shielded CLLBC scintillators are reduced by almost 50%, which is equivalent to the expected number of thermal neutrons in the non-shielded peak.
First measurements with an engineering model, based on the terrestrial version of the ROSSPAD module provided promising results. We tested the read-out electronics and CLLBC scintillator with various gamma sources, such as Cs-137 and Co-60, as well as neutron source AmBe and were able to demonstrate the spectroscopy capabilities within the targeted specifications, as well as the detection of thermal and epithermal neutrons.
In conclusion, we are developing a hybrid gamma-ray and neutron detector for lunar ISRU onboard the SER3NE mission. Detector simulations and laboratory demonstrations show the capability of neutron and gamma-ray spectroscopy. Environmental simulations support the detector design and prepare for future science data analysis.
Next steps are fine tuning and verification of the detector simulation model, extended measurement campaigns of an engineering model, as well as adaption of the electronics design to accommodate spacecraft interfaces.
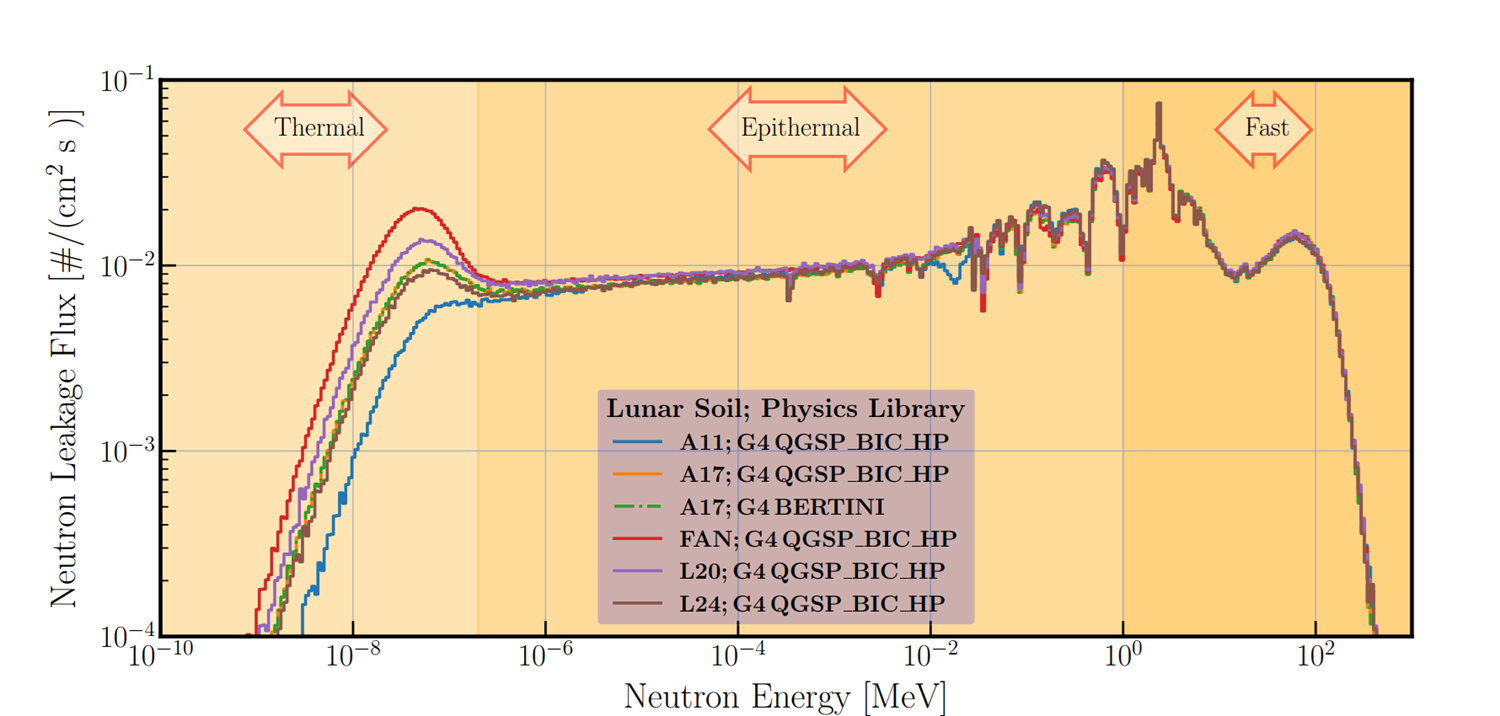
Figure 1 : Neutron flux spectra for the following lunar compositions: A11, A17, FAN, L20 and L24. We have used the following Geant4 Physics libraries: 1) QGSP, and 2) BERT. The full neutron energy range from thermal to fast neutron is shown.
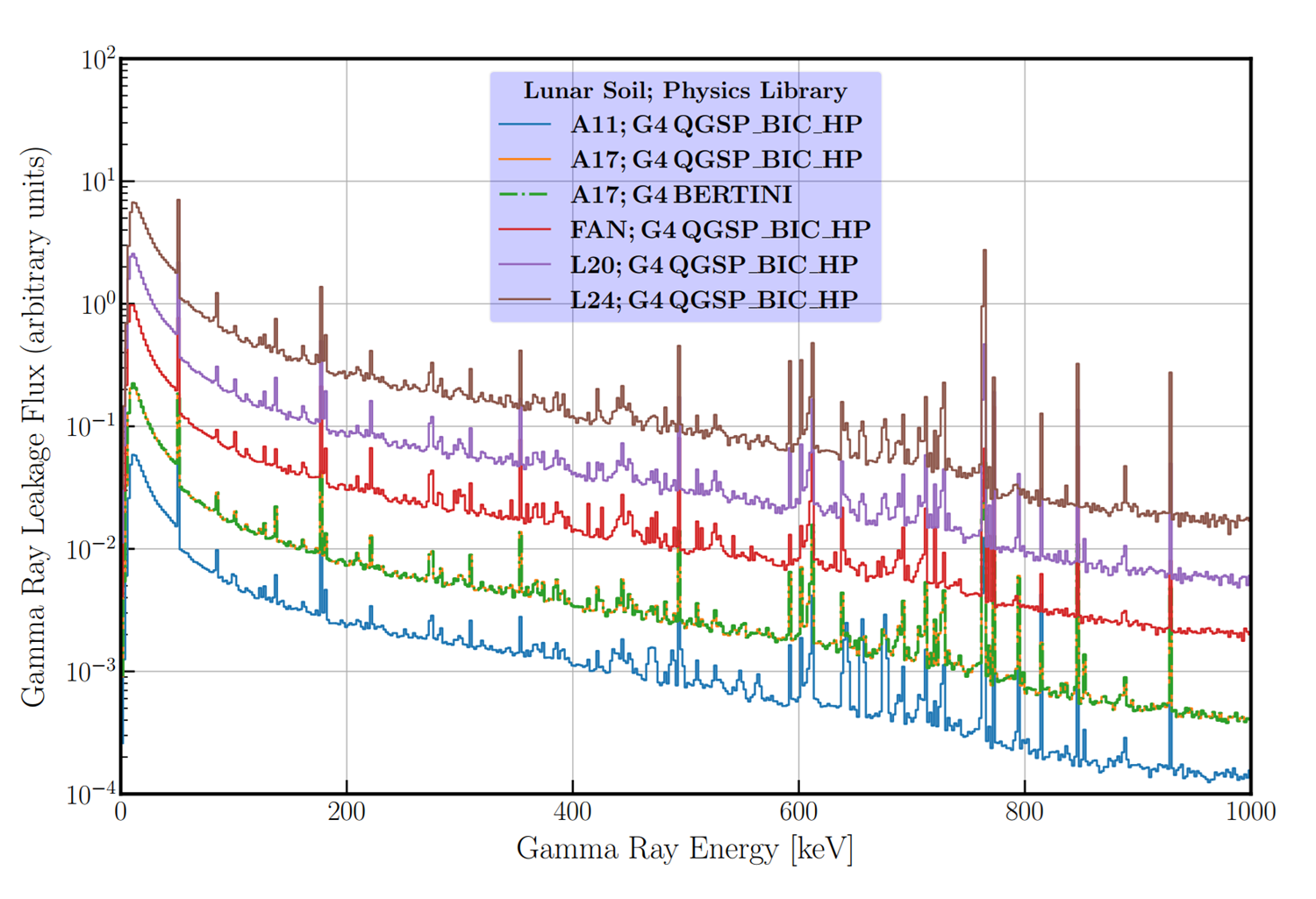
Figure 2: Gamma-rays flux spectra for the following lunar compositions: A11, A17, FAN, L20 and L24. We also have used the following Geant 4 Physics libraries: 1) QGSP, and 2) BERT. The different spectra present arbitrary normalisation.
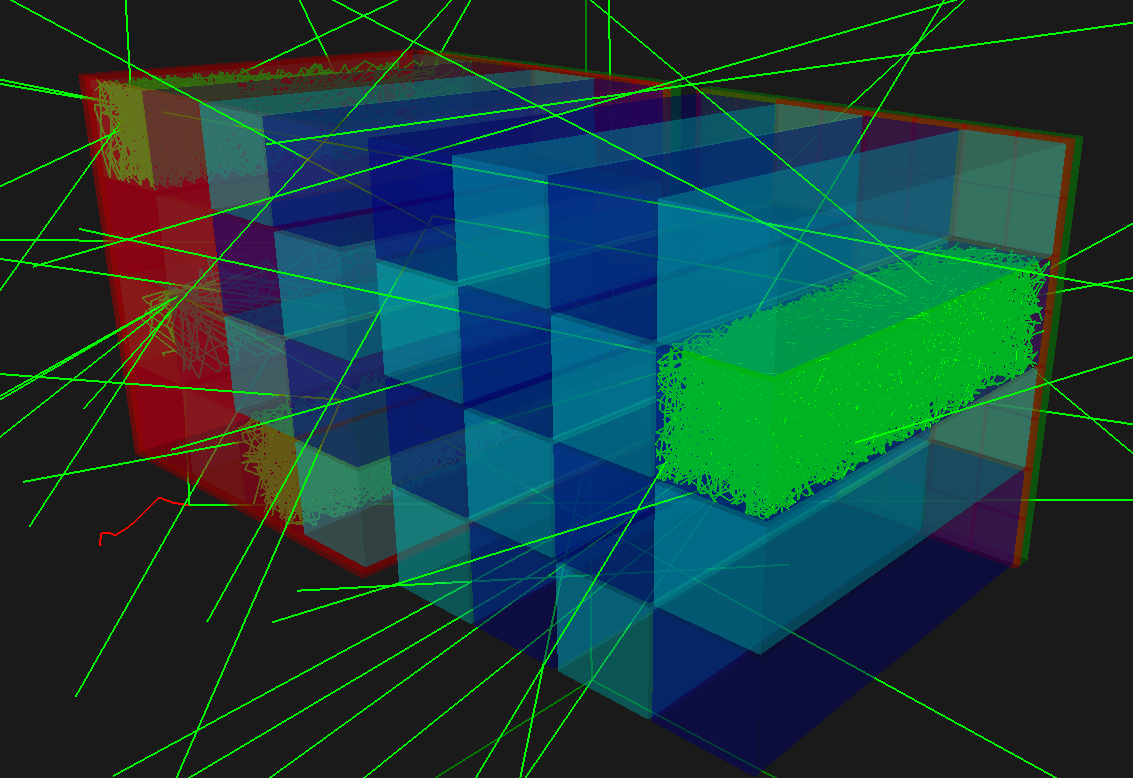
Figure 3 Simulated detector design in Geant4. 2 units with a 4x4 chessboard with CLLBC and LaBr scintillators, one unit covered in 0.5mm Cd foil. Inter-scintillator shielding with 0.5mm Al.
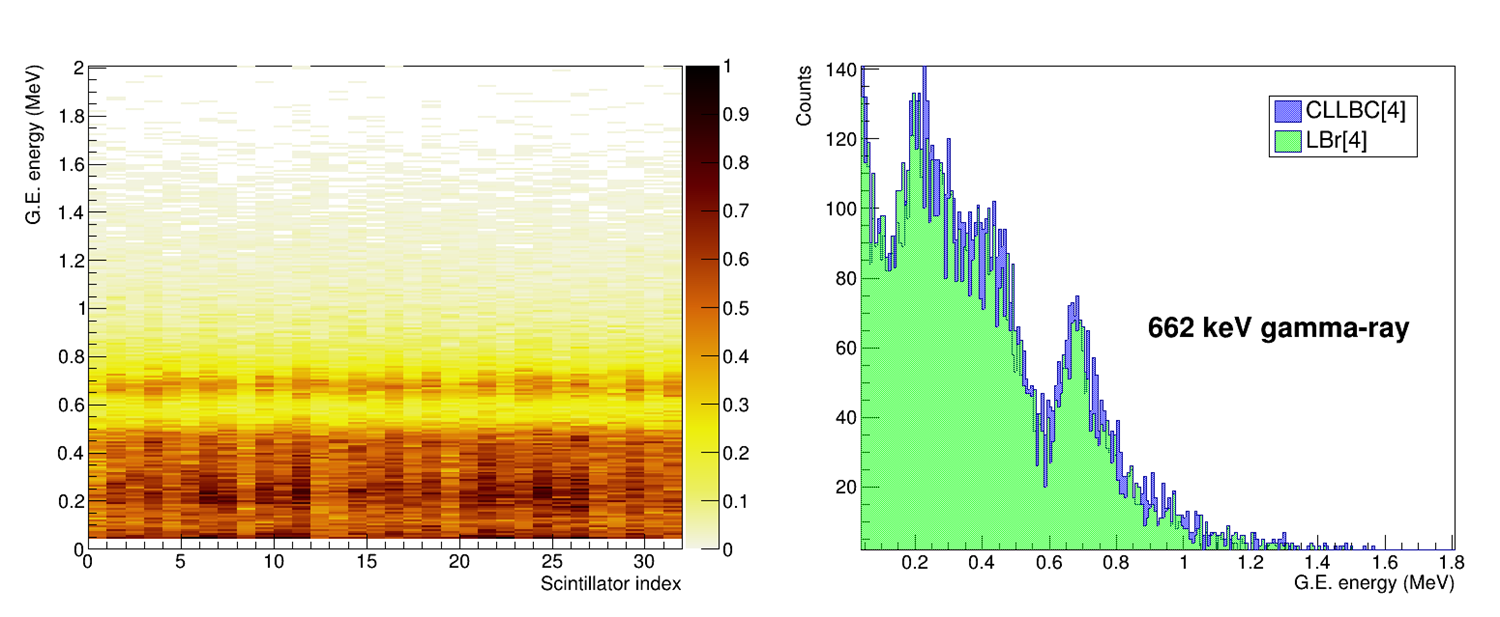
Figure 4: Gamma-ray detection capability with simulated detector design in Geant4. Left: Gamma equivalent energy spectrum for each scintillator for gamma source. Right: summed energy spectra over all scintillators, Compton radiation and expected peak at 662keV.

Figure 5: Neutron detection capability with simulated detector design in Geant4. Left: summed energy spectra for both scintillators. Right: comparison between the Cd covered and the uncovered unit.
How to cite: Kohfeldt, A., Al Jebali, R., and Alves Teodoro, L. F.: A Compact Lunar Neutron and Gamma-Ray Spectrometer on Board SER3NE mission, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-580, https://doi.org/10.5194/epsc2024-580, 2024.
Enceladus, a moon of Saturn, presents one of the most promising environments in the Solar System to discover habitable conditions beyond Earth. Following the observation of cryovolcanic activity by the Cassini mission, Enceladus has become a focal point for planetary exploration. Both NASA and ESA have identified Enceladus as a primary target for future exploration endeavors. A significant proportion of scientific questions regarding Enceladus can be addressed through the measurement of its geodetic parameters (e.g., rotation state, tidal deformation) and surface characterization in terms of topography and reflectance. A laser altimeter is an ideal instrument for accomplishing this task.
Laser altimeters have been widely employed on space missions, particularly for targets that have not been explored by orbiting spacecraft (e.g., Ganymede, Mercury, and numerous asteroids). Furthermore, when it comes to detecting relatively small tidal deformations, a laser altimeter is capable of providing the required level of accuracy. However, the capabilities of a laser altimeter extend beyond this application. Specifically, for Enceladus, a laser altimeter can address the following scientific objectives:
- Measure the global shape/topography.
- Characterize potential landing sites in terms of landing safety.
- Measure the surface roughness at baselines as small as a few meters.
- Measure the libration amplitude.
- Determine the tidal Love number h2 by measuring the vertical tidal deformation.
- Constrain the thickness and the rheological properties of the ice shell.
- Quantify the tidal heat dissipation by measuring the tidal phase lag.
- Determine the extent of the sub-surface ocean and the size of the silicate core.
- Determine the ice particle size on the surface by measuring the surface albedo.
For the purpose of particle size measurement, we exploit a water ice absorption band situated at 1040 nm, which is in close proximity to the laser wavelength of 1064 nm, where albedo measurements are conducted. The depth of this absorption band exhibits a correlation with the diameter of ice particles, although the decrease in reflectance (for larger particle diameters) is moderate, resulting in a surface albedo exceeding 80% within the absorption band (Stephan et al., 2021). The accomplishment of the aforementioned objectives would enable addressing key scientific questions pertaining to the formation and evolution of Enceladus, as well as the elucidation of the mechanism driving its cryogenic activity.
Instrument concepts with multiple laser beams and detector arrays, both with classical avalanche diodes as well as single-photon counting diodes, are under consideration and will be traded-off against the science objectives and the required resources. One potential design approach for a laser altimeter tailored to Enceladus can be obtained by utilizing the concept of the Ganymede Laser Altimeter (GALA, Hussmann et al., 2019), currently en route to Jupiter. By adapting the design of GALA to Enceladus it is anticipated that the power, mass, and volume of the instrument can be significantly reduced due to the twofold increase in surface albedo compared to Ganymede. Furthermore, improvements in volume and mass budgets are expected to be achieved through the implementation of a combined optical design for the transmitter and receiver.
In our study, we use recently discovered orbits around Enceladus, which provide comprehensive global coverage and minimal distances to the surface (Parihar et al., 2024). The average altitude for these orbits is approximately 100 km, with a mean ground velocity of 100 m/s. Employing the same pulse divergence of 100 µrad (full cone) as utilized in GALA, we would obtain footprints of 10-meter diameter on the surface. The relatively slow ground velocity permits moderate sampling frequencies on the order of 20 Hz, thereby enabling overlapping footprints along the track (with a 5 m distance between footprint centers). Given the high surface albedo, the aperture of the receiver telescope and the pulse energy of the emitted pulse can be significantly decreased. Considering an aperture of 8 cm, the pulse energy can be reduced by approximately a factor of 10 compared to GALA, while maintaining equivalent detection performance. This would allow for the utilization of a low optical-power laser with an output power of only a few tens of mW, thereby significantly reducing the costs associated with the instrument.
References:
Hussmann et al. 2019, "The Ganymede laser altimeter (GALA): key objectives, instrument design, and performance." CEAS Space Journal 11(4): 381-390. https://doi.org/10.1007/s12567-019-00282-8
Parihar et al 2024, “Numerical analysis of polar orbits for future Enceladus missions”, EGU General Assembly 2024, Vienna, Austria, 14–19 Apr 2024, EGU24-17668, https://doi.org/10.5194/egusphere-egu24-17668, 2024.
Stephan et al. 2021, “VIS-NIR/SWIR Spectral Properties of H2O Ice Depending on Particle Size and Surface Temperature”. Minerals, 11, 1328. https://doi.org/10.3390/min11121328
How to cite: Stark, A., Lingenauber, K., Althaus, C., Binger, J., Hüttig, C., Affatato, V., Stephan, K., Grott, M., and Hussmann, H.: Laser altimeter for Enceladus: Scientific objectives and design approaches, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-931, https://doi.org/10.5194/epsc2024-931, 2024.
Karman+ is a U.S, Colorado-based startup that seeks to mine space resources from near-Earth asteroids to provide abundant, sustainable energy and resources in space and for Earth. Asteroids can contribute substantially to resource availability while also reducing harmful externalities, although uncertainties remain related to asteroid material characteristics and the cost effectiveness of deep space mining. We stand convicted that these uncertainties are not obstacles to asteroid mining but do require bold efforts to address. Our first mission, High Frontier, addresses these challenges head on. The mission is already fully funded and targets a late 2026 launch with the following objectives:
- Rendezvous with a near-Earth asteroid;
- Capture regolith from the surface at kilogram scale;
- Maintain a total mission cost (s/c, operations, launch, R&D, etc) in the range of $20-30 million; and
- Provide scientific data on the asteroid, including surface imaging and select physical measurements.
This is a technical demonstration mission and its objectives focus on commercial viability. Namely, with High Frontier we seek to address the cost-effectiveness of deep space mining missions as well as the scalability of regolith excavation. We use the term excavation with particular emphasis given the distinction of kilogram-scale capture in contrast with small-scale scientific sampling.
Our effort builds on collaboration with the scientific community as well as lessons learned and data captured from previous space missions, including: asteroid interaction missions such as OSIRIS-REx (NASA), Hayabusa 1 and 2 (JAXA), DART (NASA), Lucy (NASA), small-sat deep space missions like CAPSTONE (NASA), survey missions such as Gaia and Euclid (ESA), and the growing number of public and private lunar missions.
For our asteroid mining operations to reach eventual profitability, our target asteroids must be easily reachable both in terms of delta-V and time of flight so as to minimize propellant mass and spacecraft mass, size, and complexity. While there are a large number of known NEAs, the number of them that meets our ideal criteria is small. Most of these are also very small, with diameters estimated in tens of meters – a size class that has never been visited before. Can we expect regolith on the surface of such asteroids, and if so, how much of it? If the asteroid is a solid monolith, what is its tensile strength and density? Clearly, these are important questions when considering landing operations and, even more so, for designing our sample extraction mechanism. Additionally, the small size of most of these asteroids makes them very difficult to observe, which leads to a lack of available data; in particular there are few NEAs on our list which have spectra, let alone which are confirmed to be carbonaceous by their spectra. Some of these are even classified to different taxonomies by different studies, which compounds the uncertainty. Nonetheless, a number of interesting and potentially suitable asteroids do exist, some of which we will briefly discuss.
In this talk, we will detail our overall concept for High Frontier, our target selection approach and potential target asteroids in addition to the scientific challenges we currently face, including avenues for possible research, with the aim of communicating our intent for broader awareness among both industry and the scientific community for potential collaboration, partnerships, and avenues for instrumentation and other spacecraft technology both for High Frontier and beyond.
How to cite: Siltala, L., Anderson, K., Boyce, F., Crull, D., van den Dries, T., Hallam, S., Howell, D., Velez, D., and Whittle, L.: High Frontier: a Fully-Funded Private Excavation Mission to a Near-Earth Asteroid, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-587, https://doi.org/10.5194/epsc2024-587, 2024.
Physical interaction with small solar system bodies (SSSB) for sampling has become the prime enabler for front-line planetary science related to SSSBs, propagating into solar system science towards interstellar objects, exoplanet and stellar formation research. [1,2,3] However, not every SSSB mission can take risks of extremely close approach, and heritage spacecraft to be re-used may not be designed with sampling in mind. Thus, risk takers that build a bridge to the surface at low resources cost may be of interest for near-term and future missions.
Physical contact is also key for planetary defense (PD) and in-situ resource utilization (ISRU). From the seminal 1980 Alvarez paper on impact-triggered global extinction events to the 0.5 MtTNT Chelyabinsk airburst of 2013, the political mandate to discover, track and understand the population of potentially hazardous objects (PHO) was created and implemented, first in the U.S., now increasingly also in Europe. Within another decade, DART, the first PD test mission was built and successfully flown by NASA to perform a kinetic impact on Dimorphos. [4] ESA is following up with Hera, an impact effects assessment mission to the (65803) Didymos system to be launched later this year. [5]
Following a brief rush of interest in SSSB mining specifically for platinum-group metals and water, we now see the beginning of sustained long-term interest in SSSB resources as a potential major source of bulk materials for heavy or distant space-based infrastructures. [6]
The prerequisite for any such undertakings is scientific understanding of all relevant SSSB properties, including composition, surface and interior structure, and thermal properties. Although patterns appear, a comprehensive and detailed SSSB classification still has to evolve, with each investigated asteroid displaying its own uniqueness. In particular, geotechnical and interior structure aspects are little understood. This requires a much broader and more in-depth characterization effort for and by the ‘asteroid user communities’ – planetary science, planetary defense, planetary resources, and planetary infrastructures.
The close Earth encounter of (99942) Apophis on Friday, April 13th, 2029 offers many scientific exploration, interaction and responsive mission implementation exercise opportunities that will also deeply inform PD and ISRU development. A small flotilla of planetary science missions led by OSIRIS-APEX and RAMSES is set to rendezvous with Apophis around the close encounter. It can include sample-return because of a fast, low ∆v return trajectory opportunity which we propose to take advantage of by the APOphiS SUrface sampler, APOSSUM, a small carry-on sample-return spacecraft (Hilchenbach et al., this conference) with a compelling science case including investigations into the recent LL chondrite parent body disruption (Stenzel et al., this conference).
An ideal complement for the orbiters OSIRIS-APEX and RAMSES as well as APOSSUM would be the deployment of MASCOT@Apophis nano-landers, derivatives of the shoebox-sized Mobile Asteroid Surface scCOuT deployed by the JAXA Hayabusa2 mission to carbonaceous NEA (162173) Ryugu. [7-12] MASCOTs are compatible also with small interplanetary missions designed for carry-along- or piggy-back launch accommodation, such as APOSSUM. After the initial scouting phase, the unique mobility mechanism and the addition of photovoltaic power enable long-lived missions that can traverse a SSSB’s surface by hopping from location to location. Many mission-specific MASCOT derivatives have been explored, such as the MASCOT2 for ESA‘s AIM spacecraft, the precursor of Hera which is the basis for RAMSES, or the CALICUT for the CNSA ZhengHe mission concept. [13-15] A self-transferring, minimalistic nanolander for a complex binary asteroid system has also been studied in detail. [16,17]
Many near-Earth asteroids (NEA) have occasional close Earth encounters at a few lunar distances which enable the implementation of a short duration sample-return trajectory similar to those of APOSSUM. These could be provided rapidly, by ‘asteroid as a service’ spacecraft evolved from APOSSUM, augmented with a transfer stage for propulsion, and with MASCOTs to scout the surface ahead of the sampling operations and to provide high-resolution surface and interior context science.
Further along, target-flexible Multiple NEA Rendezvous (MNR) missions can significantly expand the choice of SSSB targets accessible within a reasonable time. The DLR-ESTEC Gossamer Roadmap Science Working Groups have identified MNR as a mission class uniquely feasible with solar sail propulsion. [18-20] Integration of a shuttling sample-return lander similar in size to APOSSUM has been studied in detail jointly by DLR and JAXA for the Solar Power Sail long-duration mission design, OKEANOS. [21-24]
The performance of now-term technology, i.e., that which can be designed into flight hardware immediately, is sufficient to fly all these missions. The methods which led MASCOT within 2 years from funding acquisition to flight model on the spacecraft, such as Concurrent Engineering, Constraints-Driven Engineering and Concurrent Assembly Integration and Verification enable the agile implementation of responsive missions based on and designed for re-use. [25,26]
Mother Nature offered a rare opportunity 20 years ago with the discovery of Apophis on June 19th, 2004, and its upcoming close encounter in 2029. It’s time to get up and go. [27]
[1] Tsuda et al., 2013, doi:10.1016/j.actaastro.2013.06.028, [2] Lauretta et al., 2017 doi:10.1007/s11214-017-0405-1, [3] Küppers et al, 2024, hou.usra.edu/meetings/apophis2024/pdf/2053.pdf, [4] Cheng et al. 2023, doi:10.1038/s41586-023-05878-z, [5] Michel et al., doi:10.3847/PSJ/ac6f52, [6] www.planetarysunshade.org/s/PSF-State-of-Space-Intl-Print-Version.pdf, [7] Ho et al, 2016, DOI:10.1007/s11214-016-0251-6, [8] Bibring et al., 2017, DOI:10.1007/s11214-017-0335-y, [9] Jaumann et al., 2016, DOI:10.1007/s11214-016-0263-2, [10] Grott et al., 2016, DOI:10.1007/s11214-016-0272-1, [11] Herčík et al., 2016, DOI:10.1007/s11214-016-0236-5, [12] Ho et al., 2021, doi:10.1016/j.pss.2021.105200, [13] Lange et al., 2018, doi:10.1016/j.actaastro.2018.05.013, [14] Hérique et al., 2019, doi:10.1016/j.actaastro.2018.03.058, [15] Ho et al., 2023, doi:10.1016/j.actaastro.2023.08.024, [16] Chand, 2020, elib.dlr.de/143958/, [17] Chand et al., IAC 2020, [18] Dachwald et al., 2014, doi:10.1007/978-3-642-34907-2_15, [19] McInnes et al., 2014, doi:10.1007/978-3-642-34907-2_16, [20] Macdonald et al., 2014, doi:10.1007/978-3-642-34907-2_17, [21] Mori et al., 2018, doi:10.2322/tastj.16.328, [22] Okada et al., 2018, doi:10.1016/j.pss.2018.06.020, [23] Grundmann et al., 2017, elib.dlr.de/118803/, [24] Grundmann et al., 2019, doi:10.1016/j.actaastro.2018.03.019, [25] Grimm et al., 2018, doi:10.1016/j.paerosci.2018.11.001, [26] Grimm & Hendrikse, 2019, doi:10.1016/j.mex.2019.08.010, [27] Caffey & Wiedlin, 1982.
How to cite: Grundmann, J. T., Hilchenbach, M., Dachwald, B., Chand, S., Gundlach, B., Hamm, M., Ho, T.-M., Lange, C., Plettemeier, D., Quantius, D., Schmitz, N., and Seibert, F. M. and the APOSSUM Team: Establishing Strategic Asteroid Resource Exploration Using a Combination of Small Spacecraft Solutions and Solar Sailing, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1136, https://doi.org/10.5194/epsc2024-1136, 2024.
The Asteroid Impact and Deflection Assessment (AIDA) collaboration, consisting of NASA’s DART mission and ESA’s Hera mission, aims to test the capability of a kinetic impactor to deflect an asteroid. At the end of September 2022, DART successfully impacted the secondary of the binary asteroid system
Didymos, called Dimorphos. The resulting changes to the system are significant [1] and follow up observations by the Hera mission are of great importance. Hera will rendezvous with the binary system in early 2027 and part of its payload suite are two CubeSats which will orbit in close proximity of the asteroids. The two CubeSats, named Milani and Juventas, will be the first nanosatellites to orbit in the close proximity of a small celestial body and to perform scientific and technological operations around a binary asteroid. Milani’s main scientific objectives are to characterize the surface and dynamical environment of both bodies, investigate the dust environment around the system, and provide measurements for determining the gravity field. Besides the scientific objectives, the Milani mission also aims to achieve several technological objectives related to testing the effect of the environment on CubeSats grade hardware and validating novel autonomous navigation algorithms. One of the payloads of Milani is the NavCam, an optical imager with and RGB sensors which nominally provides information on the translational and rotational state of Milani but will also be used to perform scientific investigations and perform experiments related to autonomous navigation around asteroids.
The use of CubeSats allows for more riskier operations, including closer flybys of the system. This allows for high resolution imaging to be performed, which can be of great aid to the observations performed by Hera. Both the scientific and technological outputs of Milani will aid the main objectives of the Hera mission, and additionally help inform both the scientific payload selection and navigation system design for future CubeSat missions to asteroids. This work describes both the scientific investigations the NavCam will perform, and the setup of the autonomous navigation experiment.
Science Objectives
The main scientific objectives of the Milani NavCam are: to support the surface mapping and crater modelling in different color bands, obtain shape models of Didymos and Dimorphos, and support the gravity science investigation. For the surface mapping, a global mapping of the surfaces will be performed, with a higher resolution focus on the crater (if present) made by DART. The RGB filter of the NavCam, with bands centred on 470 nm (B), 550 nm (G), and 600 nm (R), allows for spectral information to also be included in these investigations. The NavCam will also provide its own shape models of both bodies, including their rotational state. These models can be combined with the shape models generated by the other spacecraft to improve the general global parameter estimation. Finally, the gravity science experiment can be aided by the NavCam observations in several ways. First, the tracking of optical observables like surface features will improve the accuracy of the state estimation of Milani and thus also improve the accuracy of the gravitational field. Second, the optical tracking of the landing maneuver of Juventas will also improve the accuracy due to the aid of another tracking instrument (besides the ISL). Finally, just as was done for OSIRIS-Rex [2], the tracking of natural particles around the system (if present) would allow for a significant improvement in the gravity field modelling.
Autonomous Navigation Experiment
Besides the scientific objectives, the NavCam will also be used for an opportunistic technology demonstration objective regarding the use of autonomous navigation algorithms on-board a CubeSat. Regarding the navigation experiment, the NavCam will provide several observables, e.g. the phase angle and centre of figure of both bodies, which are then used by a navigation filter to provide state estimates of Milani. These results are then compared with ground based orbit determination to estimate the achieved accuracy of the autonomously estimated state.
References
[1] Cheng AF, Agrusa HF, Barbee BW, et al (2023) Momentum transfer from the DART mission kinetic impact on asteroid Dimorphos. Nature 616:457–460. https://doi.org/10.1038/s41586-023-05878-z
[2] Chesley SR, French AS, Davis AB, et al (2020) Trajectory Estimation for Particles Observed in the Vicinity of (101955) Bennu. J Geophys Res Planets 125:e2019JE006363. https://doi.org/10.1029/2019JE006363
How to cite: Fodde, I., Cremasco, A., Piccolo, F., Califano, P., Civati, L., Rizza, A., Giordano, C., Ferrari, F., and Topputo, F.: Scientific Observations of the Didymos Binary Asteroid System using the Milani NavCam, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1076, https://doi.org/10.5194/epsc2024-1076, 2024.
Deimos and Phobos are considered key targets for understanding the origin and evolution of Mars and the outer Solar System planets. To date, there is no clear consensus in the scientific community about the formation of the two moons [1]. There are two main hypotheses for the origin of the moons: they are thought to have been formed by a giant impact between Mars and a protoplanet, or they are captured asteroids. [2].
TASTE - Terrain Analyzer and Sample Tester Explorer is a 16U small satellite mission consisting of a 12U orbiter capable of deploying a 4U lander to explore the Martian moon Deimos. The high-level scientific objectives of the mission are to understand the origin of Deimos by combining both global morphology and elemental composition from close orbit and local surface organic and mineralogical composition with a lander, complementing the expected results of the JAXA MMX mission [3]. The orbiter will carry a camera and an X- and γ-ray spectrometer, while the lander will carry a camera and the Surface Sample Analyser (SSA). In addition, the orbiter's radio will be used to collect gravity field data.
The in-situ SSA payload consists of the Sample Acquisition Mechanism, which collects the samples from the surface, the Sample Extraction Chamber, where the organic sample is extracted, and the Sample Analytical Laboratory, where the organic samples are measured in a Lab-on-Chip device by fluorescence. The orbiter will carry a miniaturised X-γ-ray spectrometer to characterise the elemental composition of the surface. The relative abundance of elements with atomic number ≤20 down to a few micrometres of the surface will be measured by fluorescent X-ray spectroscopy, using solar X-rays to excite the atoms of the elements. Gamma-ray spectroscopy of nuclear lines excited by galactic cosmic rays will also be used to assess the abundance of elements in the surface down to 10-20 cm.
TASTE is funded by the Italian Space Agency under the ALCOR programme. The consortium, consisting of the INAF Arcetri and Trieste Observatories and the Politecnico di Milano, has successfully completed Phase A and is about to start Phase B. TASTE represents an innovation in the CubeSat landscape, combining the development of space technology with cutting-edge scientific analysis. In this presentation, the scientific objectives and mission design to develop the TASTE CubeSat class mission for scientific investigations in deep space low-gravity environments will be presented.
Acknowledgements: TASTE is supported by the Italian Space Agency (ASI) within the ALCOR Programme (Contract TASTE n. 2022-26-I.0). The project is lead by the Italian consortium INAF-Arcetri Astrophysics Observatory, Firenze, Astronomical Observatory of Trieste and the Politecnico of Milano-DAER, Milano, Italy.
References:
[1] Rosenblatt et al., (2016), Nat. Geosci, 9, pp.581–583.
[2] Murchie et al., (1999), JGR, 104 (E4), pp.9069-907.
[3] Campagnola et al., (2018), Acta Astronautica, 146, pp. 409-417.
How to cite: Brucato, J. R., Lavagna, M., Fiore, F., Meneghin, A., Zanotti, G., Prinetto, J., Bechini, M., Belloni, E., de Cecio, F., Dottori, A., della Corte, V., Baroni, G., Citossi, M., Dogo, F., Trevisan, S., Fedele, A., Amoroso, M., and Natalucci, S.: TASTE: Science and Technology of a CubeSat Mission to the Martian Moon Deimos. , Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-589, https://doi.org/10.5194/epsc2024-589, 2024.
Comet Interceptor is an ESA Fast-class space mission, which will be launched in 2029 towards an as-yet-undiscovered dynamically new comet, i.e., never having approached the Sun before. Such objects are difficult to target, they can only be discovered when entering the inner Solar System and becoming active. This implies that Comet Interceptor will probably be launched before the target is even discovered. The Comet Interceptor probe, composed of three spacecraft, i.e. S/C-A, S/C-B2 (provided by ESA) and S/C-B1 (provided by JAXA), will be parked in L2 and directed towards the selected target for a close flyby to be performed by S/C B1 and B2 and a far flyby by S/C A.
The Dust Impact Sensor and Counter (DISC) (Fig. 1), devoted to the dust coma characterization, is part of the payload selected for C I. It will be mounted on-board two of the three spacecraft, as part of the Dust-Fields-Plasma (DFP) suite, dedicated to study: 1) dust in the coma; 2) magnetic field; 3) plasma and energetic neutral atoms. The DISC architecture originates from the Impact Sensor subsystems, part of the Grain Impact Analyzer and Dust Accumulator (GIADA) that successfully flew on-board the ESA/Rosetta spacecraft.
DISC’s main scientific objectives are: 1) to define the dust mass distribution for particles in the mass range 10-15-10-8 kg ejected from the cometary nucleus; 2) to count dust particles with mass > 10-15 kg; 3) to constrain dust particle density/structure.
DISC’s sensing plate will be exposed to the cometary dust environment and subjected to Hyper-Velocity Impacts (HVI), due to the high fly-by speed (10 – 70 km/s). In this context, we conducted a study on DISC’s capabilities under HVIs and the energies associated with the expected cometary dust impact, in order to verify the instrument performances in the dust coma environment during the flyby. We have devised an approach implying different techniques/methods: 1) Numerical simulation of HVI on a simulated DISC sensing plate, 2) HVI of real projectiles on the DISC breadboard at the Light Gas Gun(LGG) facility, 3) HVI simulated by means of a high-power laser on the DISC breadboard.
We are going to present the results from the application of the first and second methods, which allowed us to compute the DISC response function and sensitivity, and the maximum rate of detectable impacting particles.
ACKNOWLEDGEMENTS
This research was also supported by the Italian Space Agency (ASI) within the ASI-INAF agreements I/024/12/0, 2020-4-HH.0 and 2023-14-HH.0, and the Europlanet project 20-EPN2-116 "HIDISCC (Hypervelocity Impacts for DISC Calibration)".
How to cite: Piccirillo, A. M., Della Corte, V., Rotundi, A., Inno, L., Bertini, I., Cozzolino, F., Ferone, A., Fiscale, S., Longobardo, A., Ferretti, S., Ammannito, E., Grappasonni, C., Sindoni, G., Wozniakiewicz, P. J., Alesbrook, L. S., and Burchell, M. J.: DISC-the Dust Impact Sensor and Counter onboard the comet interceptor/ESA space mission: performance evaluation through simulations and laboratory tests., Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1022, https://doi.org/10.5194/epsc2024-1022, 2024.
EnVision is ESA’s next mission to Venus in partnership with NASA, where NASA provides the Synthetic Aperture Radar payload and mission support. The mission was adopted in January 2024, entering phase B2/C/D/E. The launch is scheduled for 2031, and the start of the science operations at Venus is expected in early 2035 following the mission cruise and aerobraking phase around Venus to achieve a low Venus polar orbit. The scientific objective of EnVision is to provide a holistic view of the planet from its inner core to its upper atmosphere, studying the planets history, activity and climate. EnVision aims to establish the nature and current state of Venus’ geological evolution and its relationship with the atmosphere. EnVision’s overall science objectives are to: (i) characterize the sequence of events that formed the regional and global surface features of Venus, as well as the geodynamic framework that has controlled the release of internal heat over Venus history; (ii) determine how geologically active the planet is today; (iii) establish the interactions between the planet and its atmosphere at present and through time. Furthermore, EnVision will look for evidence of past liquid water on its surface.
The nominal science phase of the mission will last six Venus cycles (~four Earth years), and ~210 Tbits of science data will be downlinked using a Ka-/X-band communication system. The science objectives will be addressed by five instruments and one experiment, provided by ESA member states and NASA. The VenSAR S-band radar will perform targeted surface imaging as well as polarimetric and stereo imaging, radiometry, and altimetry. The high-frequency Subsurface Radar Sounder (SRS) will sound the upper crust in search of material boundaries for the first time. Three spectrometers, VenSpec-U, VenSpec-H and VenSpec-M, operating in the UV and Near- and Short Wave-IR, respectively, will map trace gases, search for volcanic gas plumes above and below the clouds, and map surface emissivity and composition. A Radio Science Experiment (RSE) investigation will exploit the spacecraft Telemetry Tracking and Command (TT&C in Ka-/X bands) system to determine the planet’s gravity field and to sound the structure and composition of the middle atmosphere and the cloud layer in radio occultation. All instruments have heritage and robust margins relative to the requirements, with designs suitable for operation in the Venus environment, and chosen to meet the broad range of measurement requirements needed to support the EnVision scientific objectives. The EnVision science teams will adopt an open data policy, with public release of the scientific data after validation and verification. Public calibrated data availability is <6 months after data downlink.
The scientific objectives, instrumentation, and status of the EnVision mission will be presented, including an overview of on-going scientific and technical maturity activities and the next steps in the mission preparation.
How to cite: Straume-Lindner, A. G., Pacros, A., and Schulte, M. and the EnVision Science Working Team and Project Team members: The EnVision Mission to Venus – concept, science and status, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1015, https://doi.org/10.5194/epsc2024-1015, 2024.
Introduction. The future exploration of Europa and other Ocean Worlds may involve the direct in situ access and characterization of ice crusts and subsurface liquid water using autonomous melt probes, called Cryobots. The Ocean Worlds Reconnaissance and Characterization of Astrobiological Analogs (ORCAA) project is a multi-institution effort, funded under NASA’s Planetary Science and Technology Through Analog Research (PSTAR) program. ORCAA aims to advance our understanding of cryosphere environments on Earth, enabled by planetary subsurface exploration technologies, while envisioning science operations for future icy subsurface access missions.
Objectives. Our overall objectives include the demonstration of subglacial lake access by a terrestrial Cryobot through two field work campaigns. We aim at sampling and analysis borehole melt and subglacial water to understand the evolution of icy habitable environments and the life they host. Through this work, we also aim to elucidate the importance of the hydrological connectivity that may permit nutrient migration and the establishment of habitable or inhabited niches in planetary ice shells. Uniting these science and technology demonstration objectives, we will demonstrate a science concept of operations by additionally simulating command cycles for a subsurface access science mission at Europa with a remote planetary Science Team. While no terrestrial glacier is a perfect physical, chemical, or biological analog to Europa, the Juneau Icefield offers diverse glaciated systems in which to study glacier microbiomes, hydrology and concept operations around melt probe deployment and icy sample handling (Fig. 1).
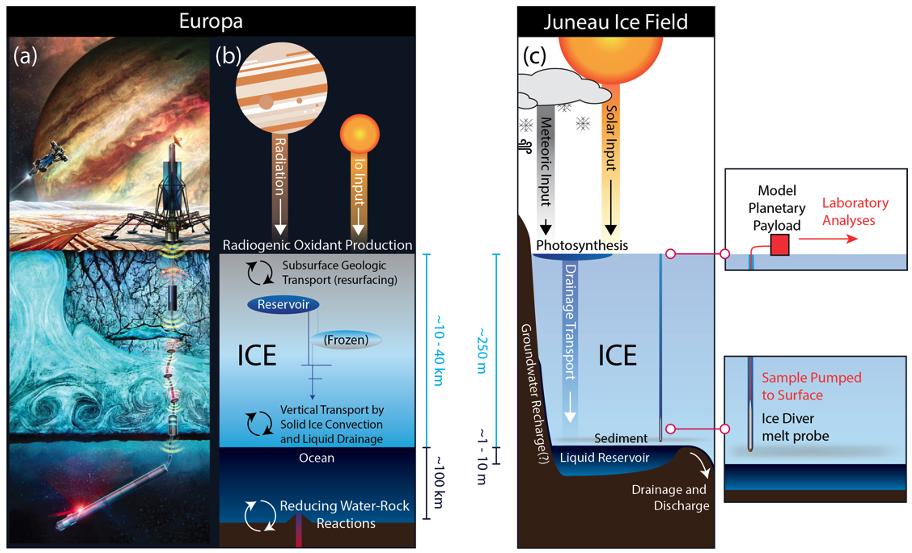
Figure 1: Comparison between Europa and the Juneau Icefield, AK, where the analogue Cryobot mission is conducted.
Methods. The ORCAA project comprises two field campaigns, in summers 2023 and 2025, on the Juneau Icefield. During the July 2023 field campaign, we successfully tested separately each aspect of the project. The camp was set up nearby supraglacial lakes (Fig. 2), which play an important part in glacier microbiomes. Geophysical reconnaissance was conducted using radar, and used to measure the glacier bedrock depth at the drilling site. We also conducted a full assessment of the 2025 drilling site, identifying the structure and depth of the subglacial lake we will access. The drilling was conducted using a hot water drill (Fig. 2), which will be replaced by a terrestrial Cryobot from the University of Washington, in 2025. Water sampling and analysis was conducted in several supraglacial lakes around camp, as well as in the borehole. Mission control and decision making was conducted in real time in 2023. Finally, we handled and documented logistics associated with field work in icy environments.

Figure 2: Right: Supraglacial lakes and science camp on the Juneau Icefield, AK. Left: Hot water drill used to reach the glacier bedrock.
Building upon this acquired knowledge, we will conduct a comprehensive Europa-analogue subglacial water access and characterization mission with the follow up 2025 field campaign. The terrestrial Cryobot and autonomous spooling and deployment system will handle melting and descent through the ice, as well as water sampling and pumping to the surface. Samples will be analyzed in a clean environment by a team of micro– and astrobiologists. We will simulate complete command cycles and cryobot autonomy to determine how and when scientists and autonomous systems discover indicators of change in the physical environment, habitability, and biological communities, and to characterize the temporal and spatial fidelity requirements of observations.
Acknowledgements. Portions of this research were carried out at the Jet Propulsion Laboratory, California Institute of Technology, under contract with the National Aeronautics and Space Administration (NASA). This work is supported by NASA’s Astrobiology program through Planetary Science and Technology from Analog Research (PSTAR) program (80NM0018F0613).
How to cite: Lesage, E., M. Howell, S., Campbell, S., Mikucki, J., Winebrenner, D., A. Cwik, T., Perl, S., Smith, M., Burnett, J., Clance, J., Clavette, R., Garner, M., Haq, S., Javier, B., and Holmes, J. D.: Onward to Planetary Ocean Access: The ORCAA Cryobot Analogue Mission to the Juneau Icefield, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1283, https://doi.org/10.5194/epsc2024-1283, 2024.
Please decide on your access
Please use the buttons below to download the supplementary material or to visit the external website where the presentation is linked. Regarding the external link, please note that Copernicus Meetings cannot accept any liability for the content and the website you will visit.
Forward to presentation link
You are going to open an external link to the presentation as indicated by the authors. Copernicus Meetings cannot accept any liability for the content and the website you will visit.
We are sorry, but presentations are only available for users who registered for the conference. Thank you.
MIST-A is the Middle-Wave Infrared (MWIR) Imaging Spectrometer that will be launched in 2028 aboard the Emirates Mission to the Asteroid belt (EMA). The mission will perform six fly-bys during its journey before reaching 269 Justitia in 2034. The main aim of the project is to study the asteroids' origin and evolution, focusing on the examination of the water, organic matter and minerals stored in them and their possible use as resources for future space exploration missions.
MIST-A operates in the 2-5 µm spectral range with a 9 nm/band sampling and its main objective is the identification of the asteroids' surface composition and thermo-physical properties. MIST-A's performances are specifically optimal to detect diagnostic spectral features of primitive asteroids, typically located in the 2.7-4.0 µm range, indicating the presence of hydrated minerals, organic matter, salts and carbonates.
The calibration process is a fundamental step to ensure the reliability of the measurements performed by the instrument.
MIST-A is composed by two units: the Optical Head (OH) and the Electronics Unit (EU).
The design of the OH was inherited from the JIRAM (Jovian IR Auroral Mapper) instrument. It consists of a modified Schmidt telescope equipped with a flat mirror on a 1-axis steerable mechanism at its entrance and joined to the entrance slit of a Littrow spectrometer. The Hybrid-Thinned HgCdTe photodetector of the spectrometer is housed in a thermomechanical structure that also accommodates order-sorting filters and a coldshield and that maintains a temperature < 90 K through an active cryocooler. The rest of the OH operates at a cryogenic temperature of 135 K, reached by means of a passive radiator. The OH is mounted on isostatic legs that thermally isolate it from the spacecraft and its external walls are covered by Multi-Layer Insulation (MLI).
The OH also houses the Internal Calibration Unit (ICU) which is mounted into the telescope's entrance baffle and consists of a flat diffuser with a golden coating illuminated by two IR emitters. A polystyrene filter is placed in front of these sources so that its absorption bands can be used as reference for checking the spectral response in flight.
The EU includes the power converter and distribution unit, the proximity electronics, the scan mirror drive and the CPU board, which contains the command and process control and the data compression software.
MIST-A's calibration campaign will cover the spectral, geometric, spatial and radiometric calibration processes and the characterization of the internal calibration sources.
During the spectral calibration we will characterize the instrument’s spectral responsivity and resolution and its full operative spectral range. The instrument’s boresight alignment, its field of view (FOV) and instantaneous field of view (IFOV) will be tested in the geometric calibration along with the scan mirror’s performances. To define the uniformity of the instrument’s response we will then perform flat-field measurements which additionally will help us check the presence of a vignetting effect. Finally, the radiometric calibration procedure will cover the characterization of the instrument's responsivity and Noise-Equivalent Spectral Radiance.
All these tests will be performed at the nominal OH and detector temperatures. Further measurements taken at warmer and colder temperatures will be used to characterize any observed deviation.
The laboratory setup currently under development in INAF-IAPS, Rome, for the calibration of MIST-A is an evolution of the configuration previously used for the JIRAM instrument.
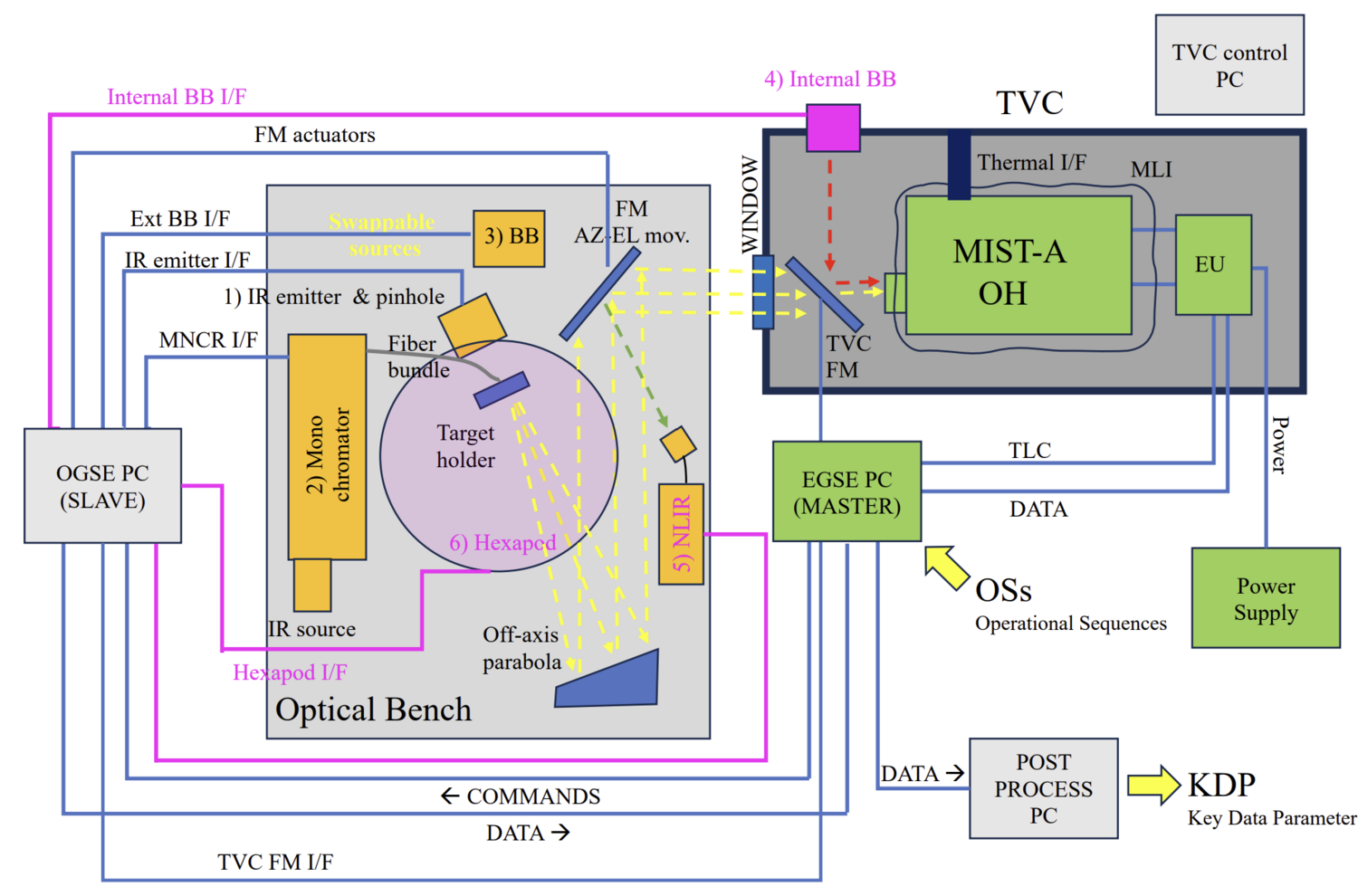
Fig. Laboratory setup used for the calibration campaign of the MIST-A instrument.
MIST-A's Optical Head and Electronics Unit are housed inside a thermo-vacuum chamber (TVC) which maintains their operating temperatures of 130-140 K. The EU is connected to the Power Supply placed outside the TVC.
MIST-A is controlled and monitored by means of the Electrical Ground Support Equipment (EGSE) with relative Master PC, which is electrically connected to the EU. The Optical Ground Support Equipment (OGSE) commands the devices mounted on the optical bench (e.g. folding mirror actuators, Black Body controller, monochromator) via Labview S/W and it can be used both as a standalone system for the characterization and tests of the optical bench, or coupled as a slave to the EGSE to control the bench through commands given by the Master. The EGSE is also connected to the Data Processing PC which receives and elaborates data from MIST-A and the optical bench.
An off-axis collimator is placed on the optical bench with its folding mirror and target holder structure which can support different targets and sources according to calibration requirements. The bench is mounted on a hexapod, operated through the OGSE, which can be used to traslate the optical beam within MIST-A's FOV while maintaining the folding mirror's alignment to the instrument's boresight.
The optical bench also houses the monochromator that will be used during the spatial and geometric calibration. This instrument is equipped with a IR source and its exit slit is coupled through a IR fiber bundle with the target holder on the collimator's focal plane. The configuration chosen for the radiometric calibration involves instead a black body placed inside the TVC and controlled by the OGSE. A movable folding mirror, commanded through the EGSE, redirects the black body's signal on MIST-A's entrance pupil.
Our team at INAF-IAPS is currently working on the integration and testing of the described optical bench setup. We will successively focus on the definition of the Calibration Plan and OGSE User Manual, which will include information on the calibration of the optical bench devices, before proceeding with the integration of the OGSE.
How to cite: Cencia, C. and the Team MIST-A: The calibration setup for the MIST-A IR spectrometer aboard the EMA mission, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-452, https://doi.org/10.5194/epsc2024-452, 2024.
The Mission Analysis and Payload Planning System (MAPPS) has evolved over the past two decades to meet the complex and dynamic planning requirements of various ESA planetary missions [1][2]. Originally designed solely for visualizing Mars Express experiment coverage on Mars, MAPPS now offers science planning capabilities for several missions, including Mars Express, ExoMars TGO (Trace Gas Orbiter), BepiColombo, Solar Orbiter, Juice (JUpiter ICy moons Explorer), and EnVision.
These missions present diverse and sometimes conflicting planning needs, such as contrasting power, data volume, or thermal requirements. For instance, Juice requires considerations for long-distance communication and thermal stability in cold outer regions, while BepiColombo prioritizes managing thermal loads and power generation due to its proximity to the Sun.
The primary tool available to the Science Operations Centres (SOC) in ESAC during the science planning process is MAPPS, that has been adapted to these complexities by becoming highly configurable and continuously updating to meet the unique demands of each mission. It operates by consolidating observation requests from the instrument teams, merging them into a comprehensive plan, and extensively simulating and modeling instruments to detect conflicts or constraint violations. The validated plan results in the generation of a multi-instrument operations timeline for uplink to the spacecraft's Mission Operations Centre (MOC).
Recently, MAPPS has included support for multi-body and constellation coordination, crucial for missions like Juice, which orbits Jupiter and its moons for extended periods. Adapting MAPPS for such missions required significant modifications to accommodate observations initially designed for a single central body. Additionally, MAPPS has facilitated collaboration with other Mars missions [3], enabling tasks like radio-science experiments between MEX-TGO [4], communication tests between ESA and NASA orbiters, or regular data relays in support of all surface assets.
Furthermore, MAPPS has been extensively used during the operations studies that were finalized with the adoption of EnVision, by providing essential information about instrument coverage, pointing, or resources consumption.
In summary, MAPPS plays a crucial role in ensuring efficient and conflict-free science planning processes by managing inputs, performing simulations, verifying constraints, generating output files, and executing supporting tasks. Here, we would like to present the main new features and capabilities that make this tool so powerful for science operations and mission analysis.
a) A snapshot of the graphical timeline for one of the Mars Express orbits. It conveys information about the instrument’s modes and actions, along with spacecraft pointing and downlink periods. b) In addition to the graphical timeline, it is possible to validate the planning using 3D visualizations. c) The swaths of the instruments, spacecraft trails, or landmarks can be configured and projected onto 2D maps.
REFERENCES
[1] P. van der Plas et al., MAPPS: a science planning tool supporting the ESA solar system missions, SpaceOps 2016 Conference, AIAA 2016-2512, https://doi.org/10. 2514/6.2016-2512
[2] Cardesin-Moinelo, A., Godfrey, J., Grotheer, E., Blake, R., Damiani, S., Wood, S., Dressler, T., Bruno, M., Johnstone, A., & Muniz, C. (2024). Mars Express: 20 Years of Mission, Science Operations and Data Archiving. Space Science Reviews, 220(2), DOI:10.1007/s11214-024-01059-0
[3] Cardesín-Moinelo et al., First year of coordinated science observations by Mars Express and ExoMars 2016 Trace Gas Orbiter, ICARUS 2021, https://doi.org/10.1016/j.icarus.2020.113707
[4] Cardesín-Moinelo et al. Coordination of Mars Express and Trace Gas Orbiter joint observations of the Martian atmosphere in 2021-2022. EPSC September 2022 Granada
How to cite: Muniz, C., Cardesin-Moinelo, A., Frew, D., de la Fuente, S., Felix, F., Ibarmia, S., Martin, P., Nespoli, F., Mahieux, A., Ashman, M., Lefort, J., and Valles, R. and the ESA Planetary Science Operations Centres: MAPPS: Multi-Mission Science Operations Planning Evolution and Adaptation, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-252, https://doi.org/10.5194/epsc2024-252, 2024.
ExoMars Trace Gas Orbiter (TGO) was launched by the European Space Agency in March 2016 and started operating around Mars in April 2018 after the nominal science orbit was reached. Four instruments are mounted on the spacecraft: The Atmospheric Chemistry Suite (ACS), the Colour and Stereo Surface Imaging System (CaSSIS), the Fine Resolution Epithermal Neutron Detector (FREND), and the Nadir and Occultation for MArs Discovery (NOMAD) instrument. The ACS and NOMAD instruments are dedicated to studies of the Martian atmosphere. The CaSSIS visible camera is equipped with a rotation mechanism allowing to acquire images of the same target with different viewing angle in the same overflight pass, enabling stereo images. Specific regions can be targeted by rolling the spacecraft in across-track direction. The FREND instrument requires nadir or near-nadir pointing during a large fraction of time to map the hydrogen abundance in the sub-surface.
The Science Operations Centre (SOC) based at the European Space Astronomy Centre (ESAC, Spain) is responsible for the implementation of science operation timelines, considering the instrument team requests and the mission's science priorities, while at the same time complying with spacecraft and operational constraints (B. Geiger et al., 2018, M. Ashman et al., 2018). We describe here the overall planning strategy for TGO and its evolution. The planning is divided into specific segments: long, medium, and short term, corresponding to 6-months, 4-weeks and 1-week planning periods. The strategy is set for a long-term planning period (LTP) and revised if/when necessary. For each 6-month or LTP period, the planning is such that solar occultations opportunities are computed for the overall period. On average, since the beginning of the mission, we find that a LTP period comprises ~3500 occultations opportunities amongst which ~60% are eventually scheduled. The scheduled occultation pointings are partitioned between the ACS and NOMAD instrument. Additionally, it is possible to indicate in the schedule that ACS can ride-along a percentage of prime occultations allocated to NOMAD.
Depending on the location at the surface and/or the Solar Longitude (Ls, i.e., the local season) the occultations can be considered with higher priority. Starting from MTP012 (in February 2019), occultations covering the equatorial regions were considered with highest priority. Thus, no other type of observations can be implemented during periods of equatorial occultations. Moreover, based on instrument teams requests a list of regions of interest (ROI) is also used to flag amongst the occultations opportunities the ones with high priority. This list was started during MTP020 in October 2019 and the last addition to the list is dated to April 2024. We do not exclude that this list will evolve in the future to respond to scientific requirements/discoveries. To this day, 7 ROIs are defined: Gale Crater, Jezero Crater, Green Valley, Utopia Planitia, Elysium Planitia, Alba Mons and Arsia Mons (for the detection of Elongated Clouds). Nominally, the instrument allocation for “highly valuable occultations” on ROIs is 50/50 between the ACS and NOMAD instruments while trying to get similar spatial coverage on each region for both instruments.
The CaSSIS instrument team provides a list of images (Nadir pointing or targeted pointing, the latter resulting in off-nadir angle) at Medium Term planning (MTP). On average ~2500 nadir images and ~1400 targeted images are acquired per LTP-period. Targeted images are important to fill gaps on the surface and/or to point to locations that cannot be reached while observing in Nadir mode. Although this puts constraints on the space-craft operations, the off-nadir angle allowed for these observations have recently been increased from 5 to 7 degrees to allow for better access to regions that can rarely be observed.
At MTP-level, other types of observations can be implemented. Mostly, observations that are not part of the standard repetitive pointing timeline and that result in large off-nadir angle. These specific observations, labelled as “Special Pointings”, are limited in number to 5 per STP (i.e., per week) due to their operational constraints. They correspond to calibration measurements, Phobos or Deimos observations and limb observations. Special pointing calibrations measurements were included in the planning strategy since the beginning of the mission with an allocation of 1 special pointing per STP. This number has increased with time (5 to this day) thanks to the scientific benefit of these pointings. The first limb measurement occurred in MTP014, in April 2019; the first Phobos measurement occurred in MTP045, in September 2021 and the first Deimos measurement took place in MTP049, in December 2021. The limb measurements are usually used by the NOMAD instrument to detect and characterise airglow (day- or night- glow) and auroras (Gérard et al., 2020a,b; Soret et al., 2022; Soret et al., 2023; Gérard et al., 2023). Recently, experimental measurements for limb observations with CaSSIS were also carried out. These CaSSIS observations are promising (Thomas et al., 2024) and are implemented as special pointings on the basis of ~1 per MTP. Based on instrument team requests, moon observations for ACS have stopped in May 2022.
Reference: B. Geiger et al., Long Term Planning for the ExoMars Trace Gas Orbiter Mission: Opportunity Analysis and Observation Scheduling, 2018 Space Ops. Conference; M. Ashman et al., Science Planning Implementation and Challenges for the ExoMars Trace Gas Orbiter, 2018 Space Ops. Conference; Gérard et al., 2020, Detection of green line emission in the dayside atmosphere of Mars from NOMAD-TGO observation, Nature Astronomy Letters; Gérard et al., 2020, First Observation of the Oxygen 630 nm Emission in the Martian Dayglow, GRL; Soret et al., 2022, The Mars Oxygen Visible Dayglow: A Martian Year of NOMAD/UVIS Observations, JRG Planets; Soret et al., 2023, The Ultraviolet Martian Dayglow Observed With NOMAD/UVIS on ExoMars Trace Gas Orbiter, JGR Planets; Gérard et al., 2023, Observation of the Mars O2 visible nightglow by the NOMAD spectrometer onboard the Trace Gas Orbiter, Nature Astronomy. N. Thomas et al., CaSSIS observations of atmospheric forward scattering from limb pointings, 2024, 10th Mars Conference.
How to cite: Riu, L., Geiger, B., Garcia Beteta, J. J., Grieger, B., and Operations Team, T. S.: Long-Term Planning strategy evolution for Trace Gas Orbiter (TGO) spacecraft, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-297, https://doi.org/10.5194/epsc2024-297, 2024.
The Miniaturized LIDAR for MARS Atmospheric Research (MiLi) project falls within the European Union funding program called Horizon Europe [1]. Within this general framework, the project being presented is classified under cluster 4 - Digital, Industry, and Space [2]. The investment in the different projects within this fourth point pursues the idea of global leadership of the European industry in key areas, through the development of competitive and trustworthy technologies. This sets the foundation for a competitive, digital, sustainable, and circular industry that allows for progress and innovation in global societal challenges.
The use of LIDAR in characterizing the Earth's atmosphere is widespread. These instruments use laser light to study the size and density of aerosol particles, making it logical to consider this solution to examine Martian aerosols (atmospheric dust and ice clouds). However, such instruments are typically large, heavy, and consume significant amounts of energy, making their use aboard planetary exploration modules a complex challenge. Designing and developing a miniaturized, low-power LIDAR for atmospheric research on Mars, which demonstrates the feasibility of a future characterization mission and increases the TRL level of the new technology developed, are the main objectives of the project [3].
One of the key aspects in a LIDAR instrument is the design of the receiver circuit for the emitted laser pulse, as it is responsible for both receiving the signal and carrying out its subsequent processing and transmission. In this project we explore the possibility of capturing the pulses through Si-PMT (Silicon Photomultipliers) known as MPPC (Multi-pixel Photon Counter). The proposed design has a dual functionality, as measurements will not only be taken at the time of laser pulse emission but also when it is off, this will allow for an exact characterization of the so-called dark pulses (electrical signals produced by the photodetectors in the absence of incident light). Understanding and characterizing them is of great importance since they directly affect the sensitivity and precision of the measurements carried out.
The design presented is based on an innovative solution that addressed the problem detailed as one of the main objectives: instrument compactness. In this, different signal distribution techniques, gain adaptation, EMI mitigation, as well as transmission of signals obtained from photodetectors over long distances are employed.
How to cite: Andrés Velasco, S., Rivas Abalo, J., Arruego Rodríguez, I., Vázquez Yáñez, G., Montalvo Chacón, S., Muñoz García, E., Martín Ortega, A., Jiménez Martín, J. J., García Menéndez, E., and Moya Señas, A.: Front-End Electronic for Miniaturized LIDAR Signal Conditioning, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-314, https://doi.org/10.5194/epsc2024-314, 2024.
Building a full picture of the atmospheric humidity at the Martian surface is crucial for understanding the Martian climate and its implications for the search for life on the red planet. Current humidity sensors on Mars measure the relative humidity (r.h.) with a typical accuracy of a few %r.h [1,2]. This is generally sufficient for determining the volume mixing ratio of water in the atmosphere when the temperature is low enough, however such sensors can run into difficulty when the temperature is higher and the r.h. drops below the sensor measuring threshold, for example during the day or in drier areas. It would therefore be advantageous to deploy a sensor on Mars which is capable of measuring trace levels of water vapour to fill in the gaps where relative humidity sensors reach their limit. A sensor has been developed at the Planetary Analogs Simulation Laboratory at the DLR in Berlin which could provide a compact solution to this problem.
The sensor is based on a coulometric principle and has exhibited excellent accuracy at low humidity levels (range 0.3 to 300ppmV) [3]. It consists of two interlocking comb shaped platinum electrodes printed onto an aluminium oxide substrate using thick film printing technology [4]. The electrodes are spatially separated and an additional glass barrier is deposited between the electrodes to avoid the possibility of a short circuit. The sensor is coated with a patented gel containing P2O5 [5], which is strongly hydrophilic and absorbs water from the surrounding atmosphere. Applying a voltage between the electrodes results in an electrolysis reaction with a current proportional to the water vapour content in the surrounding atmosphere. The reaction can be summarised as:
P2O5 + H2O → 2HPO3
2HPO3 → H2 + 1/2 O2 + P2O5
The sensor layout can be seen in figure 1, as well as the sensor connected to the electrical feedthrough of a CF-25 vacuum flange.
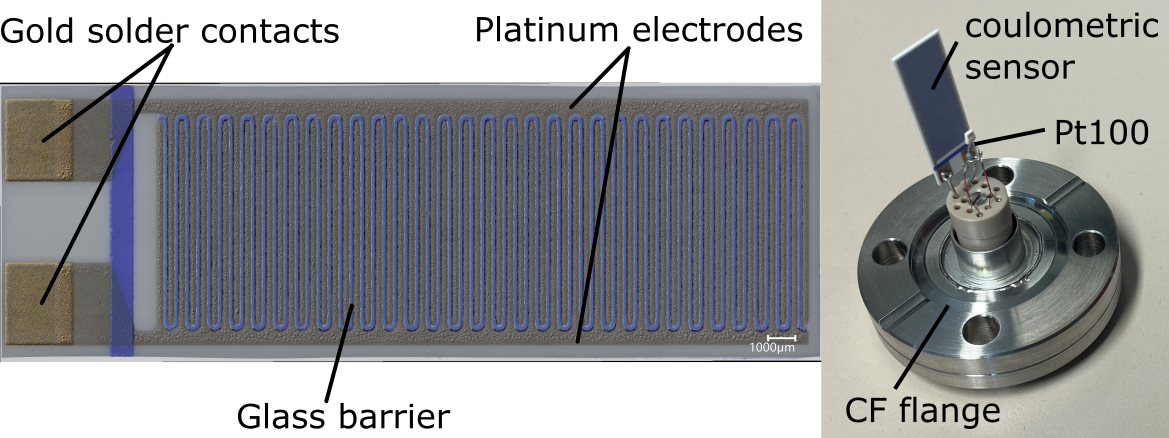
Figure 1. Left: Coulometric sensor developed at the DLR. Right: Coulometric sensor built into a measurement cell CF-25 flange with a Pt100 temperature sensor.
Tests are currently underway in CO2 atmospheres using the sensor calibration facility at PASLAB [6]. The facility has the capability of generating atmospheres of air and CO2 (among other gases), with humidities in a stepless way down to the order of 0.5 ppmV and temperatures down to -70°C. Measurement cells are available for atmospheric pressure and for vacuum measurements.
This contribution will provide details of the sensor design and functioning principle and show the results of tests under CO2 at a range of humidities, temperatures and pressures, providing a solid understanding of the behavior of the sensor in Martian atmospheric conditions.
Acknowledgments: Funding for the results presented in this contribution has been provided through the WIPANO program from the BMWi Deutschland (NORFEUGA-100477081).
References: [1] Hieta, M. et al. (2023) EGUsphere, 1823. [2] Hieta, M. et al. (2022) Planetary and Space Science, 223, 105590. [3] Tiebe, C. et al. (2018) tm - Technisches Messen, vol. 85, no. 12, pp. 746-753 [4] Lorek A. et al. (2010) Proceedings “Aquametry 2010”, Weimar, 289–296. [5] A. Koncz et al., Coulometrischer Feuchtesensor und entsprechendes Verfahren Patent EP2264445 B1 (2017). [6] Lorek et al. (2024) 55th LPSC, 3040.
How to cite: Garland, S., Lorek, A., and Helbert, J.: A trace humidity sensor for measurement of Martian atmospheric humidity, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-416, https://doi.org/10.5194/epsc2024-416, 2024.
The “Mars Magnetosphere ATmosphere Ionosphere and Space-weather SciencE (M-MATISSE)” mission is an ESA Medium class (M7) candidate currently in Phase-A study by ESA. M-MATISSE main scientific goal is to unravel the complex and dynamic couplings of the magnetosphere, ionosphere and thermosphere (MIT coupling) with relation to the Solar Wind (i.e. space weather) and the lower atmosphere of Mars. Among the set of instruments present onboard the platform, the Mars – Ion and Neutral Energy Analyzer (M – INEA) is an energy spectrograph and mass spectrometer specifically designed to image the low energy range of the neutral particles’ energy distribution (<10 eV) with a high energy resolution (~0.1 eV).
The innovative concept of this instrument consists in the use of an energy analyser capable of instantaneously imaging the energy spectrum of the particles entering the instrument. In addition, a time-of-flight mass analysis is also performed, allowing the mass to be determined simultaneously with its energy. Thanks to an End-to-End model developed with the software SIMION, the performances of the instrument were estimated. The model predicts a resolution in mass of ~22 and in energy better than 0.1 eV as well as a resolution in temperature and velocity better than 50K and 20 m/s respectively. With such capability, M-INEA could, for the first time, provide direct measurement of Mars’ neutral atmospheric escape rate and ultimately bring crucial information to understand the history of the Red Planet Atmosphere. Additionally, with the ability to instantaneously image the energy distribution along the ram direction of the spacecraft, the instrument is also able to measure the temperature and the drift velocity of the particles in the Martian upper atmosphere.
At the same time, we have been working on the development of an ion source, also necessary for the optimal operation of M-INEA, and based on the use of carbon nanotubes (CNT) as electron emitters instead of usual hot filaments. The measured efficiency of this source is comparable to that of sources using hot filaments in mass spectrometers flown on recent space missions, such as ROSINA on Rosetta or NGIMS on MAVEN. Cold emission by CNTs requires much less electrical power than hot filaments and prevents the detrimental instrumental effects due to the outgassing of the heated walls of the ion source and the space charge in high intensity electron beams. The longevity and stability of CNT cathodes are also demonstrated with a test including ∼700 h of continuous emission, showing only a drop of about 20% of the emitted (Steichen et al., 2024).
At present day, the first prototype of M-INEA has been assembled and is being tested at instrumental level. The results obtained during the test campaign will confirm the instrumental concept of M-INEA and give a first estimation of the real performances of the instrument.
How to cite: Steichen, V., Leblanc, F., Berthelier, J.-J., Guignan, G., and Ferreira, F.: Mars – Ion and Neutral Energy Analyser: A new instrumental concept to characterize Mars’ upper atmosphere, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-693, https://doi.org/10.5194/epsc2024-693, 2024.
The Juventas Radar (JuRa), a monostatic radar system designed to probe Didymos binary
system internal structure using a BPSK coded signal. A key component in ensuring the effective
operation of the JuRa system is the accurate matching of the dipole antenna impedance to the
power amplifier and receiver. In the transmitting path, the power amplifier performance is sensitive
to the loading impedance. For high efficient power amplifier this is a non-linear effect which is
challenging to model and simulate, especially for modulated signals. Calibration data obtained in a
standard 50-ohm environment would be therfore inaccurate.
Traditional deployment of antennas in an anechoic chamber for testing is not feasible due to the low
center frequency of 60 MHz as coupling with close objects and multiple reflections change
its frequency response. To address this challenge, we developed an antenna emulator device.
The antenna emulator device is engineered to present an equivalent antenna-like impedance
towards the transmitter, mimicking the behavior of the actual antennas used in the JuRa system
when deployed in space. This device is crucial for testing and calibration because deploying actual
antennas is impractical. Thus, the emulator provides a realistic impedance environment, ensuring
that the power amplifier operates under conditions that closely resemble those it will encounter in
space.
Additionally, the emulator is equipped with input/output interfaces for monitoring TX signals and
signal injection for RX testing. However, these interfaces exhibit a inadvertently non-flat frequency
response, necessitating the development of a mathematical model to correct for these discrepancies
through post- and pre-processing techniques. The mathematical model developed for the emulator's
input/output interfaces involves linear pre-and post-processing techniques, based on combination of
multiple measurement of the antenna emulator device and instrument.
The publication will detail the design process of the antenna emulator, including the theoretical
considerations and practical challenges (e.g. strong coupling with the solar panels) addressed during
its development. To facilitate testing during the assembly and integration (AIT) phases, we
developed a modified version of the emulator that can be used with non-deployed antennas. This
version allows for testing during the AIT without risking damaging the power amplifier by large
voltage standing wave ratio.
Finally the principles and techniques developed for the Juventas Radar antenna emulator can be
applied to other missions with low-frequency antennas facing similar testing challenges. By
providing a practical solution to the problem of testing low-frequency antennas without
environmental interference, our approach offers a valuable tool for future planetary and
interplanetary space missions.
How to cite: Laabs, M., Pfohl, T., Plettemeier, D., and Herique, A.: Development of an Antenna Emulator Device for the JuventasRadar Experiment on the HERA Mission, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-704, https://doi.org/10.5194/epsc2024-704, 2024.
Introduction
Saturn's moon Enceladus gained limelight with the discovery by the Cassini spacecraft of the plumes of ejected gas and ice particles from pronounced linear structures in its South Pole region called “Tiger Stripes". The small (504 km diameter) satellite is believed to have a porous rocky core and an ice shell, separated by a global subsurface saltwater ocean. The tidal heating potentially aids in driving chemical reactions in the moon’s interior which makes it a very promising candidate where the right conditions for life formation may exist. This makes Enceladus a prime target for a future mission. Due to strong gravitational perturbations caused by Saturn, the higher gravitational moments of Enceladus and additional perturbations by the other moons of Saturn, the dynamic environment for artificial satellites around Enceladus is extremely complex. As a consequence, the search for natural stable orbits is far from trivial. A polar orbit is desirable to further investigate the Tiger Stripes region, and for mapping of the global subsurface ocean.
Methodology
To calculate the spacecraft trajectories around Enceladus, all the relevant forces that are acting on the spacecraft are taken into account. We have used a numerical integrator which solves the general equation of motion of the spacecraft. Fig.1 depicts all the relevant perturbations, caused by the Sun, Jupiter, Saturn and its other moons, the higher degrees and order of Enceladus’ and Saturn’s gravity field and solar radiation pressure, which are taken into consideration. The drag experienced due to the plumes is considered negligible (Benedikter et al., 2022).
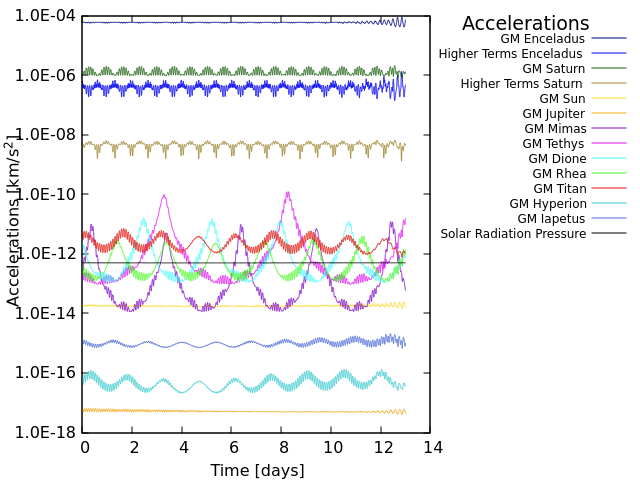
Fig.1. All the relevant accelerations experienced by the spacecraft in orbit around Enceladus at an altitude of 100 km from the surface.
Orbit Life Time Maps
We searched for suitable orbits in the inertial space by varying orbital parameters such as semi-major axis (350 to 450 km), inclination (40° to 120°), argument of periapsis and longitude of ascending node. The results are presented in the form of orbit life time maps. Fig.2 shows the orbit life time when we vary semi-major axis and inclination with respect to each other.
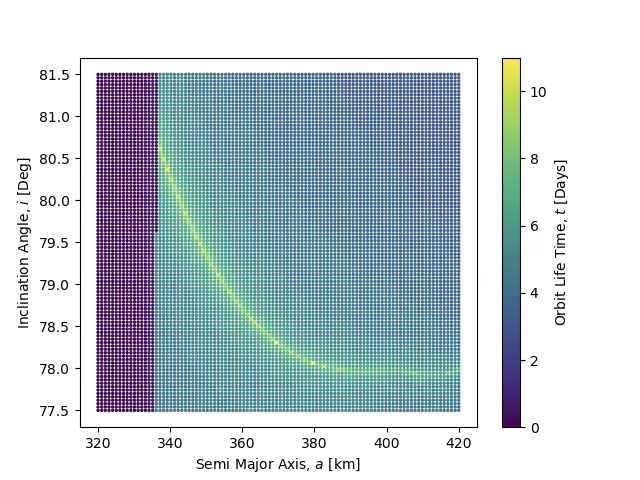
Fig.2 Orbit Life Time Map: The colour map shows the total life time of various orbits when Semi-Major Axis (320-420 km) and Inclination (77.5°-81.5°) are varied with respect to each other. The grid size of the map is 100 x 100.
Conclusions
Moderately inclined orbits (inclination between 45° and 60°) covering the equatorial and mid-latitude regions of Enceladus were found to be stable from several months up to years. In contrast, the more useful polar mapping orbits were found to be extremely unstable due to the so-called “Kozai mechanism”, due to which a spacecraft would impact the moon’s surface within a few days.
However, an example of a highly inclined orbit was found with inclination of approximately 79°, which had an orbital life time of approximately 13 days. A longer mission in this orbit would require correction maneuvers every few days. This would provide coverage of the tiger stripes region and allow for a global characterization of the ocean.
Orbit Control Strategy
We also determined the delta-v that would be necessary to maintain such an orbit over a mission of several months. This is a preliminary strategy which uses along-track manoeuvres only, i.e., accelerating or decelerating the spacecraft, to maximise the life time of the orbit. The budgets are assessed for an example reference semi-stable orbit solution and various correction manoeuvre frequencies, e.g., every 1, 2, and 4 days.
Also, special attention was paid to satellite formation flying in this orbit to maintain a stable baseline for a distributed radar sounder system (across-track formation of multiple satellites).
References
- Benedikter, A., et al. (2022) Acta Astronautica.
- Hussmann, H., et al. (2012) Planetary and Space Science.
- Ley, W., et al. (2009). Handbook of space technology.
- Enceladus, https://science.nasa.gov/saturn/moons/enceladus/
How to cite: Parihar, T., Hussmann, H., Wickhusen, K., Caritá, G., Stark, A., Oberst, J., Benedikter, A., Rodrigues Silva Filho, E., and Matar, J.: Numerical analysis of polar orbits for future Enceladus missions, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-707, https://doi.org/10.5194/epsc2024-707, 2024.
Deep space exploration is the main means for mankind to study the origin, evolution and current situation of the solar system and the universe, to further understand the formation and evolution of the earth's environment, and to understand the relationship between space phenomena and the earth's natural system. Deep space exploration, which mainly includes lunar exploration, planetary exploration, interplanetary exploration and interplanetary exploration, has become a new growth point and research hotspot, and is also the international research direction. Ultraviolet optical remote sensing (50-380 nm) load mainly detect targets include planets (include satellite of the planet, such as the moon, etc.),atmosphere and magnetosphere object surface, can obtain the traditional field and the particles in place observation is difficult to capture the full picture of the material and energy transport. UV remote sensing is an new important technology to study the solar system and its evolution, and it also can be used for searching extraterrestrial life information . Explorations on the probe of the project will focus on miniaturization, large dynamic, intelligent processing on-board and other special requirements. This project will study the miniaturization of wide spectrum of ultraviolet detection technology, submit a miniaturized wide spectrum imaging spectrometer prototype, spectrum covered 50-200 nm, 2-3 nm spectral resolution, weighing less than 4 kg. This project will fill the blank of the detection of deep space small ultraviolet imaging spectrometry in China, provides technical reserves for subsequent including planet detection, solar system marginal deep space exploration program.
How to cite: Fu, L.: Miniaturized Wideband Ultraviolet Imaging Spectrograph for Deep Space Exploration, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-714, https://doi.org/10.5194/epsc2024-714, 2024.
Introduction
Brushless DC (BLDC) motors and, in general, Permanent Magnet Synchronous Motors (PMSM), are ubiquitously used in space for robotics as well as other fine motion-control applications [1]. BLDC motors have a high torque density that is practically only limited by overheating. High torques require high currents, which heat up the windings through ohmic effects and, in addition, the increased amplitude of the alternating magnetic field causes the magnets to heat up due to eddy currents. The resulting excessive temperatures can permanently damage the isolation system or demagnetize the permanent magnets beyond the Curie temperature [2]. As robotic motion systems are usually optimized for torque density and accuracy instead of speed, commonly used actuators usually end up having a large gearbox and a small motor. This combination leads to large mass and inertia, and, as a result, sluggish performance. In fact, for a high-performance motion system, one would want to have large motors and small gearboxes instead. In high performance terrestrial robotics, liquid cooled actuators have demonstrated a previously unattained level of performance by avoiding the high temperatures associated with high currents [3] [4]. This study examines the possibility to have the same level of performance also for space robots, as pumped fluid loop cooling systems in general have extensive heritage in space engineering and thermal management [5] [6]. A liquid cooled drive has numerous possible applications in planetary exploration, for example as joints in robotic arms or as wheel or steering drives in rovers. Furthermore, an active thermal controlled actuator can ensure that the motion system remains in its operational temperature range, even in extreme temperature environments, for example permanently shaded regions at the lunar poles, enabling extended mission operations in such places.
Drive Concept
The proposed system consists of a custom BLDC motor with a single-phase liquid cooling system consisting of a motor-fluid heat exchanger, a pump, an accumulator, and a radiator. The motor can be complemented by several sensors and other functional components depending on the application. The thermal management system is flexible, expandable and allows for several actuators to be cooled by one fluid loop. A schematic of this architecture is depicted in the following figure.

Methodology and Results
This work presents a design study for a liquid-cooled robotic actuator by performing coupled multi-physics simulations that can model the drive system in the thermal, electrical, and mechanical domains. This holistic approach allows for an optimal design of the main components considering the complete coupled domain and size the motor and controller according to dynamic requirements (response time, step response, stiffness etc.). The results are used to analyze the influence of active thermal control on the motor performance (torque, power,
short-time as well as continuous) on component level and design an exemplary system for a specific application. The simulation model was verified by sub-scale thermal-vacuum tests of a commercially available BLDC motor.
Conclusion
In summary, active thermal controlled robotic joints have the potential to increase the performance of space robotics systems and can ensure optimal performance in exploration missions with adverse temperature ranges. This study investigates how this proven concept in terrestrial robotics can be applied to in-space applications and presents a simulation-based design methodology to perform preliminary design of such a system.
References
[1] NASA, “Selection of Electric Motors for Aerospace Application,” 01 Feb 1999. [Online]. Available: https://llis.nasa.gov/lesson/893.
[2] X. Wang, B. Li, D. Gerada, K. Huang, I. Stine, S. Worrall and Y. Yan, “A critical review on thermal management technologies for motors in electric cars,” Applied Thermal Engineering, vol. 201, 2022.
[3] T. Zhu, J. Hooks and D. Hong, “Design, Modeling, and Analysis of a Liquid Cooled Proprioceptive Actuator for Legged Robots,” in IEEE/ASME International Conference 2019, Hong Kong, China, 2019.
[4] A. Mazumdar, S. J. Spencer, C. Hobart, M. Kuehl, G. Brunson, N. Coleman and S. P. Buerger, “Improving Robotic Actuator Torque Density and Efficiency Through Enhanced Heat Transfer,” in ASME 2016 Dynamic Systems and Control Conference, Minneapolis, USA, 2016.
[5] D. Gilmore, Spacecraft Thermal Control Handbook, Washington, DC: The Aerospace Corporation, 2002.
[6] A. D. Paris, P. Bhandari and G. Birur, “High Temperature Mechanically Pumped Fluid Loop for Space Applications — Working Fluid Selection,” Journal of Aerospace, vol. 113, pp. 892-898, 2004.
How to cite: Witzel, T., Smolka, A., Plebuch, A., and Guenther, M.: Analysis of liquid-cooled Brushless Motor Actuators for Space Robotics, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-784, https://doi.org/10.5194/epsc2024-784, 2024.
Introduction. Flux calibration is a key procedure for the full scientific exploitation of the data acquired by planetary remote-sensing cameras. It is necessary to produce high quality, seamless, global and regional color and monochrome mosaics, which are pivotal for the geologic analysis of any planetary surface. It is also fundamental for the quantitative analysis of surface changes, space weathering effects, and for assessing the photometric properties of planetary regoliths. It consists of converting raw data (Digital Numbers, DN) to absolute physical units (W m−2 sr−1 nm−1 or I/F, i.e. the ratio between observed radiance and the radiance of a 100% lambertian reflector with the Sun and camera orthogonal to the observing surface) and requires sources with accurate spectral irradiances or integrated fluxes (i.e, magnitudes). The ESA-Gaia space mission (Gaia Collaboration et al. 2016) is collecting exquisite astrometry and photometry for about two billion stars brighter than G ≃ 20.5 since 2014 (Brown 2021). In the latest data release (Gaia DR3, Gaia Collaboration et al. 2023b), very low resolution spectra (XP spectra hereafter) have been released for the first time, for about 220 million sources (De Angeli et al. 2023). Gaia Collaboration et al. (2023a) demonstrated that remarkably accurate and very precise synthetic photometry can be obtained from flux-calibrated (Montegriffo et al. 2023) XP spectra virtually for any passband whose wavelength range is entirely enclosed within 330 nm≤ λ ≤ 1050 nm. This opens for the first time the possibility to get precise space-based all-sky photometry for a huge number of stars to calibrate the photometric systems of other surveys in the optical range, operating both from space or from the ground. Indeed, synthetic photometry from XP spectra (XPSP hereafter) has been already used for calibration and validation of various photometric surveys (see, e.g., Martin et al. 2023) and is becoming a fundamental photometric reference in the optical domain. In this paper, we assess the potential of using Gaia XPSP for the absolute flux calibration of a planetary remote sensing camera by taking the SIMBIO-SYS instrument on the ESA/JAXA BepiColombo mission as a test case.
Data & Methods. We obtained synthetic photometry in the SIMBIO-SYS photometric system by convolving both XP spectra and well calibrated spectra (hereafter referred as “reference spectra”) from three different libraries of spectrophotometric standard stars through the filter passbands, wavelength dependent detector quantum efficiency, and wavelength dependent mirror reflectivity. We considered the Gaia Spectro Photometric Standard Stars (SPSS; Pancino et al. 2021), The Passband Validation Library (PVL; Pancino et al. 2021), and the latest version of the CALSPEC library (Bohlin et al. 2020). The latter is entirely made of space-based spectra and is generally considered as the best reference stellar flux scale. For each standard, we compare the SIMBIO-SYS synthetic photometry calculated from the GAIA XP with the corresponding synthetic photometry coming from the reference spectra.
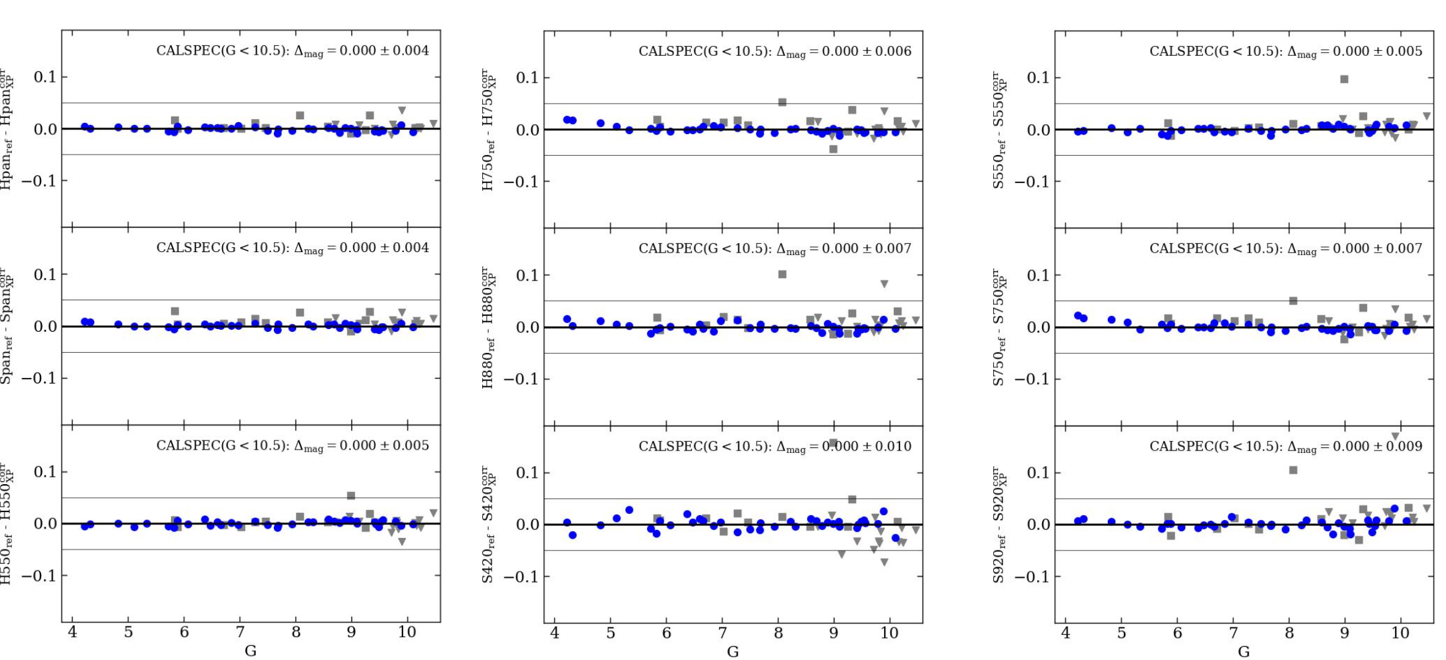
Figure 1. Difference between synthetic magnitudes computed from the spectra of the adopted reference set of spectrophotometric standards (magref) and those computed from Gaia XP spectra and corrected for systematics (magcorrXP) for the STC and HRIC filters. Grey triangles are SSP stars, grey square PVL stars and blue circles are CALSPEC stars. The thin horizontal lines enclose the ∆mag = ±0.05 range. The mean and standard deviation of the magnitude difference for the 37 CALSPEC stars having G<10.5 is reported in each panel.
We applied corrections to the original raw XP magnitudes to remove small residual systematics with respect to the CALSPEC reference flux scale. In the following we only refer to these as corrected XP magnitudes.
Results & Discussion. Differences between the synthetic magnitudes computed from the reference spectra of the spectrophotometric standards (magref) and the corresponding corrected XP magnitudes (magcorrXP) as a function of G magnitude and for all the STC and HRIC filters are shown in Fig. 1. We evaluate the average residual (i.e., the accuracy) and their standard deviation (i.e., the precision), on the CALSPEC standards. The mean difference is < 0.001 mag, hence the XP magnitudes in the SIMBIO-SYS system reproduces the CALSPEC photometry with a mean accuracy better than 0.1%. The standard deviation depends on the filter, ranging from 0.004 to 0.010 mag. Hence the corrected XP magnitudes in the SIMBIO-SYS system reproduces the CALSPEC flux scale with a precision < 1%. The calibrated SIMBIO-SYS photometric system is now defined by the XP magnitudes in the SIMBIO-SYS passbands of the standard stars in the SIMBIO-SYS selected fields. To conclude, we show that the availability of high photometric quality Gaia stars can be exploited for providing accurate (below 1%) radiometric calibrations of planetary cameras. For SIMBIO-SYS, in particular, such highly accurate photometry will allow to improve the quality of image mosaics and the quantitative analysis of possible current ongoing surface activity on Mercury, for which SIMBIO-SYS will provide new data after a timespan longer than a decade. Finally, the methodology presented in this paper can in principle be used and evaluated also for other planetary cameras that will explore the Solar System in the next years.
Acknowledgements. MM, MB and PM acknowledge the financial support to activities related to the ESA/mission by the Italian Space Agency (ASI) through contract 2018-24-HH.0 and its addendum 2018-24-HH.1-2022 to the National Institute for Astrophysics (INAF). The study has been supported by the Italian Space Agency (ASI-INAF agreement no. 2020-17-HH.0).
References
Brown, A. G. A. 2021, ARA&A, 59, 59
Gaia Collaboration, Montegriffo, P., Bellazzini, M., et al. 2023a, A&A, 674, A33
Gaia Collaboration, Prusti, T., de Bruijne, J. H. J., et al. 2016, A&A, 595, A1
Gaia Collaboration, Vallenari, A., Brown, A. G. A., et al. 2023b, A&A, 674, A1
De Angeli, F., Weiler, M., Montegriffo, P., et al. 2023, A&A, 674, A2
Montegriffo, P., De Angeli, F., Andrae, R., et al. 2023, A&A, 674, A3
Bohlin, R. C. 2020, in IAU General Assembly, 449–453
Pancino, E., Sanna, N., Altavilla, G., et al. 2021, MNRAS, 503, 3660
Martin, N. F., Starkenburg, E., Yuan, Z., et al. 2023, arXiv e-prints, arXiv:2308.01344
How to cite: Munaretto, G., Cremonese, G., Bellazzini, M., Montegriffo, P., Sordo, R., La Grassa, R., Re, C., Tullo, A., and Messineo, M.: Using Gaia for the flux calibration of planetary cameras: the BepiColombo/SIMBIO-SYS case, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-804, https://doi.org/10.5194/epsc2024-804, 2024.
M-MATISSE is an ESA Medium class candidate (M7 call) in phase A study. M-MATISSE would place two spacecraft in orbit around Mars to study the solar wind – magnetosphere – ionosphere – atmosphere coupling at the red planet. Amongst the comprehensive payload of M-MATISSE, the Mars Ensemble of Particle Instruments (M-EPI) includes a low-energy neutral and ion detector, an electron spectrometer, and a medium-energy particle instrument.
For M-MATISSE and the M-EPI package, IRAP and its partners are developing the Solar Particles @ Mars (SP@M) experiment to study 30 keV to 1 MeV electrons and 30 keV to 10 MeV ions. The main scientific objective of SP@M is the characterization of Solar Energetic Particles (SEPs) and suprathermal particle populations throughout the Martian magnetosphere and atmosphere. This characterization is essential to understand atmospheric escape, SEP-induced aurorae, and radar blackouts. It would also advance the assessment of radiation risk for future robotic and human missions to Mars.
SP@M would employ 8 detection units per spacecraft, 4 dedicated to electrons and 4 to ions. Each detection unit would use a single thick SSD (thickness of 1 to 1.5 mm) suitable for the targeted energy range. In this presentation, we will introduce the phase A activities of the instrument, including the mechanical and electronics design of SP@M, the electron-ion discrimination strategy, and simulations of the expected performances.
How to cite: Nenon, Q., Devoto, P., André, N., Thomas, V., Prech, L., Němec, F., and Sanchez-Cano, B.: SP@M: a medium-energy particle detector for the M-MATISSE mission, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-809, https://doi.org/10.5194/epsc2024-809, 2024.
Dragliner [1, 2] is an ESA funded study to define the requirements and a preliminary design of a passive Coulomb Drag based deorbit system capable of bringing down LEO spacecrafts in an order of magnitude shorter time than the current regulations for the re-entry time for the spacecraft (25 years), while using significantly less spacecraft resources compared to traditional deorbiting methods like chemical or electric propulsion. Other main requirements for the deorbiting system are low mass and independence from the spacecraft resources. The study is led by Finnish Meteorological Institute, and the other consortium partners are Aurora Propulsion Technology, GRADEL sarl and SpaceR-SnT/University of Luxembourg. The current goal for Technology Readiness Level of the project is 4.
The Dragliner system utilizes a Coulomb Drag microtether, also known as a plasma brake), i.e. tether that utilizes momentum from ionospheric plasma ram flow by electrostatic interaction [3, 4]. In this project, microtether is defined as a tether that does not exceed the mass limit of 200 milligrams per length of 1 meter, which makes it safe to other space assets in the event of a collision (the energy of collision is comparable to micrometeroid impact).
The main mission requirements for the Dragliner are:
- Dragliner shall be able to deorbit a Low Earth Orbit satellite (uncontrolled re-entry) of max. 250 kg mass to 400 km altitude. If the original orbit height is less than 850 km, the deorbit time shall be less than 2 years, with the goal of less than 100 days.
- Dragliner shall be an autonomous, passive bolt-on device that does not use spacecraft resources after it has been triggered to deploy by a ground command. After deployment the host spacecraft does not need to be active.
- The mass fraction of Dragliner to the host spacecraft shall be lower than 5%.
- The reliability of the whole system shall be better than 95%, and the risk of premature deployment less than 0.1%.
Coulomb drag deorbiting time depends on the combination of spacecraft’s mass, orbit height and length of the microtether. To achieve the required deorbiting time for 250 kg spacecraft from 850 km, 10 km long microtether is needed. Currently the practical limit for microtether length is 5 km, so in this case the tether is divided into two separate modules, with 5 km of tether each.
The Main Tether of Dragliner must be electrically conductive to allow electrical charging that enables the Coulomb Drag effect, and tolerant to micrometeoroid impacts. The Dragliner tether is manufactured at Finnish Meteorologial Institute from 4 Aluminum wires of 50 um diameter, mechanically twisted to form a “Hoytether-like” structure [5]. With this configuration, the risk of complete severance of a 5-km tether during 1 year in orbit is low enough to fulfil the 95% reliability requirement of the full Dragliner system.

Figure 1: 4-wire tether from 50 um Al 2024 wire produced by FMI manual tether factory
In addition to kilometers long Main Tether, Dragliner contains also a significantly shorter (tens of meters) conductive Tape Tether that serves as an electron collecting surface for the operation of the Main Tether.
One Dragliner module consists of a Base Unit containing mechanical and electrical interfaces to the spacecraft, and a Remote Unit housing the tethers and the electronics. The size of the Remote Unit is equivalent to 3U CubeSat. During the operational lifetime of the spacecraft, Dragliner remains in stowed configuration, relying on the spacecraft for power and communications via umbilical connectors. When the spacecraft decommissioning starts, the Dragliner system shall be commanded to deploy. All Dragliner functions after the deployment signal has been given will be autonomous.
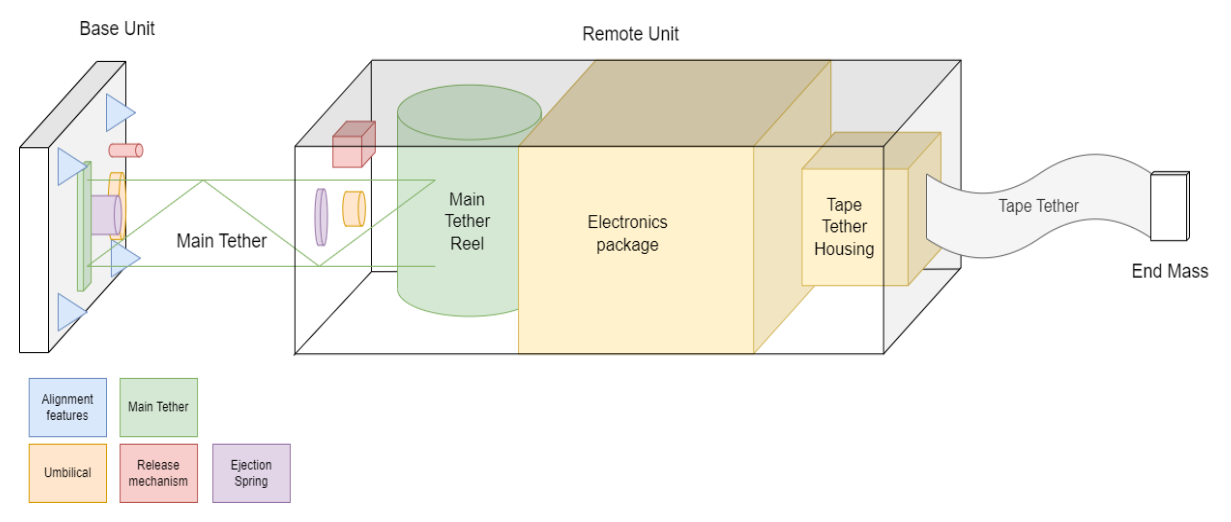
Figure 2: Physical architecture of Dragliner (not in scale)
In the beginning of the deployment process, as the Remote Unit is released from the Base Unit, the umbilical electrical connectors to the spacecraft are severed, and Dragliner starts to operate completely autonomously, including mechanical deployment of the tethers and harvesting its own energy with solar panels attached to the sides of the Remote Unit. After the deployment (lasting a few hours) is completed, the Deorbit System charges the Main Tether with ∼1 kV high voltage, enabling the Coulomb Drag effect and deorbiting of the spacecraft. The spacecraft does not need to be operational during the deorbiting phase.
The Dragliner project has passed its System Requirements Review and Preliminary Design Review in 2023. The deployment of the Main Tether (scaled-down length) and the Remote Unit, which is one of the critical functions of Dragliner system, is tested with a Dragliner Breadboard model in Zero-G lab of SpaceR-SnT/University of Luxembourg. The lab is is designed to emulate space related scenarios under microgravity conditions [6, 7]. The tests are scheduled for May 2024. In the tests, the Base Unit will be attached to a floating platform and the Remote Unit to a stationary robotic manipulator. When the deployment is executed, the freely floating platform with the Base Unit will start to move away from the Remote Unit simultaneously deploying the Main Tether. The deployment length is limited by the room dimensions.
The Dragliner project is carried out under a programme of and funded by the European Space Agency under the ESA Contract No. 4000138811/22/NL/MM/fm.
[1] Genzer, M. et al. Project DragLiner: harnessing plasma Coulomb drag for satellite deorbiting to keep orbits clean, EGU23-14692
[2] Peitso Pyry et al. Plasma Brake for Deorbiting Telecommunication Satellites, SP2024_paper #490
[3] Janhunen P., Electrostatic plasma brake for deorbiting a satellite, J. Prop. Power, 26, 370-372, 2010.
[4] Janhunen, P., Simulation study of the plasma-brake effect, Ann. Geophys., 32, 1207-1216, 2014.
[5] Toivanen P. et al, Robust Flight Tether for In-Orbit Demonstrations of Coulomb Drag Propulsion, Aerospace 2024, 11(1), 62
[6] M. Olivares-Mendez et al. Zero-g lab: A multi-purpose facility for emulating space operations. Journal of Space Safety Engineering, pages 509 – 521, 2023
[7] B. C. Yalcın et al. Lightweight floating platform for ground-based emulation of on-orbit scenarios. IEEE Access, pages 94575 – 94588, 2023.
How to cite: Genzer, M., Janhunen, P., Yli-opas, P., Peitso, P., Haukka, H., Hieta, M., Laurila, H., Pietikäinen, P., Hallamaa, H., Sinkko, J., Toivanen, P., Polkko, J., Yalcin, B. C., Olivares-Mendez, M., and Macieira, D.: Dragliner – Tether Based System for Passive Spacecraft Deorbiting Using Coulomb Drag, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-852, https://doi.org/10.5194/epsc2024-852, 2024.
The exploration of planetary surfaces is fundamental to our understanding of planetary evolution, habitability, and the origin of life. The chemical composition is typically amongst the main scientific goals of planetary exploration missions. Current orbital space instruments for probing chemical composition of planetary surfaces such as VIRTIS on Rosetta and NIRS3 on Hayabusa-II rely on classical infrared spectroscopy to measure minerals and organic matter. However, spectrometers for space exploration are more limited in resolution and bandwidth due to constraints in mass, size, power consumption, thermal stability, and space-graded material availability than what can be achieved in a laboratory environment with prepared samples. Beyond these engineering constraints, classical spectroscopy is also intrinsically limited in measuring chemical bonds and not the molecular structure of a given compound.
Alternatively, mass spectrometers such as COSAC on the Philae lander [5], SAM on the Curiosity rover [3], and MOMA on the Exomars rover [1] can deliver outstanding sensitivity, but at the expense of payload mass, instrument complexity, and the destruction of the sample during measurement. As a result of these constraints, these instruments are primarily suited for a select few mission profiles, notably flagships or large-class mission architectures. Furthermore, COSAC, SAM, and MOMA are currently the only space instruments capable of measuring chirality - the proportion of left vs right handed enantiomers in a sample. While studying these enantiomeric ratios provides key data in the context of prebiotic chemistry and understanding the emergence of homochirality on Earth, these instruments can only make a handful of measurements of this kind over their lifetime. Additionally to the limited number of uses of the chiral columns in the gas-chromatographs (GC), this technique is suitable for volatile compounds excluding chiral targets of interest such as amino acids.
In response to these limitations, we present a novel approach to planetary surface spectroscopy, leveraging polarization as an additional observable to complement traditional spectroscopic techniques and mass spectroscopy chirality measurements. Introducing the Chirality Analyzer In-Situ (CHAIS), a near-infrared optical bench (1.5 - 4.0 um) specifically designed to measure Vibrational Circular Dichroism (VCD) for planetary exploration—a technique well-established in terrestrial chemistry and pharmaceutical laboratories. The objective of CHAIS is to validate this approach through measurements in a true-to-life configuration using planetary analogs, with the aim of assessing the sensitivity thresholds necessary for the development of a space-optimized version of the instrument. By analyzing linear and circular polarization signatures as a function of wavelength, CHAIS is anticipated to enable the non-destructive characterisation of the typically featureless felsic primordial crust minerals present on planetary bodies like the Moon and Mars. The addition of polarimetry to CHAIS not only enhances the capability to discern certain molecular structures while measuring chirality, but also takes advantage of the instrument's relative simplicity and the absence of required sample preparation, enabling a higher number of measurements.
Beyond composition analysis, CHAIS, as the name suggests, is built to measure chirality. Our approach would allow for the measurement of enantiomeric excess and homochirality (100\% enantiomeric excess) which paves the way towards a robust biosignature detection tool. Additionally, other existing spectropolarimeters, such as TreePol [4] and LSDpol [2], operate in the visible spectrum using different methodologies, yet similarly demonstrate the use of optics for detecting chirality and biosignatures. Ultimately, this integration of polarimetry into classical infrared spectroscopy will enable the non-destructive characterisation of a wide variety of planetary surfaces and the development of a new type of space instrument optimized for exploring and understanding the origin and formation of biotic matter.
Racemic abiotic samples like plastic films as well as Mars analogs such as gypsum have been measured in transmission as part of the first test cases to validate the bench. Preliminary spectroscopy data is shown in Figure 1. In this work we present initial findings with CHAIS including first light results, first spectroscopy and spectro-polarimetry data from a variety of biotic and abiotic samples, as well as the next steps towards a point-and-shoot space instrument of adequate sensitivity to characterise the chemical composition and chirality of surface minerals.

Acknowledgments
This research is co-funded by the Centre National d’ ́Etudes Spatiales (CNES) and the Aix-Marseille Origines Institute
through the A*MIDEX Program.
References
[1] Fred Goesmann et al. “The Mars Organic Molecule Analyzer (MOMA) instrument: characterization of
organic material in martian sediments”. In: Astrobiology 17.6-7 (2017), pp. 655–685.
[2] Christoph U Keller et al. “Design of the life signature detection polarimeter LSDpol”. In: Space Telescopes
and Instrumentation 2020: Optical, Infrared, and Millimeter Wave. Vol. 11443. International Society for
Optics and Photonics. 2020, 114433R.
[3] Paul R Mahaffy et al. “The sample analysis at Mars investigation and instrument suite”. In: Space Science
Reviews 170 (2012), pp. 401–478.
[4] CH Lucas Patty et al. “Circular spectropolarimetric sensing of chiral photosystems in decaying leaves”.
In: Journal of Quantitative Spectroscopy and Radiative Transfer 189 (2017), pp. 303–311.
[5] Stephan Ulamec, Fred Goesmann, and Uwe Meierhenrich. “Philae Landing on Comet 67P/Churyumov-
Gerasimenko–Planned Chirality Measurements and Ideas for the Future”. In: (2018)
How to cite: Krasteva, M., Carter, J., Madec, F., Challita, Z., Vinogradoff, V., d'Hendecourt, L., Groussin, O., and Brunetto, R.: CHirality Analyzer In-Situ (CHAIS) - A Novel Approach to Planetary Surface Characterisation, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-881, https://doi.org/10.5194/epsc2024-881, 2024.
BELA is the laseraltimeter of the ESA BepiColombo mission which was launched in 2018 and is currently on its way to Mercury and will arrive there in 2025, mission start is scheduled for early 2026. BELA is one of 11 instruments aboard the MPO (Mercury Planetary Orbiter) and the first laseraltimeter used on an interplanetary european mission. The main goal of BELA will be to provide a global topography map of Mercury, also to analyse the surface structure in terms of roughness and slopes, as well of measurements of the albedo.
Since launch in October 2018 BELA was operated several times, namely during the NECP (Near Earth Commisioning Phase), 11 CCO (Crusie Checkout), during Mercury Flyby 3 and for SSMM (Solid State Mass Memory) test.
We will present an overview of BELA, the main scientific goals, performance simulations and the results from operations so far.
This includes the analysis of the received TM data to check if the instruments worked correctly.
Also the poster will include the presentation of the used GRM (ground reference model) at DLR.
How to cite: Luedicke, F., Hussmann, H., Thomas, N., Wickhusen, K., Stark, A., and Gwinner, K.: BELA - Laseraltimeter of the BepiColombo Mission, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1104, https://doi.org/10.5194/epsc2024-1104, 2024.
Past and present Mars orbiters have been able to provide great information on Mars surface and atmosphere, focusing mostly on targeted high resolution measurements but lacking continuous global coverage. However, Mars atmospheric phenomena (clouds and dust storms in particular) and space weather environment require continuous, simultaneous, global observations to fully understand the dynamic variability and extension of meteorological and environmental conditions at Mars [Montabone, 2021]. In the next decade, spacecrafts monitoring Mars will embark on a new generation of instruments.
In a collaboration between the Royal Belgian Institute for Space Aeronomy (BIRA-IASB) and the Lambda-X company, an instrument for future Martian orbiter missions, MIDIM is being developed. The “Mars Imager for Dust and Ice clouds Monitoring” will be a multispectral band UV imager able to monitor dust and ice clouds.
Dust and ice clouds are key compounds in the Martian climate as they modulate the dynamical and thermal structure of the atmosphere. They absorb and scatter sunlight, which can result in local warming or cooling of the atmosphere. A constant monitoring of aerosols around Mars would help us to assess the physical processes that control the onset, growth and decay of dust storms, the interannual variability of global dust storms, the global budget of dust and its evolution over time, as these processes are not yet fully understood in the martian atmosphere [Kahre, 2024]. The impact on the water ice cycle also needs to be better constrained.
The MIDIM imager will have an extended field of view covering a large portion of Mars, depending on the orbit of the spacecraft. It will be suited for high altitude or stationary orbits. The instrument design will be partly based on the heritage of the NOMAD/UVIS instrument [Patel et al., 2017] on board ExoMars Trace Gas Orbiter, using the same CCD camera, as well as in state-of-the-art CubeSat compatible optical design solutions [Schifano 2022]
The NOMAD/UVIS dataset is used in this work to assess the science requirements related to the objectives of this instrument [Willame et al. in prep, Willame et al. 2017]
In the poster, we will present our progress about the design and preliminary studies of the MIDIM development.
References
Kahre (2024), Dust on Mars. Oxford Research Encyclopedia of Planetary Science, Oxford University Press, article id. 119.
Montabone (2021), A Paradigm Shift in Mars Meteorology. EPSC 2021, 625.
Patel MR et al. (2017) NOMAD spectrometer on the ExoMars trace gas orbiter mission: part 2—design, manufacturing, and testing of the ultraviolet and visible channel. Appl Opt, AO 56:2771–2782
Schifano L. et al. (2022) Freeform Wide Field-of-View Spaceborne Imaging Telescope: From Design to Demonstrator. Sensors 2022, 22, 8233.
Willame et al. in prep. Dust and ice cloud retrieval from NOMAD/UVIS.
Willame et al. (2017). Retrieving cloud, dust and ozone abundances in the Martian atmosphere using SPICAM/UV nadir spectra Planet. Space Sci., 2017. 142: p. 9-25.
How to cite: Willame, Y., Robert, S., Pereira, N., Antoine, P., Lecat, J.-H., Ligot, R., Vandaele, A. C., and Bolsée, D.: MIDIM, an UV imager for the monitoring of aerosols for future missions to Mars, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1159, https://doi.org/10.5194/epsc2024-1159, 2024.
The present communication is based on preliminary results within the PRIN 2022 PNRR project entitled “Low-cost, high-safety hydrogen storage into chemically-enhanced clathrate hydrates for energy storage in planetary infrastructures” (Brave New Worlds, CUP D53D2301693000, funded by the European Union – Next Generation EU) led by the University “G. d’Annunzio” of Chieti – Pescara, with the collaboration of University “Aldo Moro” of Bari, and the National Institute for Astrophysics of Catania (INAF) as research units. The aim of the project “Brave New Worlds” is to develop low-cost, high-safety media for the storage of hydrogen, which also have minimal technologic and maintenance requirements. Target storage media will be ideally suitable for space-based infrastructures on near planets (e.g., Mars) or satellites (e.g., Moon), where hydrogen will be produced from planetary water bodies by solar cell-powered electrolysis.
Currently, hydrogen is stored in pressurized cylinders, metal hydrides and similar compounds that require high energy consumption to store and recover H2, or in liquefied form. None of those storage technologies are suitable for planetary infrastructures, because of the high spacecraft payloads needed to carry cylinders, compressors, metallic media and other highly technological devices to be deployed and assembled in situ. Furthermore, the control of the compression of hydrogen into cylinders, or the temperature cycles for the sorption onto metal hydrides, or for liquefaction, require sophisticated, failure-prone control appliances.
The storage media developed in the present work are clathrate hydrates of hydrogen, a class of supramolecular solids consisting of water molecules organized in cage structures that can host one or more gas molecules. These systems represent a safer, technologically simpler, and cheaper alternative for large-scale hydrogen storage than traditional storage methods. Clathrate hydrates are usually formed under conditions of pressures around 5-10 MPa and temperatures of around 250-280 K, or, importantly for the present case, under lower pressures and very low temperatures.
Thus, important features that we are exploiting are the following:
- clathrate hydrates are essentially made up of water, an economical, ecological and safe compound par excellence. Having a potentially infinite life cycle, water is an ideal material for this purpose.
- Water is found on (or just below) planet and satellite surfaces.
- Sun-shaded or deep crater areas of planets and satellites reach temperatures as low as 30 K
- Hydrogen hydrates can form at very low temperatures under mild gas pressures
In the present work, we show how to overcome some critical points of hydrogen storage in clathrates, namely (i) slow capture kinetics, and (ii) low gravimetric content. As for point (i), here we report processes and molecules for improving the kinetics of the process of 1-2 orders of magnitude. The increase of the gravimetric content (point (ii)) has been addressed with the design and test of stabilizers (co-formers) of the hydrate cages, through a combination of rational design, quantum mechanical and molecular dynamics approaches, stochastic methods, and chemical synthesis. Preliminary results reported in the present contribution are: (i) the thermodynamic equilibrium curves of binary hydrogen hydrates in presence of stabilizers (tetrahydrofuran, cyclopentane; Fig. 1); (ii) the kinetics of formation of hydrogen hydrates under water-in-oil or oil-in-water emulsion systems (Fig. 2); and (iii) Raman spectroscopy data showing the presence of hydrogen within the small hydrate cages (512 dodecahedra) and possibly also within the large cages (51262 polyhedra) of sII crystal structures (Fig. 3).
The final goal will be to develop a hydrogen storage medium with a gravimetric H2 content around 4 wt%, which is demonstrably competitive with current top technologies at a fraction of the technological level and economic cost.

Fig. 1: P/T curve for THF/CP/hydrogen hydrate formation under different pressures
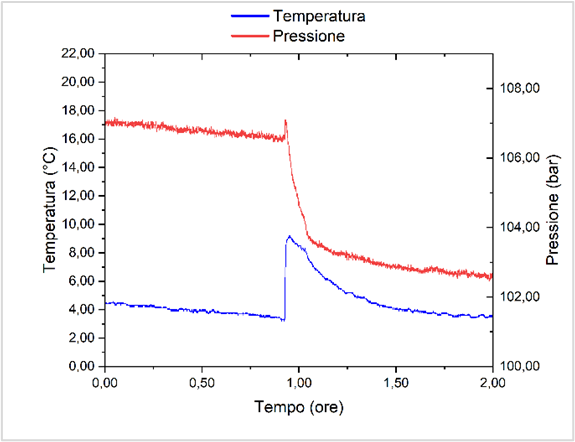
Figure 2: Kinetic P/T curves for the formation of THF/CP/H2 hydrate
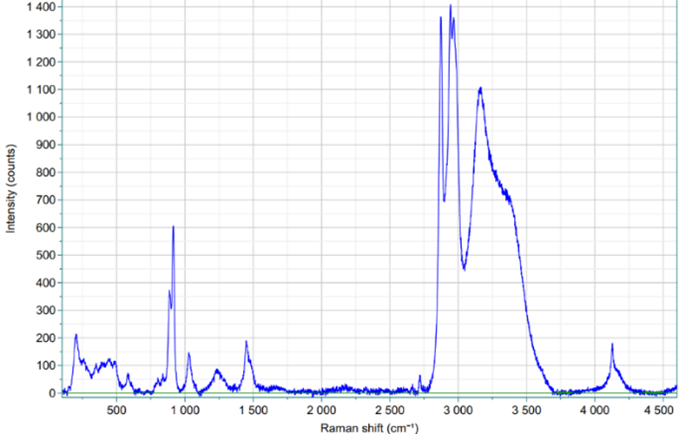
Figure 3: Raman spectrum of THF/CP/H2 hydrate at 70 bar
Bibliography
[1] Di Profio P, Arca S, Rossi F, Filipponi M. Int J Hydrogen Energy 2009;34:9173–80.
[2] Di Profio P, Arca S, Germani R, Savelli G. J Fuel Cell Sci Technol 2007;4:49–55.
[3] Di Profio P, Canale V, Germani R, Arca S, Fontana A. J Colloid Interface Sci 2018;516:224–31.
How to cite: Di Profio, P., Ciulla, M., Siani, G., Barbacane, N., Wolicki, R. D., Di Giacomo, S., Re, N., Marrone, A., Paciotti, R., Longo, S., Urso, R., Scire Scappuzzo, C., Palumbo, M. E., and Baratta, G.: Investigation of Hydrogen Clathrate Hydrates as Energy Storage Media for Planetary Installations, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1169, https://doi.org/10.5194/epsc2024-1169, 2024.
Asteroid exploration is a hot topic in current deep space exploration. Deploying a rover on the surface of an asteroid for reconnaissance is an important means to enhance the scientific return of exploration missions. Bouncing mobility, with its advantage of high maneuverability in weak gravity environments, is an effective surface mobility method. Bounce trajectory planning plays a key role in achieving effective bouncing mobility. This paper focuses on bounce trajectory planning for a rover on the irregular surface of an asteroid in the context of surface reconnaissance exploration. Firstly, based on the concept of dimensionality reduction, the three-dimensional complex shape of the asteroid is mapped to a two-dimensional height map using longitude and latitude. Then, a single-hop model is established for the rover's known starting and target points. Based on the two-dimensional map of the asteroid and the rover's single-hop model, the reachable range of a single hop is analyzed. An A* algorithm is combined to propose a single-hop-based bounce trajectory planning method. Next, to fully utilize the energy of the rover's initial jump and maximize its reachable distance in a single hop, a multi-hop model is established for the rover's known starting and target points. The reachable range of multiple hops is also analyzed, and a multi-hop-based bounce trajectory planning method is proposed. Finally, a comparative analysis is conducted between the single-hop-based and multi-hop-based trajectory planning methods. The impact of asteroid surface parameters on the rover's bouncing capability is evaluated to guide the deployment and design of asteroid exploration missions.
Acknowledgments
The authors acknowledge support from Young elite scientist sponsorship program by CAST (No. YESS20210296), the Beijing Institute of Technology Research Fund Program for Young Scholars (XSQD-202101012), Beijing Institute of Technology Research Fund Program for Innovative Talents (No. 2022CX01008).
How to cite: Pan, Q., Li, X., and Qiao, D.: Multi-Point Bounce Trajectory Planning on the Complex Surface of an Asteroid for Resource Exploitation, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1235, https://doi.org/10.5194/epsc2024-1235, 2024.
Future missions to comets such as the Comet Interceptor mission, developed by ESA and JAXA, require the prediction of the dust environment encountered by the spacecraft when approaching the comet. For this objective the dust production in terms of quantity, particle sizes, and velocity, has to be considered, since the dust hazard assessment is crucial for cometary fly-by missions. For supporting the Comet Interceptor project, ESA has fostered a research and technology activity in this direction. In this framework, available datasets related to the dust environment of comets, gathered during missions such as Giotto, and Rosetta, have been reviewed. The first objective of the data analysis is to select the most relevant datasets to be used for comparisons with computational predictions performed using COmMoDE (Cometary Model of Dust Environment), in order to validate the predictions and estimate the potential inconsistencies. The second is to perform a general assessment in order to define a set of trade-offs for the tool and model to be developed. In parallel, existing models for coma comet have been assessed and a model based on the fountain one has been derived.
Finally, this model has been integrated in a dedicated software ComMoDE (Cometary Model of Dust Environment). This tool is based on a time-efficient and highly flexible dust model to support the planning and operation of future cometary missions. ComMoDE is specifically designed to allow for a large range of different parameters. To account for the solar-radiation pressure, dependence of the dust outflow velocity and dust production rate on the emission angle and variation in the dust production rate in relation to the rotation of the nucleus, we use test particles for each emission angle and scale the dust number density accordingly. Since the acceleration region of the dust is not considered in the model, the trajectory of each test particle can be solved analytically. The architecture of the software is resumed in Figure 1: the model is incorporated in functions, embedded in an interface written in Python.
Figure 1: Software infrastructure scheme
The different possible trade-offs to be defined to input a fly-by trajectory are highlighted in Figure 2, showing a sketch of the ComMoDE interface. The software can output the dust number densities for a chosen number of particle size bins and in addition calculate the flux, fluence and total impact mass along a chosen fly-by trajectory. Once the trajectories post-processing produced valid results, the user can access the visualization environment, in which multiple trajectories can be processed.
To validate ComMoDE, it has been compared with DSMC predictions performed using DRAG3D. Since these lasts are computationally expensive, it is only possible to model the coma up to a few tens of the nucleus radius. ComMoDE results for the total impact mass were also compared to measurement data of Giotto at comet 1P/Halley. The best estimate of the impact mass on the Giotto spacecraft is 0.32 g. At comet 1P/Halley a knee in the power-law distribution was observed which could not be modelled with ComMoDE. The average cumulative power-law index of the mass distribution is 0.85 as described in the literature. When converting the cumulative power-law index of the mass distribution in the coma to a differential power-law index of the size distribution at the surface one gets 4.05. ComMoDE predicts a total impact mass of 1.06 g. Varying the power-law index, gives results from 0.08 g to 6.2 g. Hence, ComMoDE is able to reproduce the measurement data of Giotto to within one order of magnitude, which is a good agreement considering the large uncertainties of the problem.
Figure 2: Sketch of ComMoDE interface
Finally, there are no major differences between the DSMC and ComMoDE outside of the acceleration region (R > 10RN). Further, ComMoDE is able to reproduce the total impact mass measured by Giotto at comet 1P/Halley. Hence, it can be concluded that ComMoDE is able to provide accurate and reliable results for the total impact mass measured by Giotto at comet 1P/Halley.
How to cite: Reynier, P., Haslebacher, N., Thomas, N., Mokhtari, O., Marschall, R., Cipriani, F., Johansson, F., and Arpa, R.: ComMoDE: A software for assessing dust environment during comet fly-by, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1256, https://doi.org/10.5194/epsc2024-1256, 2024.
Please decide on your access
Please use the buttons below to download the supplementary material or to visit the external website where the presentation is linked. Regarding the external link, please note that Copernicus Meetings cannot accept any liability for the content and the website you will visit.
Forward to presentation link
You are going to open an external link to the presentation as indicated by the authors. Copernicus Meetings cannot accept any liability for the content and the website you will visit.
We are sorry, but presentations are only available for users who registered for the conference. Thank you.
Please decide on your access
Please use the buttons below to download the supplementary material or to visit the external website where the presentation is linked. Regarding the external link, please note that Copernicus Meetings cannot accept any liability for the content and the website you will visit.
Forward to session asset
You are going to open an external link to the asset as indicated by the session. Copernicus Meetings cannot accept any liability for the content and the website you will visit.
We are sorry, but presentations are only available for users who registered for the conference. Thank you.