
 1,
1,- 1Institute of Planetary Research, German Aerospace Center (DLR), Berlin, Germany
- 2Institute of Geological Sciences, Freie Universität, Berlin, Germany
- 3School of Earth and Space Exploration, Arizona State University, Tempe, AZ, USA
- 4Intuitive Machines, Houston, TX, USA
- 5Puli Space Technologies Ltd, Budapest, Hungary
Introduction: With the return of mankind to the Moon in the frame of NASA's Artemis program comes the need for detailed analyses of ambient conditions and resources like e.g. water ice in possible landing regions. There are several hints to water ice deposits within permanently shadowed regions (PSRs) in the Moon's south pole area. Some of these regions might have sufficiently low temperatures to allow the presence of water ice over geological timescales [1-4] . In fact, the LCROSS experiment showed the presence of water ice within at least one of these PSR's [5].
Intuitive Machines' first mission (IM-1) recently landed successfully in Malapert crater 300 km from the south pole. Its follow-up mission IM-2 is planned to land on the Shackleton-de Gerlache connecting ridge close to the south pole in late 2024. There, IM-2's main lander Nova-C will deploy the NASA-funded Polar Resources Ice-Mining Experiment-1 (PRIME-1) - consisting of a drill and a mass spectrometer - to search for ice deposits below the surface. [6, 7]. Nova-C will also carry a smaller vehicle, the Micro-Nova hopper, which will perform a series of short flights across the surface and land in a PSR. The hopper's payload consists of a set of cameras, a neutron spectrometer (PLWS), and the Lunar RADiometer (LRAD).
The LRAD Instrument: The Lunar Radiometer's purpose is to measure the surface brightness temperature inside a PSR, thus providing ground truth for thermophysical models of the south polar region. Specifically, LRAD measures the radiative flux in the thermal infrared range [8, 9, 10]. To that end it houses six thermopile sensors, equipped with individual IR-filters to fulfill specific scientific measurement goals. These are:
-
Determination of surface brightness temperature in the illuminated and shadowed terrain.
-
Determination of the mm to cm-scale surface roughness.
- Determination of surface thermal inertia.
The thermopile sensors are situated inside the sensor head having a radiation shield, reflective coating and heaters for temperature control. To decouple the sensor head thermally from the rest of the hopper, the head is attached to the hopper using PEEK brackets. (Fig. 1) A low-thermal conductivity flex harness connects the sensor head to the avionics box.
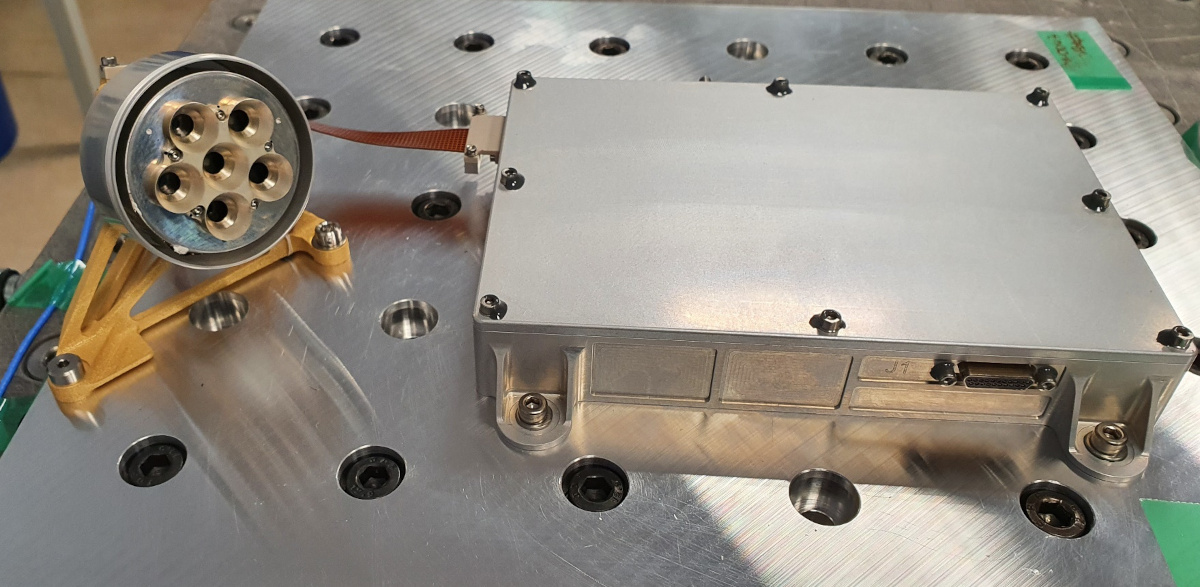
Figure 1: LRAD's components during a vibration test. Left: Sensor head and PEEK mounting brackets. Right: Avionics box. Sensor head and avionics box are connected via a low-thermal conductivity flex harness. (© DLR (CC BY-NC-ND 3.0))
Calibration: We describe the relation between target temperature T and the signal voltage U by a form of the Sakuma-Hattori interpolation equation
U = R * exp(- c2 /(A*T+B)) - R * exp(- c2 /(A*TS +B)) + SH*PH + Uoff
where c2 is the second radiation constant while R, A, B, SH and Uoff are adjustable parameters. PH is the heating power used to stabilize the sensor head at the chosen setpoint, and the factor SH corrects for the instrument background radiation slightly varying with PH.
LRAD underwent radiometric calibration in a small vacuum chamber equipped with a He-cooled cold head (Fig. 3 and 4). The sensor head was placed inside a temperature-controlled aluminum box representing the thermal environment while viewing a blackbody mounted to the cold head. By varying the blackbody temperature from 70-330 K and the box temperature between 200 K and 280 K the five calibration coefficients could be fitted for each thermopile channel. The estimated uncertainty of the brightness temperature measurement (using the longpass filters), including systematic disturbances, is 10 K for a target temperature of 80 K and 5 K for a target temperature of 100 K.

Figure 2: Brightness temperatures inverted during calibration and deviation from blackbody temperature.
Summary: As part of Intuitive Machines' second mission IM-2, LRAD will measure the brightness temperature of regolith near the lunar south pole, thus performing the first in-situ temperature measurements within a PSR. Here we report on the calibration of the instrument.
Acknowledgements: LRAD is supported by the German Federal Ministry for Economic Affairs and Climate Action on the basis of a decision by the German Bundestag. Grant: 50OW2103
References:
[1] Feldman, W.C., et al. (1998) Science, 281, 5382, 1496-1500
[2] Hayne, P.O., et al. (2015) Icarus, 255, 58-69
[3] Rubanenko, L. et al., (2019) Nat. Geosci,12, 597-601
[4] Hayne, P. O., et al. (2021). Nat. Astr., 5, 169
[5] Colaprete, A., et al. (2010) Science, 330, 6003, 463-468
[6] Atwell, M., et al., (2020). Lunar Surface Science Workshop 2020, 6011
[7] Voosen, P., et al., (2021). Science, 373, 6560, 1188-1192
[8] Spohn, T., et al. (2007). Space Sci. Rev., 128, 339
[9] Grott, M., et al., (2017). Space Sci Rev., 208, 413
[10] Spohn, T., et al. (2018). Space Sci. Rev., 214, 96.
How to cite: Knollenberg, J., Ziese, R., Hamm, M., Grott, M., Robinson, M. S., Mabe, K., Pacher, T., Martin, T., and Rauer, H.: Calibration Of The Lunar Radiometer (LRAD) For Intuitive Machine’s Micro-Nova Hopper., Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-837, https://doi.org/10.5194/epsc2024-837, 2024.