EPSC Abstracts
Vol. 17, EPSC2024-61, 2024, updated on 03 Jul 2024
https://doi.org/10.5194/epsc2024-61
Europlanet Science Congress 2024
© Author(s) 2024. This work is distributed under the Creative Commons Attribution 4.0 License.

Enabling large-scale detection of subsurface features on Mars by their radar mapping
 1,
1,- 1Digital Society Center, Fondazione Bruno Kessler, Trento, Italy
- 2Department of Information Engineering and Computer Science, University of Trento, Trento, Italy
The surface of Mars has been widely studied, but the subsurface remains widely unknown at a global scale. One reason is the widely spread layer of dust covering several geological features. Unveiling those would help to understand better the planet's geological history. The main source of information on the Martian subsurface is provided by radar sounder (RS) data. RS are spaceborne nadir-pointing remote sensors that analyze the subsurface by transmitting signals in high or very high-frequency bands. The signals can propagate into the subsurface up to several hundred meters deep. The subsurface structure can be inferred by analyzing the recorded RS echoes in radargrams. For mechanical reasons, the RS antenna is typically a dipole with a large footprint. The large footprint may generate unwanted off-nadir reflections (clutter) that mask the nadir-originating subsurface information. The Mars Advanced Radar for Subsurface and Ionosphere Sounding (MARSIS) is a RS mounted onboard the Mars Express mission. It acquires data simultaneously at two bands with central frequencies 1.8, 3, 4, and 5 MHz. Various analyses of Martian radar-sounding data have identified subsurface features that were impossible to detect with any other current remote sensor deployed on Mars. Watters et al. [1] detected buried basins in the Martian northern lowlands. The analysis in [2] identified several subsurface interfaces on the Medusae Fossae Formation (MFF) that could correspond to ice-rich formations. However, large-scale global detection of features located on the subsurface remains challenging since i) radar sounder data analyses are conducted mainly by visual interpretation and do not cover very large extensions, and ii) radar-imaging techniques using RS data are limited to surface and shallow subsurface analysis [3, 4].
Here, we extend [4] to generate Mars radar maps of the deep subsurface features at a specific depth by projecting the subsurface information of RS data onto a surface digital elevation model (DEM). The subsurface radar maps can potentially contain information (e.g., location, extension) on subsurface features at a large scale and significantly enhance a broader detection of previously unknown buried targets. The method leverages the multifrequency nature of MARSIS data to mitigate surface clutter that could lead to surface-reflection-false positives on the subsurface map by designing an automatic implementation of the multifrequency analysis described in [5]. The automatic clutter reduction algorithm co-registers the two bands of MARSIS acquisitions (i.e., range lines) by maximizing the correlation to account for range offsets caused by the ionospheric delay at different MARSIS frequencies. Once co-registered, the clutter reduction algorithm differentiates between surface clutter and subsurface reflections. For each range line, the method takes the subsurface point at the desired depth as a reference nadir point. The subsurface depth is calculated according to the propagation medium's expected dielectric constant (ε') and the time delay. The RS values below the reference subsurface nadir point are projected onto a surface DEM: the radar ranges to these subsurface values are inverted to be projected onto the surface DEM points at the same ranges as the subsurface ranges. The projected DEM size is coherent with the expected RS antenna footprint size. The process is conducted for every range line from the same and different orbits. The overlapping projections are averaged to generate the subsurface radar map.
We generated 4MHz subsurface radar maps of Mars by applying the method to MARSIS data from the Subsurface Sounding Reduced Data Record combined with the Mars Orbiter Laser Altimeter (MOLA) DEM. To validate the approach, we produced a subsurface map at a depth of 300m where subsurface features are expected according to [2]. We assume an overlying layer of dust with ε'≈3 to locate the reference subsurface nadir points. To mitigate the impact of surface clutter, we focused on the northern hemisphere. Even if affected by some artifacts, the generated subsurface maps revealed several subsurface features in the MFF and its surroundings consistent with previous findings [1, 2]. Fig. 1 (a) illustrates the subsurface map at 300m depth of eastern MFF, highlighting subsurface features (SF1 and SF2) and their possible extension. Location and depth align with the findings in [2]. Fig. 1 (b-c) presents two radargrams showcasing SF1 and SF2. Fig. 2 (a) displays the subsurface map at 300m depth of MFF north surroundings, revealing a subsurface feature SF3 that could correspond to a buried basin identified in [1]. SF4 represents an unknown subsurface feature. Fig. 2 (b-e) shows radargrams acquired on SF4 displaying this subsurface feature. To discard the possibility of SF4 being surface clutter, we performed statistical analyses and studied the corresponding cluttergrams [6] (i.e., RS simulations), which indicated that these reflections may correspond to subsurface reflections. These results demonstrate the effectiveness of our method in identifying previously noted genuine subsurface features and new potential subsurface features for further investigation.
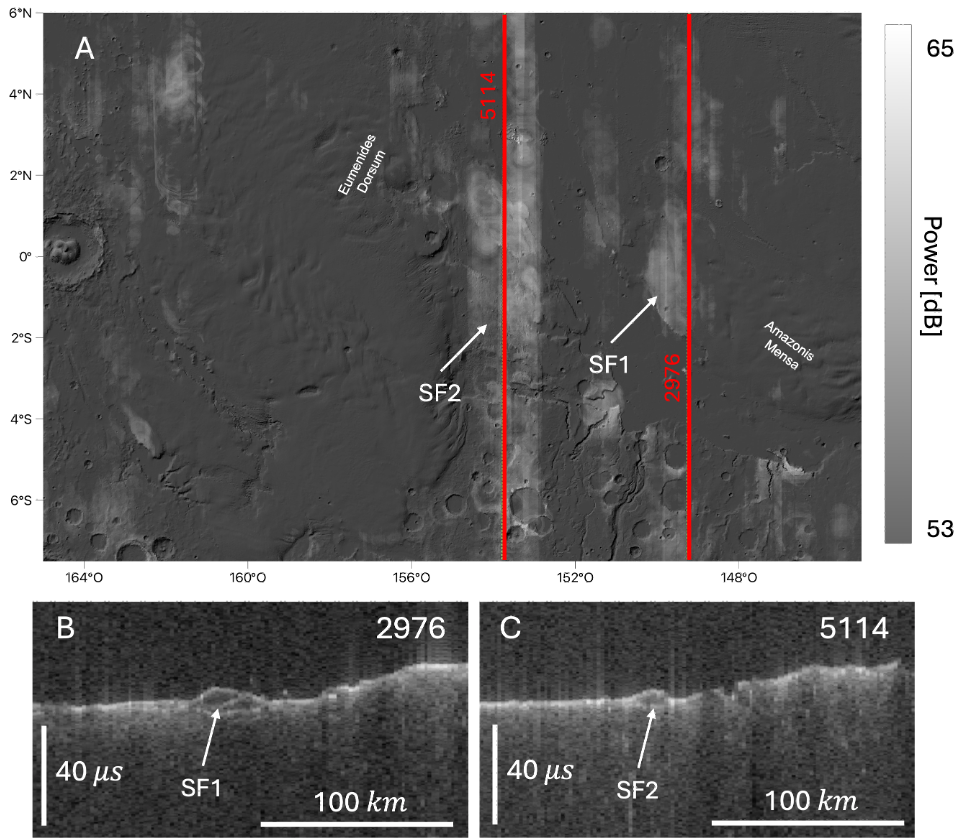
Figure 1. (a) Eastern MFF subsurface radar map at 300m depth over MOLA shaded relief. Red lines indicate the orbit track of MARSIS radargrams in (b) and (c). SF1 and SF2 are noted in (b) and (c) with white arrows.
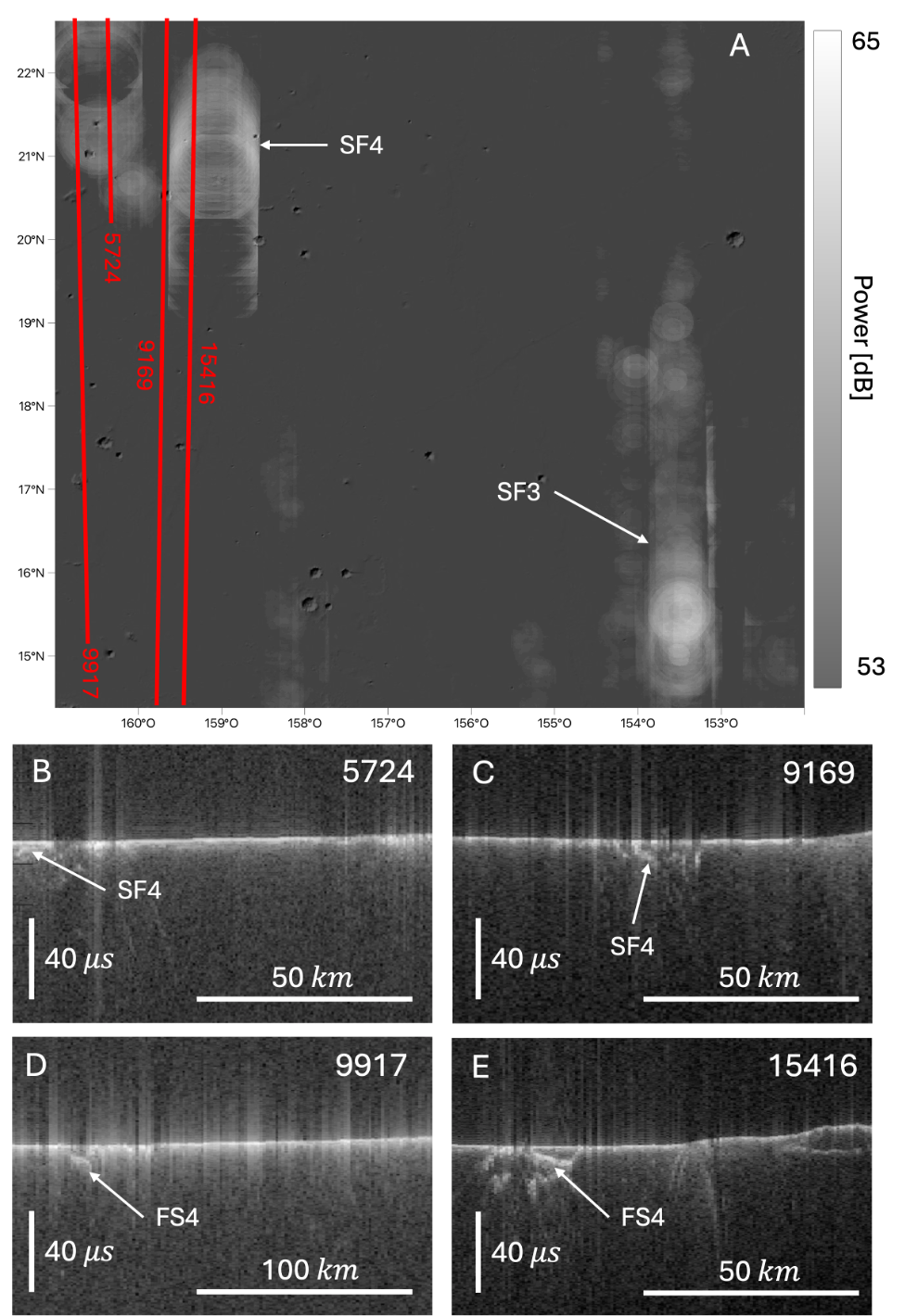
Figure 2. (a) MFF north surroundings subsurface radar map at 300m depth over MOLA shaded relief. Red lines indicate the orbit track of MARSIS radargrams in (b), (c), (d), and (e). SF4 is shown in (b), (c), (d), and (e) with white arrows.
REFERENCES
[1] Watters et al. MARSIS radar sounder evidence of buried basins in the northern lowlands of Mars. Nature, 444(7121):905–908, 2006.
[2] Watters et al. Evidence of ice-rich layered deposits in the Medusae Fossae Formation of Mars. Geophysical Research Letters, 51(2):e2023GL105490, 2024.
[3] Carrer et al. Mars surface imaging by exploiting off-nadir radar sounding data. IEEE TGRS, 59(4):2951–2961, 2020.
[4] Hoyo García et al. Generation of global surface and shallow subsurface images of Mars by radar sounders data. Technical report, Copernicus Meetings, 2021.
[5] Carrer et al. Solving for ambiguities in radar geophysical exploration of planetary bodies by mimicking bats echolocation. Nature Communications, 8(1):2248, 2017.
[6] McMichael et al. Radar autofocus algorithm incorporating terrain knowledge for correction of Mars' ionospheric distortion in MARSIS observations. In 2017 IEEE RadarConf, pages 0873–0878. IEEE, 2017.
How to cite: Hoyo García, M., Bruzzone, L., and Bovolo, F.: Enabling large-scale detection of subsurface features on Mars by their radar mapping, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-61, https://doi.org/10.5194/epsc2024-61, 2024.