
 1,1,2,1,1,3,
1,1,2,1,1,3,- 1Finnish Meteorological Institute, Helsinki, Finland
- 2Aurora Propulsion Technology, Espoo, Finland
- 3SpaceR-SnT/University of Luxembourg, Kirchberg-Luxembourg
- 4GRADEL S.a.r.l., Ellange, Luxembourg
Dragliner [1, 2] is an ESA funded study to define the requirements and a preliminary design of a passive Coulomb Drag based deorbit system capable of bringing down LEO spacecrafts in an order of magnitude shorter time than the current regulations for the re-entry time for the spacecraft (25 years), while using significantly less spacecraft resources compared to traditional deorbiting methods like chemical or electric propulsion. Other main requirements for the deorbiting system are low mass and independence from the spacecraft resources. The study is led by Finnish Meteorological Institute, and the other consortium partners are Aurora Propulsion Technology, GRADEL sarl and SpaceR-SnT/University of Luxembourg. The current goal for Technology Readiness Level of the project is 4.
The Dragliner system utilizes a Coulomb Drag microtether, also known as a plasma brake), i.e. tether that utilizes momentum from ionospheric plasma ram flow by electrostatic interaction [3, 4]. In this project, microtether is defined as a tether that does not exceed the mass limit of 200 milligrams per length of 1 meter, which makes it safe to other space assets in the event of a collision (the energy of collision is comparable to micrometeroid impact).
The main mission requirements for the Dragliner are:
- Dragliner shall be able to deorbit a Low Earth Orbit satellite (uncontrolled re-entry) of max. 250 kg mass to 400 km altitude. If the original orbit height is less than 850 km, the deorbit time shall be less than 2 years, with the goal of less than 100 days.
- Dragliner shall be an autonomous, passive bolt-on device that does not use spacecraft resources after it has been triggered to deploy by a ground command. After deployment the host spacecraft does not need to be active.
- The mass fraction of Dragliner to the host spacecraft shall be lower than 5%.
- The reliability of the whole system shall be better than 95%, and the risk of premature deployment less than 0.1%.
Coulomb drag deorbiting time depends on the combination of spacecraft’s mass, orbit height and length of the microtether. To achieve the required deorbiting time for 250 kg spacecraft from 850 km, 10 km long microtether is needed. Currently the practical limit for microtether length is 5 km, so in this case the tether is divided into two separate modules, with 5 km of tether each.
The Main Tether of Dragliner must be electrically conductive to allow electrical charging that enables the Coulomb Drag effect, and tolerant to micrometeoroid impacts. The Dragliner tether is manufactured at Finnish Meteorologial Institute from 4 Aluminum wires of 50 um diameter, mechanically twisted to form a “Hoytether-like” structure [5]. With this configuration, the risk of complete severance of a 5-km tether during 1 year in orbit is low enough to fulfil the 95% reliability requirement of the full Dragliner system.

Figure 1: 4-wire tether from 50 um Al 2024 wire produced by FMI manual tether factory
In addition to kilometers long Main Tether, Dragliner contains also a significantly shorter (tens of meters) conductive Tape Tether that serves as an electron collecting surface for the operation of the Main Tether.
One Dragliner module consists of a Base Unit containing mechanical and electrical interfaces to the spacecraft, and a Remote Unit housing the tethers and the electronics. The size of the Remote Unit is equivalent to 3U CubeSat. During the operational lifetime of the spacecraft, Dragliner remains in stowed configuration, relying on the spacecraft for power and communications via umbilical connectors. When the spacecraft decommissioning starts, the Dragliner system shall be commanded to deploy. All Dragliner functions after the deployment signal has been given will be autonomous.
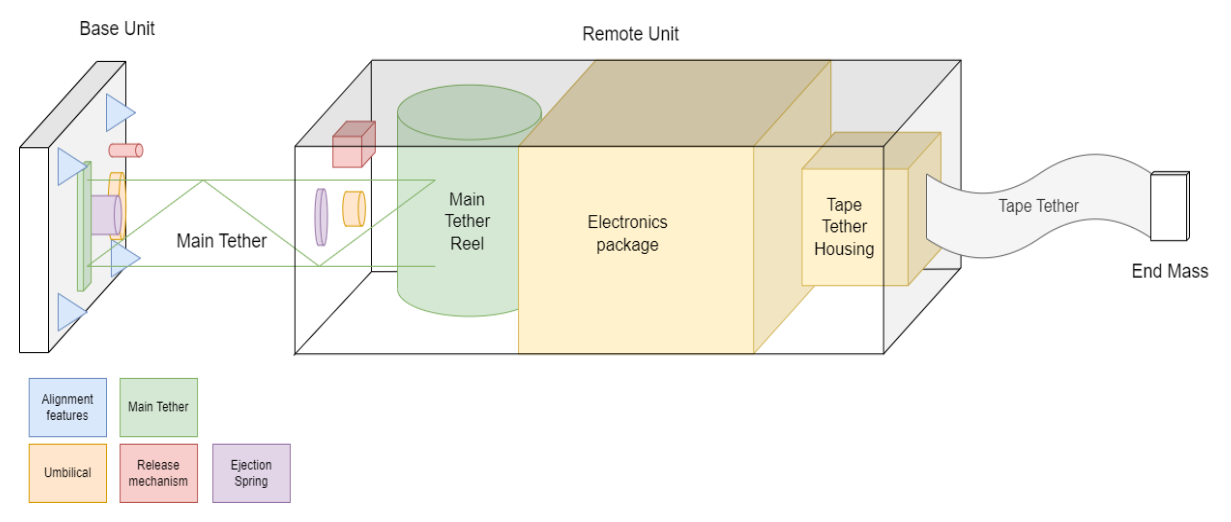
Figure 2: Physical architecture of Dragliner (not in scale)
In the beginning of the deployment process, as the Remote Unit is released from the Base Unit, the umbilical electrical connectors to the spacecraft are severed, and Dragliner starts to operate completely autonomously, including mechanical deployment of the tethers and harvesting its own energy with solar panels attached to the sides of the Remote Unit. After the deployment (lasting a few hours) is completed, the Deorbit System charges the Main Tether with ∼1 kV high voltage, enabling the Coulomb Drag effect and deorbiting of the spacecraft. The spacecraft does not need to be operational during the deorbiting phase.
The Dragliner project has passed its System Requirements Review and Preliminary Design Review in 2023. The deployment of the Main Tether (scaled-down length) and the Remote Unit, which is one of the critical functions of Dragliner system, is tested with a Dragliner Breadboard model in Zero-G lab of SpaceR-SnT/University of Luxembourg. The lab is is designed to emulate space related scenarios under microgravity conditions [6, 7]. The tests are scheduled for May 2024. In the tests, the Base Unit will be attached to a floating platform and the Remote Unit to a stationary robotic manipulator. When the deployment is executed, the freely floating platform with the Base Unit will start to move away from the Remote Unit simultaneously deploying the Main Tether. The deployment length is limited by the room dimensions.
The Dragliner project is carried out under a programme of and funded by the European Space Agency under the ESA Contract No. 4000138811/22/NL/MM/fm.
[1] Genzer, M. et al. Project DragLiner: harnessing plasma Coulomb drag for satellite deorbiting to keep orbits clean, EGU23-14692
[2] Peitso Pyry et al. Plasma Brake for Deorbiting Telecommunication Satellites, SP2024_paper #490
[3] Janhunen P., Electrostatic plasma brake for deorbiting a satellite, J. Prop. Power, 26, 370-372, 2010.
[4] Janhunen, P., Simulation study of the plasma-brake effect, Ann. Geophys., 32, 1207-1216, 2014.
[5] Toivanen P. et al, Robust Flight Tether for In-Orbit Demonstrations of Coulomb Drag Propulsion, Aerospace 2024, 11(1), 62
[6] M. Olivares-Mendez et al. Zero-g lab: A multi-purpose facility for emulating space operations. Journal of Space Safety Engineering, pages 509 – 521, 2023
[7] B. C. Yalcın et al. Lightweight floating platform for ground-based emulation of on-orbit scenarios. IEEE Access, pages 94575 – 94588, 2023.
How to cite: Genzer, M., Janhunen, P., Yli-opas, P., Peitso, P., Haukka, H., Hieta, M., Laurila, H., Pietikäinen, P., Hallamaa, H., Sinkko, J., Toivanen, P., Polkko, J., Yalcin, B. C., Olivares-Mendez, M., and Macieira, D.: Dragliner – Tether Based System for Passive Spacecraft Deorbiting Using Coulomb Drag, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-852, https://doi.org/10.5194/epsc2024-852, 2024.