
 1,1,1,1,1,1,5,
1,1,1,1,1,1,5,- 1INAF-IAPS, Rome, Italy (lorenzo.rossi@inaf.it)
- 2Leonardo, Nerviano, Italy
- 3ALTEC, Turin, Italy
- 4Thales Alenia Space Italia, Turin, Italy
- 5ESA-ESTEC, Noordwijk, the Netherlands
Rosalind Franklin will be the first Mars rover capable of drilling into the surface of Mars down to a depth of 2 m. Its drill system is designed to collect small core samples at depth and deliver them to the analytical instruments inside the rover body. This capability is instrumental in the search for traces of past life, as chemical biosignatures are better preserved and more likely to be detectable below the surface [1]. It also enables the investigation of the mineralogy and stratigraphy of the shallow subsurface environment of Mars, providing a more complete understanding of the geology of the landing site, Oxia Planum.
During its operation, the drill system records a broad collection of telemetry data, including temperature, force, torque, and speed readings. Once downlinked to ground, telemetry data enables the assessment of the drilling operation progress and system health status. But drill telemetry can also offer valuable information about the mechanical properties of the rocks the drill bores through, thus providing additional clues about the geology of drilling site. When used in synergy with the information provided by the rover’s science instruments, it can improve the overall characterization of the subsurface environment where core samples are collected and inform their analysis [2].
To this end, we are developing data analysis techniques and custom data processing and visualization tools to extract scientifically relevant information from drill telemetry data.
One of the main goals is to extract information about the stratigraphy of the drilling site. Differences in the mechanical properties of stratigraphy layers are linked to variation in the composition and cohesion state. The detection of such variations can provide information to improve the understanding of the geologic history of the site.
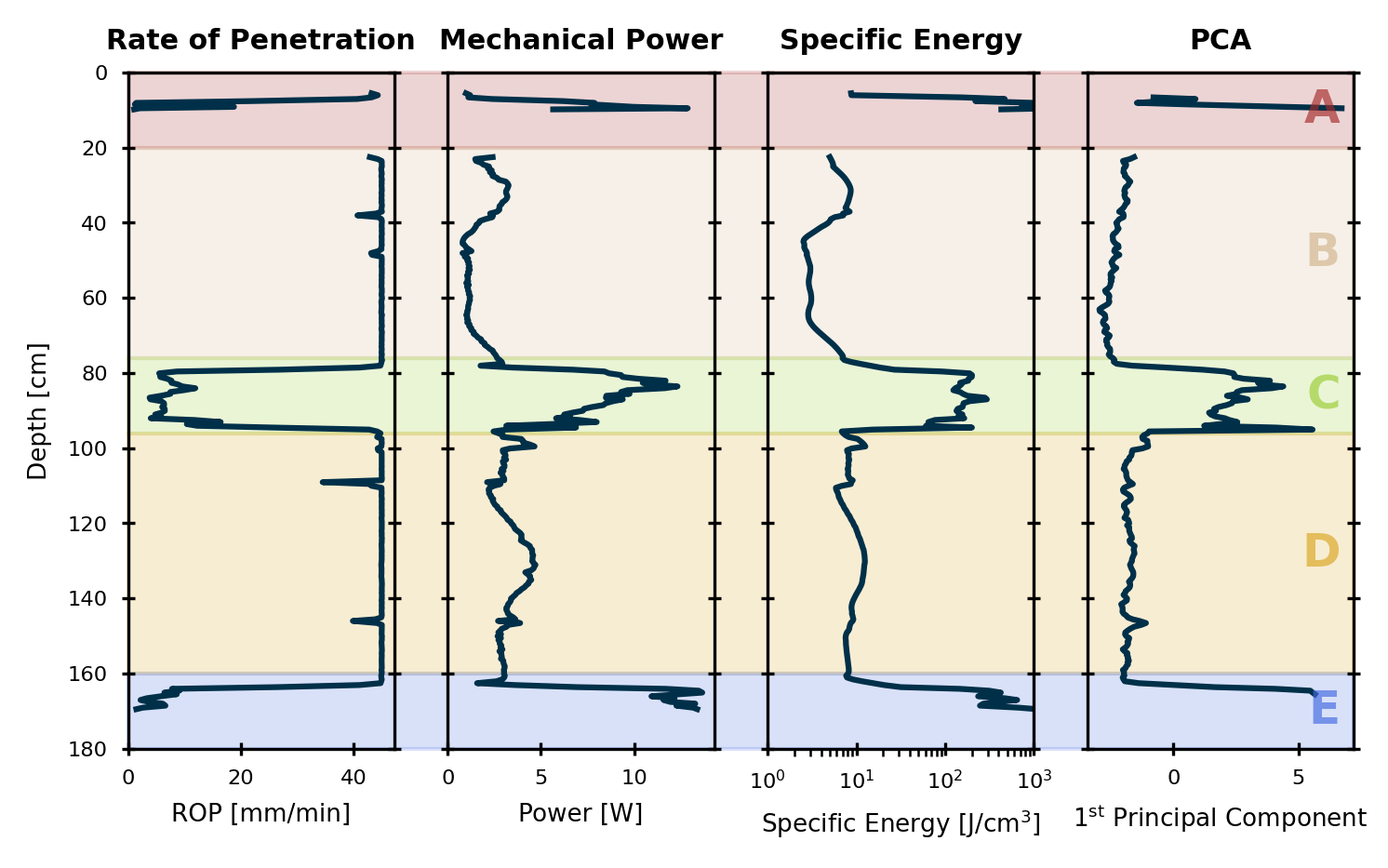
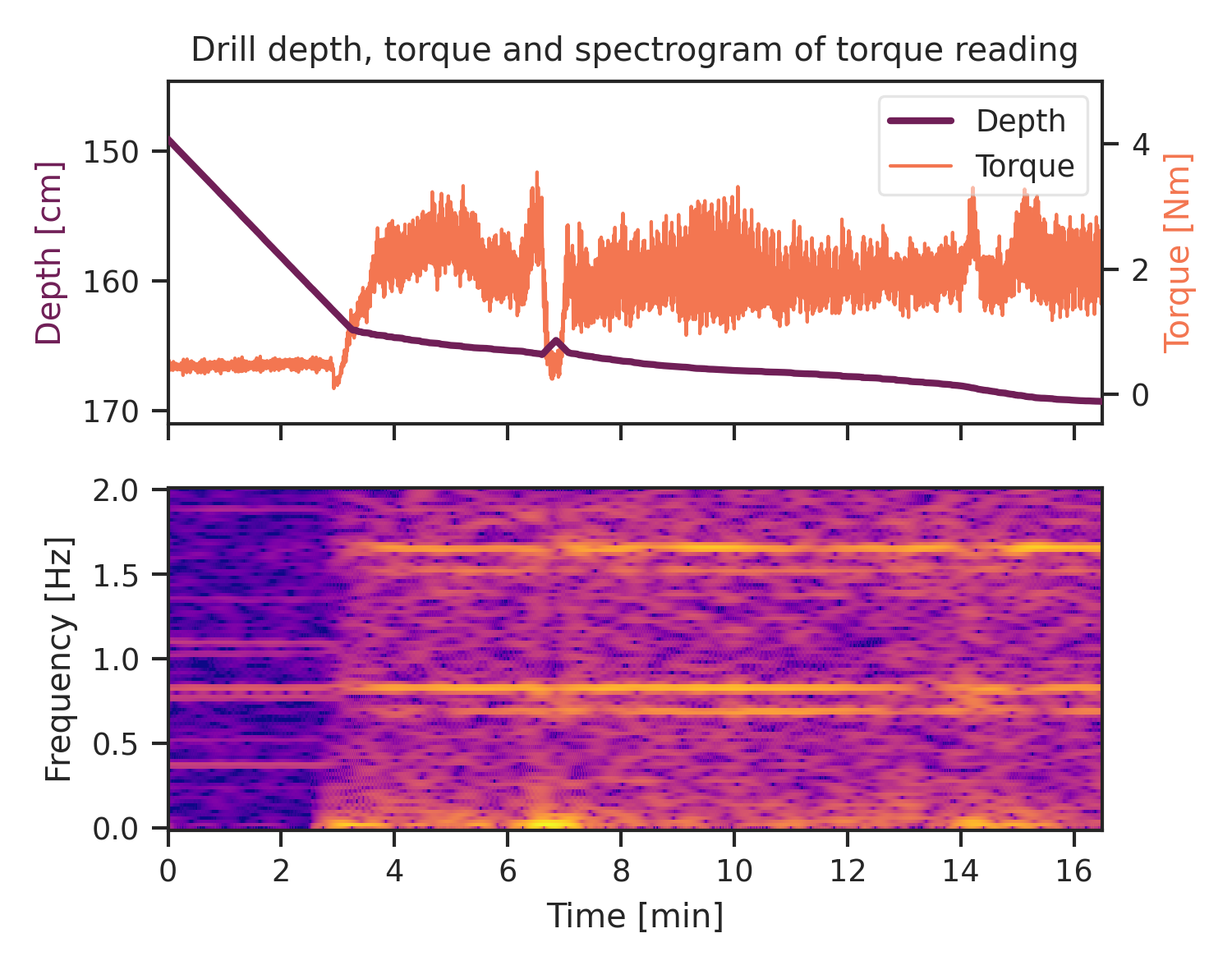
An example of some informative parameters that can be derived from drill telemetry data is shown in Figure 1. Here various quantities are shown against depth, thus highlighting the variability of the mechanical behaviour of different stratigraphy layers. The telemetry dataset shown here comes from a Ground Test Model (GTM) drilling test carried out in February 2023. In this case adjacent stratigraphy layers had very different mechanical properties, making the detection of the interfaces between them rather easy. However, some more advanced techniques will be needed to detect subtler differences. Another example of the variation seen in drill telemetry data corresponding to the interface between two different materials is shown in Figure 2. Here we see the drill moving from a loose material to one that is harder to drill. In addition to the decrease of the vertical speed and increase of drill torque, also the power density spectrum of the torque sensor reading varies. This hints to the information content of the time evolution of the telemetry data. Indeed, most of the best-performing analysis methods we tested so far also use some information about the time evolution of the telemetry data, rather than only using values from a single timestep.
|
Figure 1 - Quantities derived from drill telemetry data from February 2023 GTM drilling tests. |
|
Figure 2 – Variation of the measured drill torque at the interface between two layers with. |
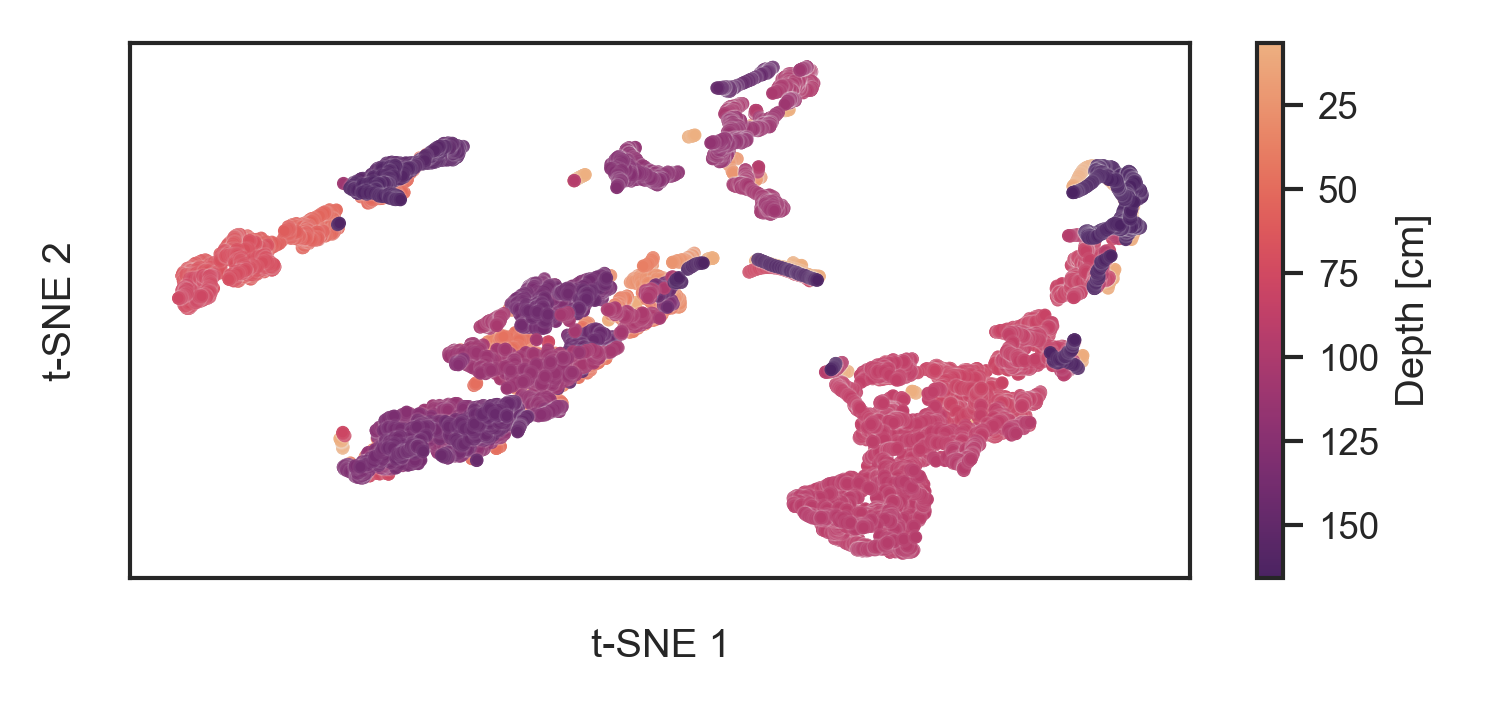
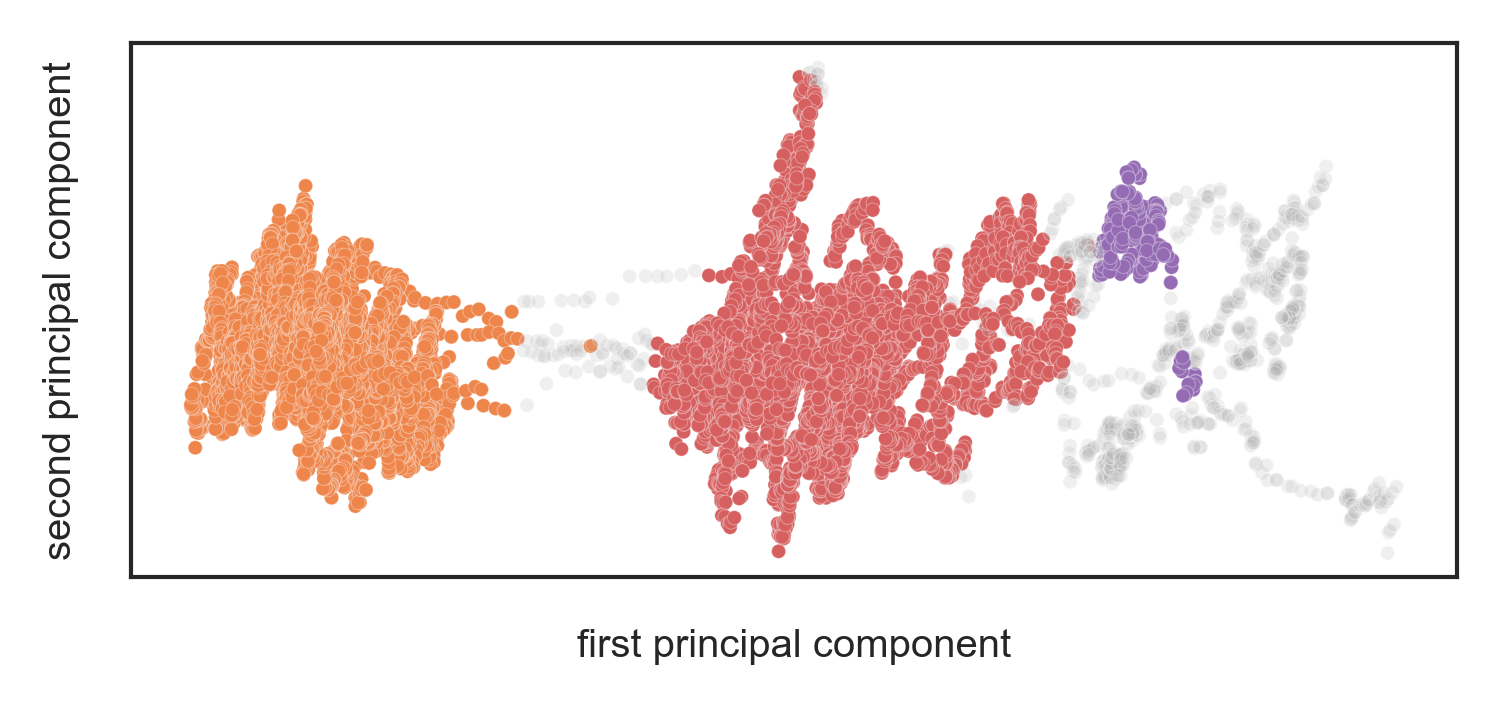
To assess the information content of the various drilling parameters, we employed several dimensionality reduction and clustering algorithms. These methods are also useful to provide a preliminary assessment of drill telemetry with some “blind” indications about the presence of layers with different properties, without requiring a-priori information. Figure 3 shows a representation of a telemetry dataset in a 2-dimensional embedding space obtained with the t-SNE (t-distributed stochastic neighbour embedding) algorithm. This representation shows similar data points closer together. Here each point represents a 20 second interval of telemetry data and is coloured as a function of depth. However, depth was not included among the features the embedding was computed from, and the fact that lumps of points result to be close together also in depth gives a first indication of the presence of layers with different properties. Similar conclusions can be drawn from the results of clustering algorithms such as HDBSCAN, shown in Figure 4. These results indicate that substantial information about the properties of the material is indeed contained in drill telemetry data.
|
Figure 3 - t-SNE visualization of a drill telemetry dataset. |
Figure 4 - HDBSCAN clustering results. |
In addition to the unsupervised learning methods mentioned so far, we also developed some supervised classification models based on 1D convolutional neural networks. After training and hyperparameter tuning, such models achieved a very high accuracy in recognizing different materials, but their general applicability is still limited as they were trained on a limited dataset, with very few reference materials.
We are now working towards generating a larger reference dataset to improve our analysis methods, combining data from both GTM drilling tests and the qualification tests of the drill performed in Mars-like conditions. New GTM drilling tests will be carried out in the future, providing additional data and the opportunity of further enhancements. We are also trying to better define some quantitative metrics to assess and compare the performance of different analysis techniques under different scenarios. In addition, we are working on a more detailed assessment of the information content of drill telemetry data: we aim to investigate the limits of layer interface detection and estimate the accuracy of classification models under more realistic settings. Finally, even more test data will enable the pursuit of a further goal: the development of models that, in addition to a qualitative classification, also provide a direct quantitative estimate of some mechanical properties, such as the uniaxial compressive strength.
References
[1] Vago J.L. et al, Astrobiology, vol 17, n.6-7 (2017)
[2] Altieri F. et al., Advances in Space Research (2023)
How to cite: Rossi, L., Altieri, F., Frigeri, A., De Angelis, S., De Sanctis, M. C., Ferrari, M., Fonte, S., Formisano, M., Pilati, A., Clemente, M. P., Cordeschi, L., Merlo, A., Joudrier, L., Sefton-Nash, E., and Vago, J.: Assessing the information content of rover drill telemetry data for the characterization of the shallow subsurface of Mars, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-638, https://doi.org/10.5194/epsc2024-638, 2024.