
Subsurface Investigations of Debris-Covered Glaciers as Mars Analogs with Drone-Based Ground Penetrating Radar
- 1University of Arizona
- 2University of Alaska, Fairbanks
Ground penetrating radar (GPR) is a valuable geophysical technology for imaging the interior of debris-covered glaciers (DCGs) on Mars and Earth. The Shallow Radar (SHARAD, 15-25 MHz) sounder onboard NASA’s Mars Reconnaissance Orbiter confirmed the bulk composition of the DCGs at the mid-latitudes of Mars is water ice [1]. However, internal structure and debris layer thickness, which are of interest for paleoclimate studies and in-situ resource exploration, respectively, are not obtainable with this instrument and would be challenging for any orbital platform [2, 3].
On Earth, GPR has been employed over terrestrial analogs to understand the basic relationships between the composition, structure, flow kinematics, and morphology of similar landforms [4, 5]. This geophysical method penetrates through the debris layer on the surface, allowing for the quantification of the debris thickness, total glacier thickness, ice purity, and the presence of englacial bands. Traditional surface-based GPR has a high signal-to-noise ratio (SNR), but involves slow, manual operations with bulky equipment that renders it less suitable than robotic platforms for future Mars exploration missions.
To address this challenge, we tested a drone-based GPR at two DCGs, Sourdough, Alaska, and Galena Creek, Wyoming. The platform consists of a MALA Geodrone 80 GPR system mounted on a DJI Matrice 600 Pro (Figure 1). To maintain a constant speed and altitude over an uneven surface, we use a UgCS SkyHub terrain-following system consisting of an altimeter and a distance sensor for obstacle avoidance. The GPR antennas should be as close to the ground as possible to maximize the SNR, so we conducted surveys starting at 1.5 m above the ground. However, due to the roughness of the terrain, steep slopes, and the presence of large boulders, most of the surveys have been performed at altitudes between 2 and 3 m to reduce the risk of collision, at a flight speed between 0.5 m/s and 1 m/s.
Our findings suggest that the drone-based GPR can resolve the debris/ice with acceptable SNR and thus accurately measure the debris thickness. Also, it is possible to detect the bedrock in sections where the glacier is thinner. Additionally, drone-based GPR also resolved these reflectors at the cirque of Galena Creek, where surface-coupled GPR had identified englacial debris bands.
In conclusion, our system is a promising method for surveying rock glaciers on Earth. As for planetary exploration, the study of robotics-based radar platforms aligns with the interests of developing uncrewed missions to Mars. For instance, the Mars 2020 mission includes a GPR as part of the instruments onboard the Perseverance rover, and Ingenuity, a successful demonstration of autonomous powered flight on Mars.
References
[1] Holt, J. W. et al., Science, vol. 322.
[2] Baker D. M. H.and Carter L. M. (2019) Icarus, vol. 319.
[3] Aguilar, R. et al. (2024) LPSC LV, Abstract #2479.
[4] Petersen, E. I. et al. (2018) Geophys. Res. Lett., vol. 45.
[5] Meng T. M. et al. (2023) Remote Sensing, vol. 15.

Figure 1. DGPR operations at Galena Creek Rock Glacier, Wyoming. The GPR MALA Geodrone 80 (white box) is mounted on the DJI M600 Pro drone. The length of the antennas is 1.04 m, with a separation of 0.53 m.
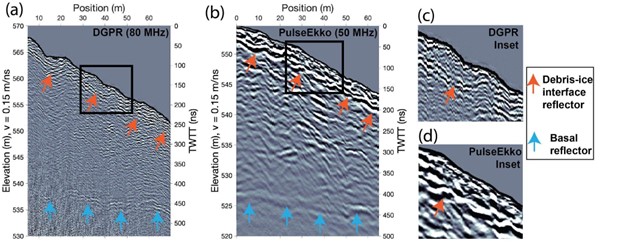
Figure 2: Radargrams acquired at lower Sourdough Rock Glacier. (a) Drone GPR at 80 MHz, ground tracks represented with the yellow line in Figure 1a. (b) Surface-based PulseEkko GPR at 50 MHz, ground tracks represented with the red line in Figure 1a. (c) and (d) are insets of the debris-ice interface from Figure 2a and Figure 2b, respectively.
How to cite: Aguilar, R., Meng, T., Christoffersen, M., Nerozzi, S., and Holt, J.: Subsurface Investigations of Debris-Covered Glaciers as Mars Analogs with Drone-Based Ground Penetrating Radar, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-1271, https://doi.org/10.5194/epsc2024-1271, 2024.