
 ,,
,,- Université de Toulouse, ISAE Supaero, DEOS, France (alice.amsili@isae-supaero.fr)
The Japanese Mars Moon eXploration (MMX) mission will explore the two Moons of Mars: Phobos and Deimos [1]. The Japanese probe will first orbit Phobos before landing in order to conduct a sample collection before proceeding to orbit Deimos and then return to Earth. The Centre National d’Etudes Spatiales (CNES) and the Deutsches zentrum für Luft- und Raumfarht (DLR) have jointly developed a small rover called IDEFIX (Fig 1) that will leave the Earth in 2026 with the Japanese MMX mission. It will be deployed onto the surface of Phobos to conduct preliminary ground analyses, ensuring a safer landing for the main MMX spacecraft [2]. The IDEFIX rover has two cameras near the wheels called WheelCams [3], which are directed at the ground. Thanks to these, IDEFIX will be able to capture close-up images of the ground, providing information regarding the size, distribution and morphology of regolith particles [4]. By studying the interactions between the regolith and the rover wheels, other important information can be obtained such as the frictional and cohesive properties of the ground.

Figure 1: The IDEFIX rover. The positions of the two WheelCams are indicated (image: CNES)
The work presented here focuses on using the WheelCam images to measure the local topography of the ground underneath the rover, specifically the shape of the trench left by the rover’s wheels after rolling. The images are generated using the MMX rover-wheel test bed at ISAE-SUPAERO that is instrumented with cameras similar to the MMX rover WheelCams [5]. An algorithm based on a Structure from Motion (SFM) method was developed to reconstruct the shape of the trench. Due to the non-overlapping field of views of the two WheelCams [3], only one camera is used. Consecutives images captured by one single camera while the rover is in motion enable the creation of a 3D model including the ground, the objects passing nearby the rover and the trench left by the wheel.
Below (Fig.2), an example of a 3D model generated by the SFM algorithm is presented. In this example, the wheel is driving on sand and the bumps left by the wheels are clearly visible both in the images and in the reconstruction. The reference point is set to be the position of the first camera.
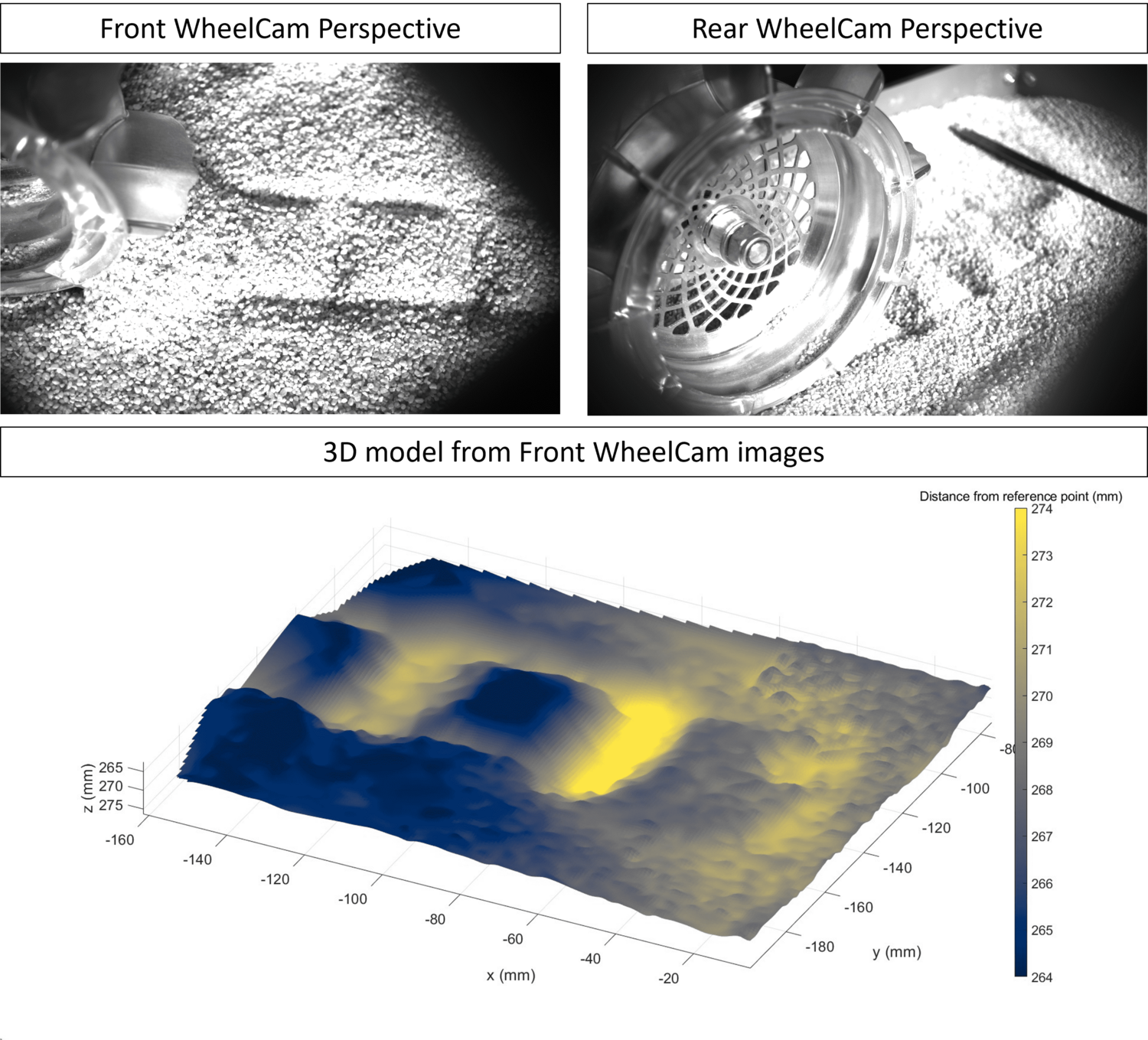
Figure 2: 3D model of the trench left by the wheel rolling on sand
In order to validate the SFM algorithm and the 3D model obtained, objects with a known shape and size have also been placed in the field of view and modeled by the algorithm. These tests also allow us to evaluate the performance of the SFM algorithm under different conditions (varying wheel velocities, lighting conditions, regolith types....). In addition to verifying the correct retrieval of the objects’ size and shape, a second method of validation was also applied. The SFM method gives an estimation of the position of the camera at each frame, which can be seen in red in the point cloud Figure 3. The ISAE-SUPAERO rover-wheel testbed has laser distance sensors that give the precise position of the camera when each picture is taken. Thus, the laser measurements can be used as ground truth data and compared to the estimated position of the camera from the model. This comparison is shown in Figure 4.
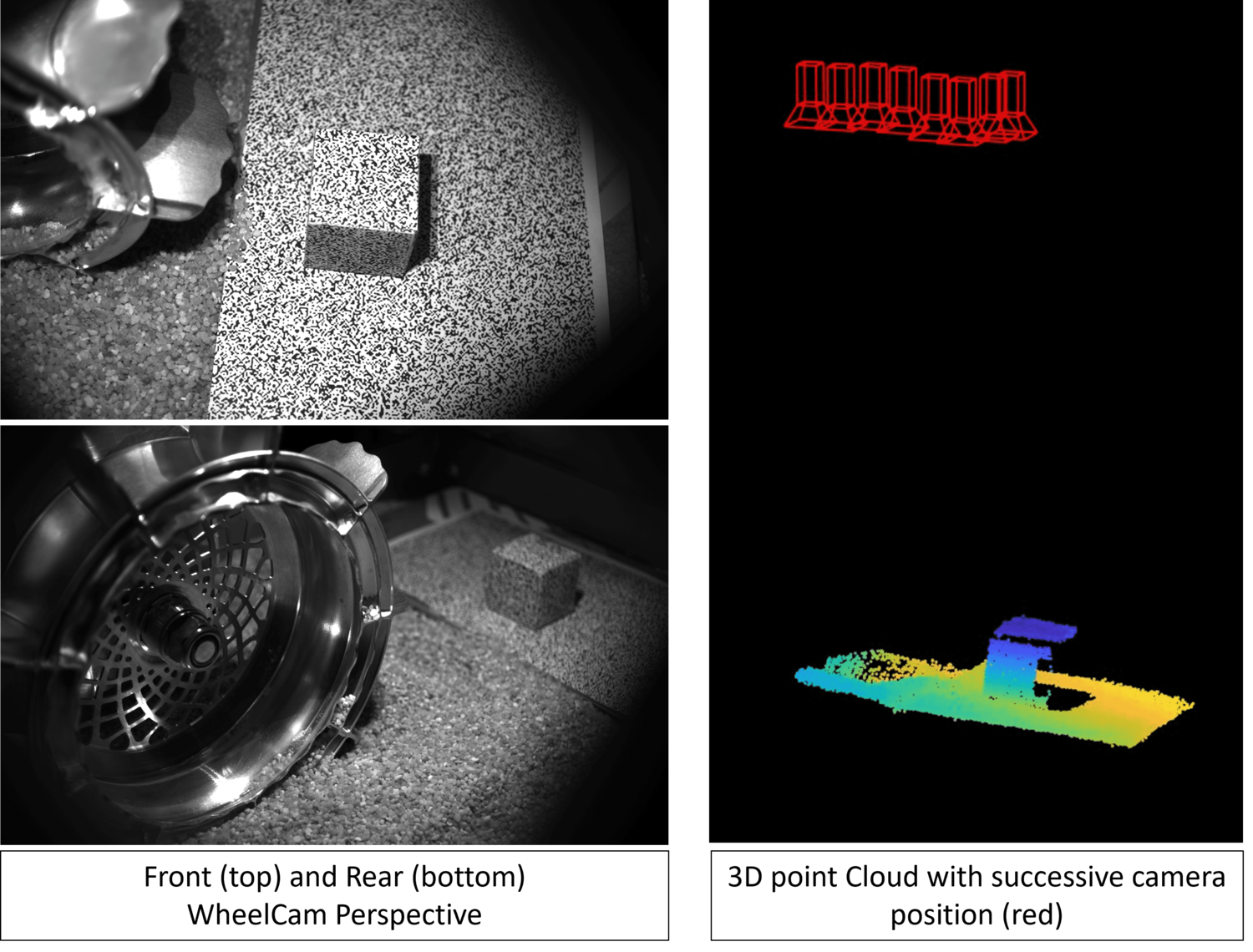
Figure 3: (left) WheelCams Perspectives. An object with a known size and shape is covered by a speckle and placed on a flat speckled surface. (right) 3D point cloud of the scene with the successive camera positions (red)
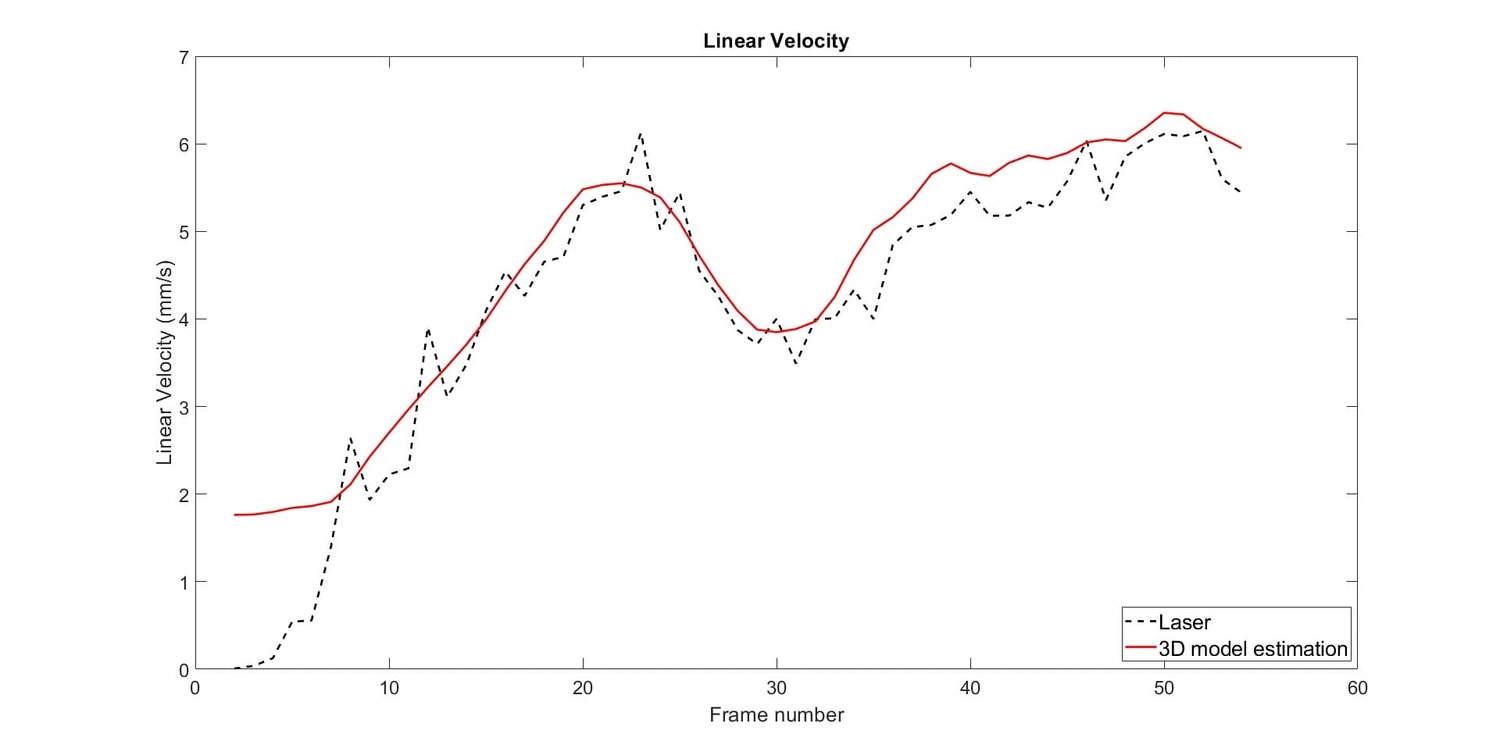
Figure 4: Comparison of the linear velocity estimated from the SFM algorithm (red) to the laser distance sensor ground truth measurement (black dashed)
This work demonstrates that it is possible to reconstruct the shape of the ground, and more specifically the morphology of the trench left by the wheel, using the IDEFIX WheelCam images. This will allow us to make measurements of the track depth, and thus the rover sinkage in addition to providing measurements of the angle of repose if the trench walls collapse. Moreover, an estimation of the consecutive camera positions can be obtained, which enables the linear velocity of the rover to be computed. This information will be valuable to help estimate the slippage of the wheels on Phobos and thus assess the performance of the rover’s locomotion.
Acknowledgements
This work has received funding from CNES, in the context of the MMX rover mission.
References
[1] Kuramoto, K., Kawakatsu, Y., Fujimoto, M., Araya, A., Barucci, M. A., Genda, H., ... & Yokota, S. (2022). Martian moons exploration MMX: sample return mission to Phobos elucidating formation processes of habitable planets. Earth, Planets and Space, 74(1), 12.
[2] MICHEL, Patrick, ULAMEC, Stephan, BÖTTGER, Ute, et al. The MMX rover: performing in situ surface investigations on Phobos. earth, planets and space, 2022, vol. 74, p. 1-14.
[3] Murdoch et al. The science goals of the IDEFIX rover WheelCams, EPSC 2024
[4] Robin C. Q., Duchêne A., Murdoch N., et al. Mechanical properties of rubble pile asteroids: insights from a morphological analysis of surface boulders. Nature Communications, accepted (2024)
[5] Passoni, L., et al. "A Single-Wheel Testbed for Regolith Science Studies." Lunar and Planetary Science Conference. No. 2548. 2021.
How to cite: Amsili, A., Murdoch, N., and Vivet, D.: 3D reconstruction of MMX rover tracks using WheelCam images, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-407, https://doi.org/10.5194/epsc2024-407, 2024.