
 1,1,1,3,3,4,4,5,
1,1,1,3,3,4,4,5,- 1ISAE-SUPAERO, DEOS, Toulouse, France (naomi.murdoch@isae.fr)
- 2University of Maryland, USA
- 3CNES, Toulouse
- 4Aix Marseille Université, CNRS, Laboratoire d’Astrophysique de Marseille (LAM), France
- 5Deutsches Zentrum für Luftund Raumfahrte.V. (DLR), Germany
- 6Department of Systems Innovation, University of Tokyo, Tokyo 113‑8656, Japan
- 7Université Côte d’Azur, Observatoire de la Côte d’Azur, CNRS, Laboratoire Lagrange, France.
- *A full list of authors appears at the end of the abstract
Introduction: The JAXA Martian Moons Exploration (MMX) mission [1] will deploy the French-German IDEFIX rover (Fig. 1) to the surface of Phobos [2]. The IDEFIX rover will attempt wheeled-locomotion on a low-gravity surface for the first time thus providing a unique opportunity to study the surface properties of Phobos and the behaviour of regolith on small-bodies.


Figure 1 (left) The MMX IDEFIX rover (image credit: JAXA). (right) A WheelCam (image credit: CNES)
The WheelCams: The IDEFIX rover includes two WheelCams, placed on the underside of the rover and each aimed at a different rover wheel [3]. The WheelCam image sensors are panchromatic and consist of a 2048 by 2048 array. The optics provide a field of view of 32.5° and a pixel resolution of approximately 100 μm at the centre of the image. The WheelCams are also equipped with LEDs to illuminate the scene; white LEDs to be used while driving, and three colour LEDs (590, 720 and 880 nm) to allow for multispectral imaging. The WheelCams can be operated in both an imaging and a movie mode. Typical movie frame rates are expected to be 1 image per mm moved for the front WheelCam, 1 image per cm moved for the rear WheelCam (the anticipated rover speed is ~0.1-4 mm/s).
Science Objectives of the WheelCams: The WheelCam images will be used to characterize the general grain properties of the regolith (size distribution, morphological parameters [3]), within the limits of the resolution. The WheelCam images will also be used to determine the adhesive properties of regolith particles stuck to the rover wheels and the depth of the wheel sinkage, which is closely linked to the load bearing strength [4] and friction angle of the regolith [5]. The linear and angular velocities of the wheel will be calculated from the WheelCam images in order to provide measurements of the traction and slippage of the wheel. In addition to providing important information about the performance of the locomotion, this also provides the shearing characteristics of the regolith [6,7]. Topographical reconstruction of the rover tracks, talus and tailings behind the wheels [8] will provide additional constraints on the physical properties of the regolith. Finally, using the coloured LEDs it will be possible to study the mineralogical composition of the regolith from reflectance and albedo measurements, and to asses space weathering by comparing inside and outside of the rover tracks.
Preparing for the WheelCam analyses: In anticipation of the MMX mission, we have developed the MMX WheelCam testbed (Fig. 2, [9]) that recreates the scene that the WheelCams will observe during the mission (Fig. 3). The main objective of the testbed is to develop the image processing tools for the WheelCams. The testbed is instrumented with multiple sensors allowing measurements to be made of the sinkage of the wheel into the soil, and the slippage (essentially the loss of traction) of the wheel. The testbed also includes the MMX rover wheel, camera baffles, the LEDs and blackout panels to perform trials in representative lighting conditions.
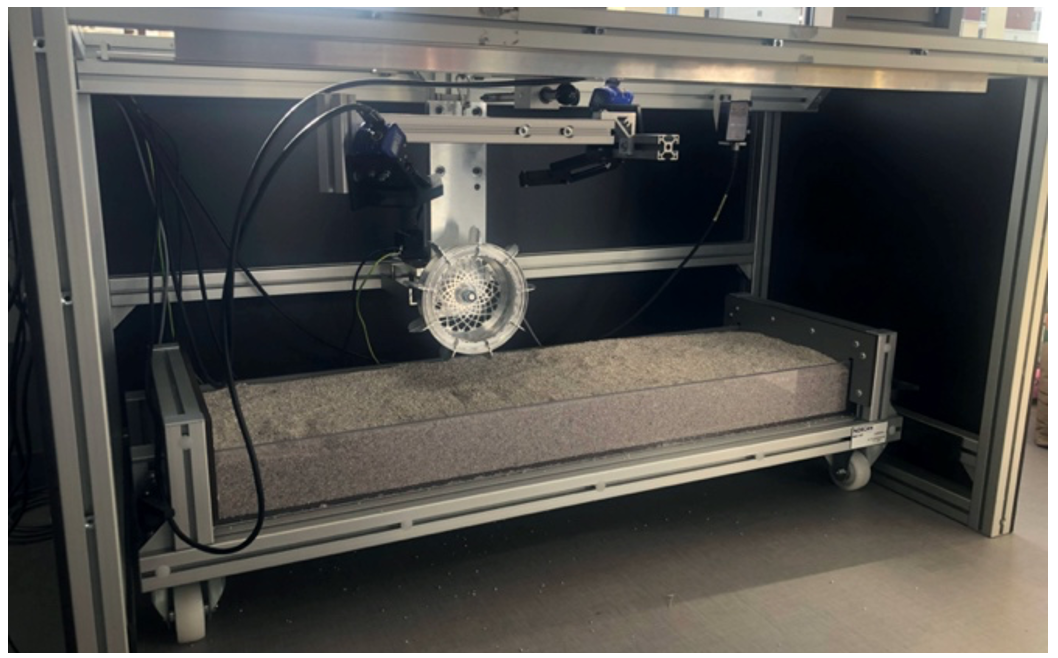
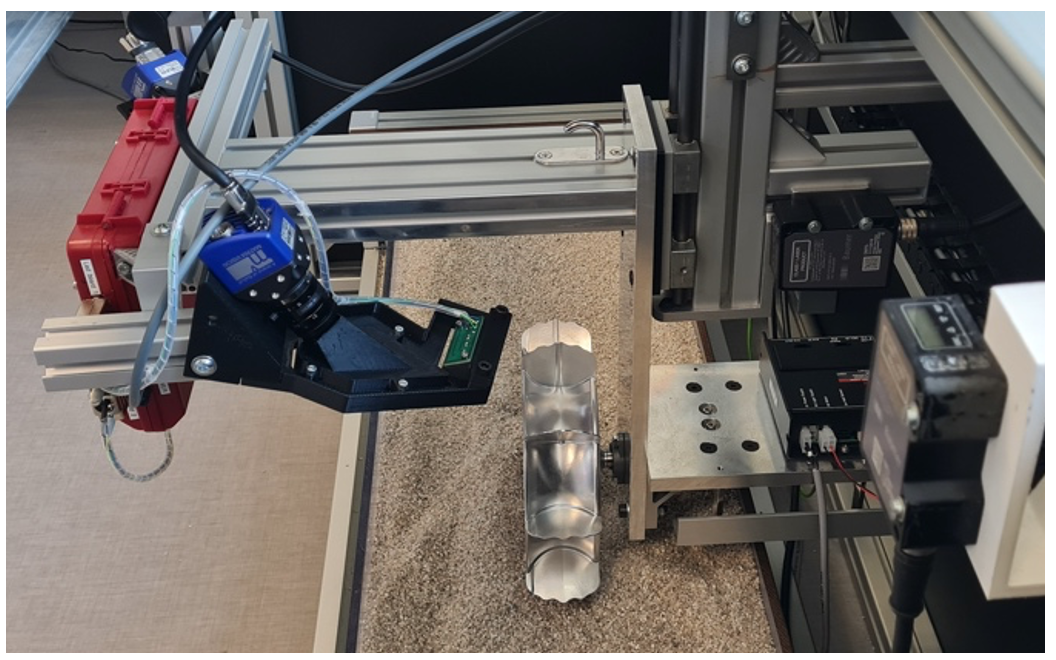
Figure 2. Two different views of the MMX WheelCam testbed at ISAE-SUPAERO.


Figure 3. WheelCam approximate field of views, as generated by the WheelCam testbed. (left) Front WheelCam perspective. (right) Rear WheelCam perspective.
We also perform Discrete Element Method simulations [10] in order to understand the influence of the low gravity environment on sinking and driving behaviour (Fig. 4; [11, 12]]. This is essential to ensure an accurate determination of the regolith properties from the wheel – surface interactions.
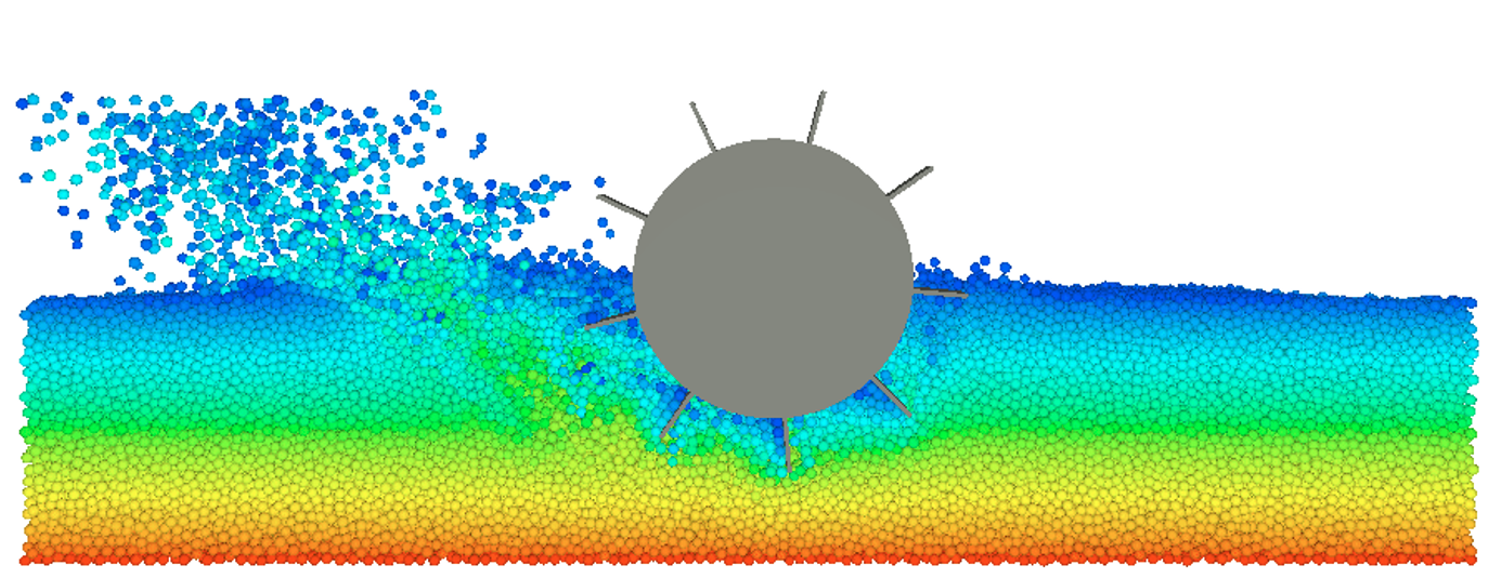
Figure 4. Snapshot from a rolling simulation where gravity is 0.006 m/s2 and the rotational velocity is 0.65 rad/s [11,12].
Conclusions: This presentation will discuss the expected science return from the MMX IDEFIX rover WheelCams and provide a status of the preparatory activities and image processing pipelines under development.
Acknowledgments: We acknowledge CNES funding.
References: [1] Kuramoto, K. et al. EPS (2022), [2] Michel et al., EPS (2022), [3] Robin, C. et al., Nat. Comm. 2024, [4] Bigot, Lombardo et al. [5] Sullivan et al., JGR-Planets (2011), [6] Maimone, M. et al. J. Field Robotics (2007), [7] Reina, G. et al. IEEE/ASME Trans. On Mechatronics (2006), [8] Amsili, A. et al. EPSC 2024, [9] Passoni, L. et al., LPSC (2021), [10] Sunday, C. et al., MNRAS (2020), [11] Sunday, C., et al. EPSC (2022), [12] Sunday, C. PhD Thesis, ISAE-SUPAERO (2022).
Fabien Buse, Stefan Barthelmes
How to cite: Murdoch, N., Sunday, C., Amsili, A., Tardivel, S., Robin, C., Vivet, D., Delton, P., Smith, J., Tur-Garcia, T., LaLucaa, V., Theret, N., Bertrand, J., Baroukh, J., Vernazza, P., Groussin, O., Jorda, L., Biele, J., Miyamoto, H., Ulamec, S., and Michel, P. and the MMX Rover Locomotion Team: The science goals of the IDEFIX rover WheelCams, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1185, https://doi.org/10.5194/epsc2024-1185, 2024.