
Environment Scene Representation for Dynamic Event Cognition: Towards mapping and characterizing transient events in planetary bodies

- University of Tartu, Tartu Observatory, Dept. of Space Technology, Estonia (aditya.savio.paul@ut.ee)
Transient events are characterized by continuously changing states or those which are governed by rapidly changing states. These events occur in a manner where the observational opportunities are either limited or negligible due to the event being too quick or occurring without any pre-interfaced knowledge of its occurrence. This leaves us humans with general abstract ideas of event occurrence; however no concrete information can be inferred from the event-cognition point of view. Nonetheless, the event does provide an initial understanding of our limitations both philosophical, scientific and technological-readiness, and to be prepared to study it better, in case such events occur again. Transient events in the terrestrial context relate to volcanic eruptions, hydrothermal vents/geysers and in the extraterrestrial context on other planetary surfaces like dust storms on Mars, tidal and lava motions on Jupiter and even solar flares on the sun’s surface.
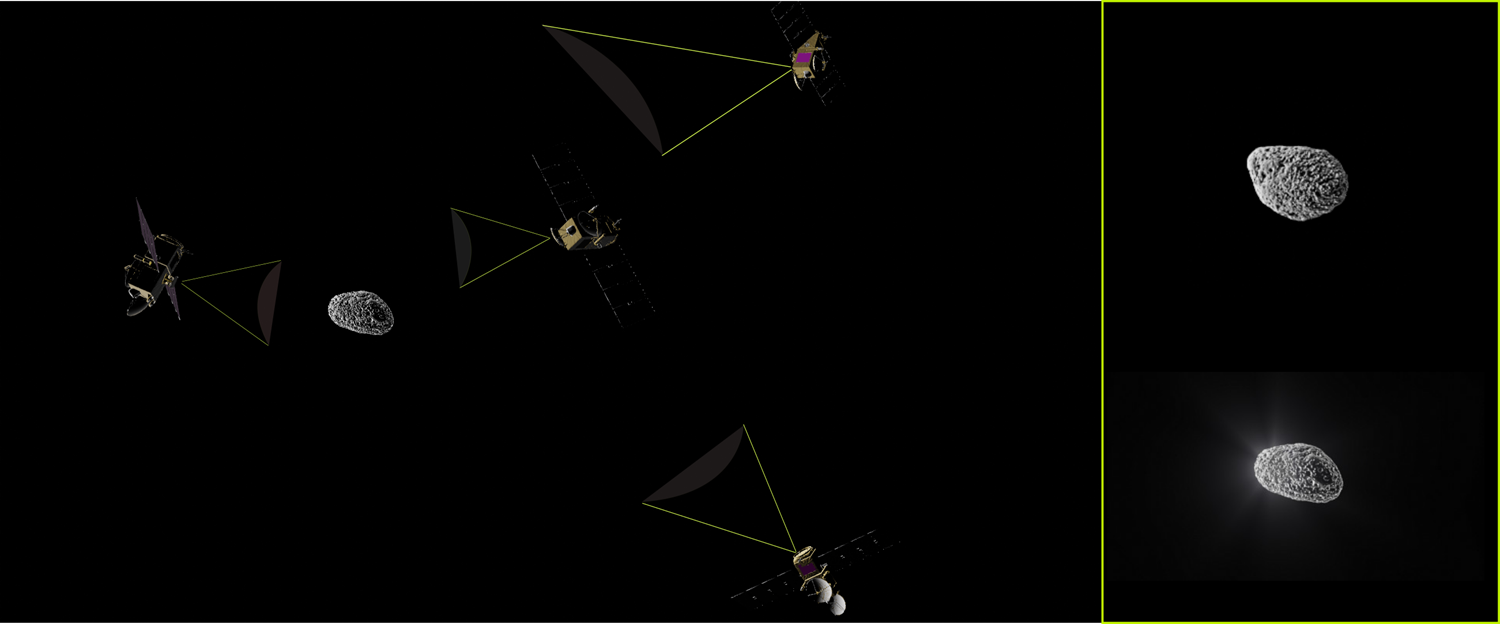
Fig 01. scene representation for plantary surface activity
However, in order to develop such approaches, it is essential that we are able to develop early cognition towards such events that may or may not catastrophic but can render the possibility of exploring, investigating, testing, validating and verification of various approaches and systems performance. This is also essential in pursuing the co-design of the systems, preferably autonomous systems able to understand the event sequences. To measure the event, it is essential that foundational models of its origin, impact, occurrence, aftermath are developed based on which further scientific progressive models can be generated.
The transient processes are not only representative of actionable events but also are relevant to environment mapping that surrounds the events or target bodies. An example is the possibility to map the erratic gravitational influences of small solar system over well-defined trajectories.
This doctoral thesis identifies the requirements of event cognition as an iterative and procedural process, while sighting the study of singular and multi-agent systems that can be deployed to survey, perform gathering operations, and pursue developmental pipelines to produce holistic and comprehensive scenes. These scenes are expected to closely represent the various phases of the event or the complete event as a whole.
In the terrestrial context, transient events are found in the likes of erupting volcanoes, geysers, and floods. In the extra-terrestrial context, they are characterized by high velocity flybys by interplanetary objects like Oumuamua, jets emancipating from the cometary bodies like 67P and activities on larger planetary bodies like dust storms on Mars and lava flows on Jupiter moons. Respecting the above-mentioned event-cognition philosophy, the thesis addresses the aspects that are essential to be able to capture dynamic events that otherwise, only allow a one-shot observational opportunity and sometimes not even that, for the requirements of producing a high scientific return. The methods are also validated at the Tartu Observatory Space Simulation Facility.
For optimal observations, it is required that scouting agents are positioned at scientifically-viable locations. For that it is essential that the effective observations space is sampled, discrete positions are identified, and trajectories are generated to ensure that our agents are present at the required location within the required time frames. The approach produces educated guesses about the probability that can be used to optimize the spacecraft/agent trajectories. The author’s work with chaotic volumetric sampler reasons the valid spatial distribution, observations from where, mission-specific scientific data from various sensors can be achieved.
A series of simulations are preformed within physics-informed simulators that are developed for the use-case of simulating either full mission or individual mission phases where the consequent spacecraft and target body activities can be represented with near scientific use cases. The simulations provide a comprehensive understanding of the science return that can be envisaged from the missions when launched. These are inclusive of simulating high-velocity flybys, relevant to the case study for the Comet Interceptor Mission or modelling the Venusian atmosphere which can also relate to other (exo)planetary bodies. The event models are inspired from heritage missions like Rosetta, Hayabusa from and active mission like Psyche and upcoming HERA mission. By performing the observations over realistic trajectories, the approach produces results that resemble near-real phases of the missions and expected outcomes from each phase.

To validate the scenarios developed in the simulation environment, the scenes are recreated within the Tartu Observatory Space Mission Simulation Centre. The spacecraft and target body interactions are developed over a series of flybys occurring at different speeds. The target samples are representation of asteroids and comets sampled from the terrestrial domain like volcanic rock islands. Further investigations involving the study of surface morphologies and feature formations like craters and boulders are pursued.
The data collected from the simulations and the analog environments are synthesized to develop scene that represent the evet with fervor and details. The routines generate the environment map with procedural cycles, where the geometry is synthesized in the spatial and the volumetric domains. Alongside reconstructed geometry, we also obtained information about the radiance field interactions with the surface and the light sources in our experiments. Moreover, with efficient scene representation, the possibility also to advance other concept like the gravitational tractor can be expanded by efficient understanding of the various forces that govern the dynamics of potentially hazardous bodies. The author’s relevant work with the autonomous replanning and gravity mapping shows, an iteratively updating gravity model can be developed by in-orbit measurements performed by a spacecraft with efficient on-board motion planning algorithm. The information obtained paves the way to the possibilities of generating more-informed scenarios including transient orbital properties like surface activities like rubble and dust motion and the forces that govern the dynamic states like gravitational perturbations and solar radiation pressure. Work towards endogenous mapping of bodies in space, are validation of the thesis. The aspects of representing a scenario in the space domain are motivated with the idea of enhancing our knowledge about the various events that occur around us and pursue efforts in protecting Earth from catastrophic event. And by all means towards the elevation of human understanding of this vast expanse, that is space.
How to cite: Paul, A. S.: Environment Scene Representation for Dynamic Event Cognition: Towards mapping and characterizing transient events in planetary bodies, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-641, https://doi.org/10.5194/epsc2024-641, 2024.