
Global mapping of boulders on the lunar surface with deep learning
 1,4
1,4- 1Institut für Planetologie, Universität Münster, Münster, Germany
- 2Center for Space and Habitability, University of Bern, Bern, Switzerland
- 3European Space Astronomy Centre (ESAC) European Space Agency, Villanueva de la Cañada, Madrid, Spain
- 4European Space Research and Technology Centre (ESTEC) European Space Agency, Noordwijk, The Netherlands
Introduction
Impact craters on the lunar surface are surrounded by boulders, rock fragments larger than 25.6 cm [1], which formed during the ejecta emplacement. These boulders are exposed on the surface and thus subject to meteoroid bombardment leading to two main erosional effects: abrasion and shattering [2]. Their abundance decreases with time producing regolith. By analyzing boulder fields, key information on regolith formation and evolution, as well as information about the subsurface rockiness of geologic units exposed by rock-excavating craters can be derived.
For this, global information of the distribution and size of boulders around impact craters is crucial. Currently, the only available global rock abundance map was derived with NASA’s Lunar Reconnaissance Orbiter (LRO) Diviner instrument [3] with an effective resolution of down to 330 m [4] but the dataset does not contain information about individual boulders. LRO Narrow Angle Camera (NAC) [5] images with resolutions of down to 0.5 m cover almost the entire lunar surface and are thus the best currently available source to map individual boulders on a global scale. For the vast majority of the more than 3 million available images, boulders have not been mapped. Compared to manual boulder counting, automated mapping of boulders allows for a substantially faster and reproducible analysis [e.g., 6-9].
Methods
Because of its great success in computer vision problems in various disciplines, we chose a deep learning approach for our boulder detection algorithm. Moreover, previous studies showed the feasibility to use deep learning for global mapping of the lunar surface [e.g., 10, 11]. Recently, we presented our boulder segmentation model [12], which utilizes Mask R-CNN [13] for a regional analysis with single NAC images. For the global analysis, we are now using the object detection model YOLOv8 [14, 15] to reduce the computational cost and required memory.
We utilize the publicly available calibrated pyramid tiff files of the LRO NAC images, which are reduced to 8bit but provide full spatial resolution. The model was trained with 512x512 pixel image tiles created from LRO NAC images displaying boulder fields and background. For all tiles, we manually mapped the boulders by creating a bounding box around the illuminated part. Currently, our dataset contains 12,000 mapped boulders with diameters > 2 m and 650 images.
Next, we applied the trained model to the lunar surface. As there is currently no global LRO NAC mosaic available, we developed an image selection algorithm. For each point on the lunar surface, from the NAC images covering that point, the one with the highest resolution is selected, while we only consider incidence angles between 35° and 75°. Each selected NAC image is then split into tiles and passed to the trained YOLO model for boulder detection.
Preliminary results
Currently, the model achieves an average precision of 65% with a precision of 66% and recall of 60% for the images of the validation set (Fig. 1). Most false negatives occur for small, likely highly abraded rocks with a reflectance that differs visually only slightly from the background regolith. False positives are mainly caused by outcrops whose boundaries cannot be clearly determined. The performance can be improved, e.g., by adding more examples of mapped boulders.
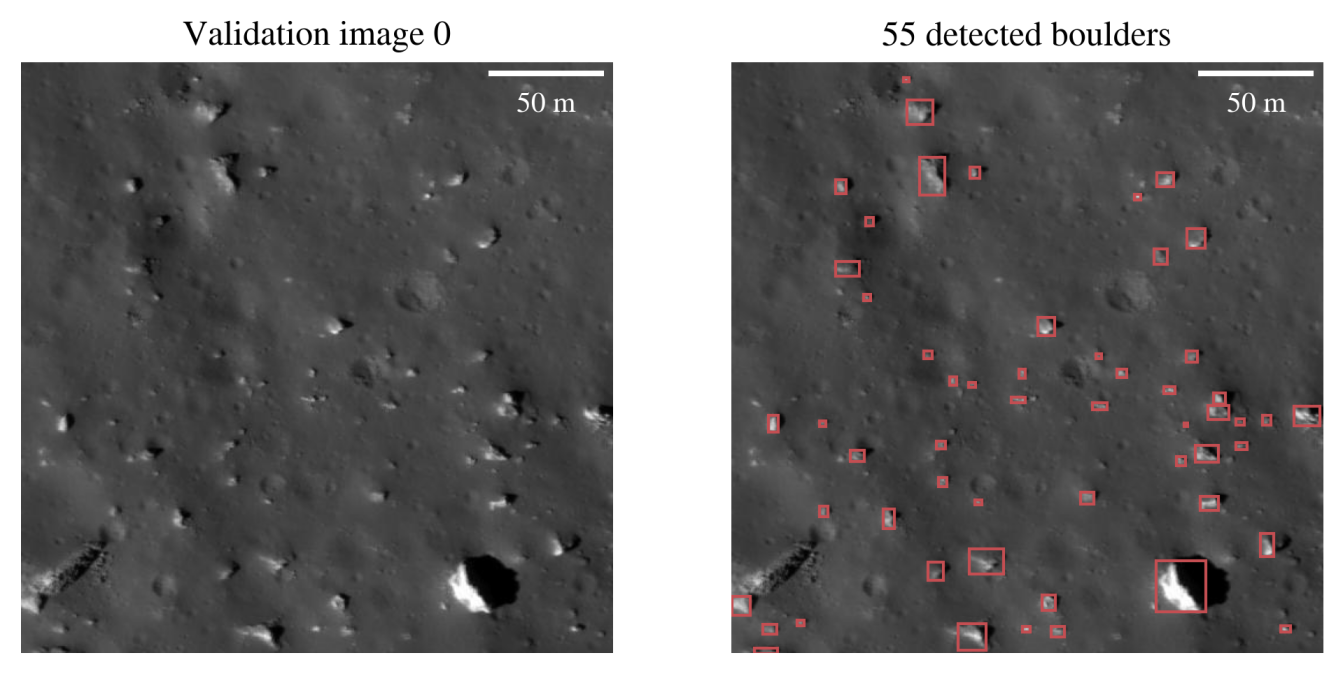
Figure 1: Examples of the detections (right) for a validation image (left, subframe of NAC image M112671946RC).
The model detects most boulders around impact craters correctly for regions that were not included in the training and validation process (Figs. 2 and 3). It can distinguish between background, particularly consisting of small craters, and boulders, which both display shadows. Boulders on crater walls remain mostly undetected, likely because of different lighting conditions currently not present in the training set and because of large shadows hiding boulders. Moreover, the specific lighting conditions for the utilized NAC images also influence the quality of the detections for boulders around craters, creating bands of differing absolute boulder abundances (Fig. 3). The mitigation of this effect is subject to current development.
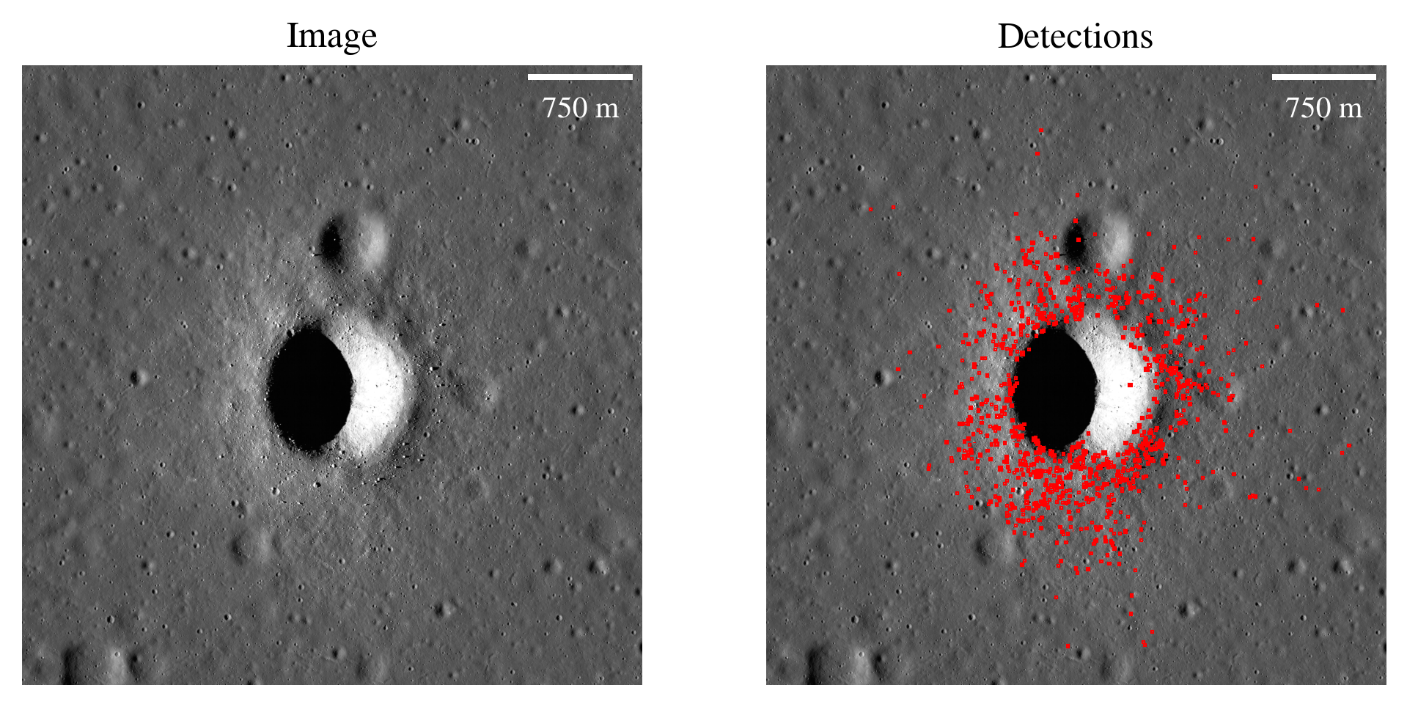
Figure 2: Examples of the detections (right) for a subframe of NAC image M193103501LC (left), which was not included in the training or validation set.
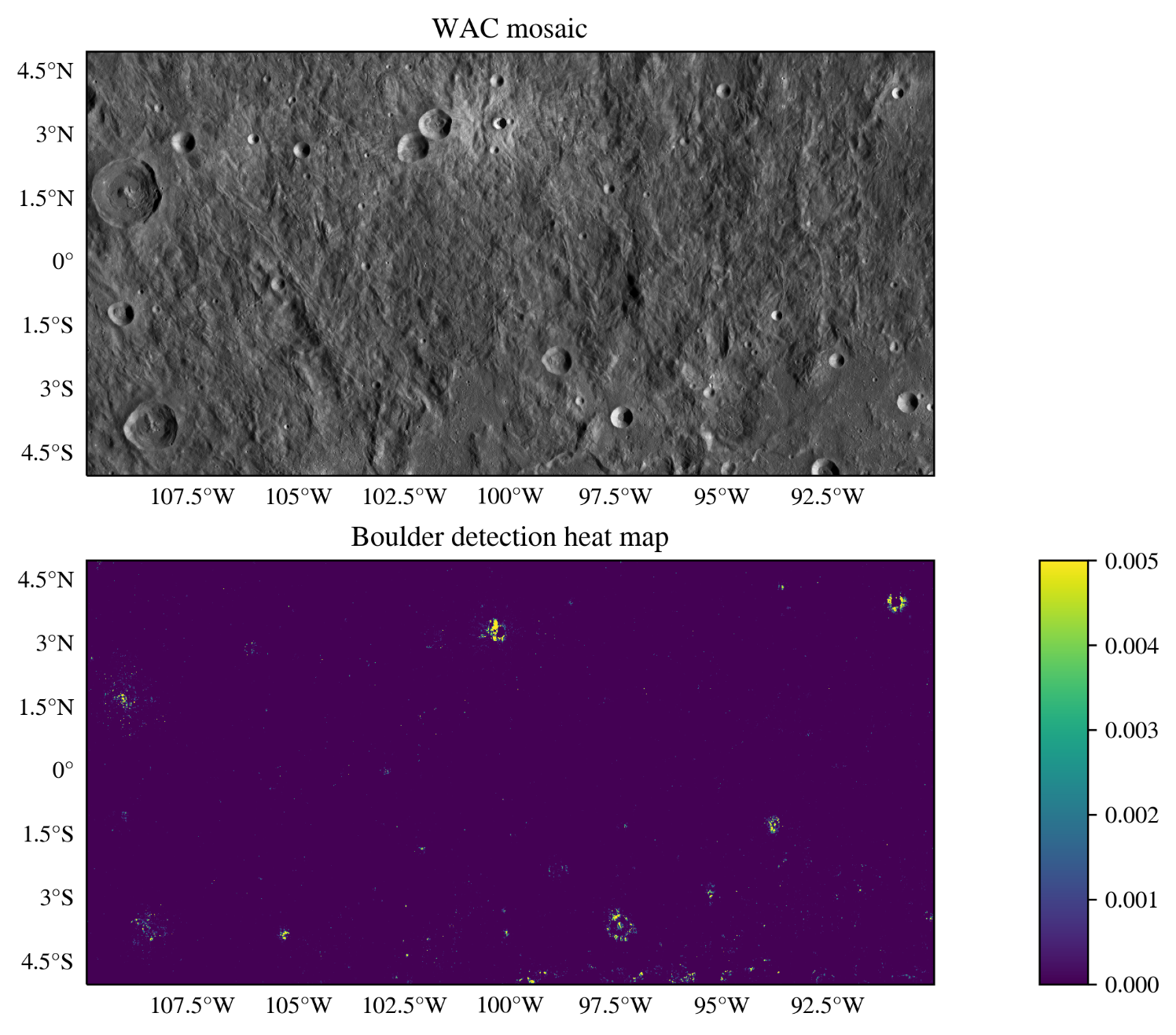
Figure 3: Example of a regional heat map of the boulder abundance (bottom), defined as the areal fraction of the detected boulders. For context, the publicly available mosaic, derived from LRO’s Wide Angle Camera [5] images, is shown for the same region (top).
Outlook
We are developing a deep learning model that can automatically map boulders in LRO NAC images, allowing for a reproducible analysis on a global scale. To improve the performance of the model and to minimize the effects of the specific illumination conditions, we plan to extend the training set. The model will then be used to derive a global map of boulders on the lunar surface to answer key questions about regolith formation and evolution and to improve thermophysical models of the lunar surface.
References
[1] Dutro J. T. J., Dietrich, R. V. and Foose, R. M. (1989), AGI data sheets for geology in the field, laboratory, and office.
[2] Hörz F. et al. (2020) PSS, 194, 105105.
[3] Paige D. A. et al. (2010) Space Sci. Rev., 150, 125-160.
[4] Powell T. M. et al. (2023) JGR : Planets, 128, e2022JE007532
[5] Robinson M. S. et al. (2010) Space Sci. Rev., 150, 81-124.
[6] Li Y. and Wu B. (2018) JGR : Planets, 123, 1061-1088.
[7] Bickel V. T. et al. (2019) IEEE Trans. Geosci. Remote Sens., 57, 3501-3511.
[8] Zhu L. et al. (2021) Remote Sens., 13, 3776.
[9] Prieur N. C. et al. (2023) JGR : Planets, 128, e2023JE008013.
[10] Bickel V. T. et al. (2020) Nat. Commun., 11, 2862.
[11] Rüsch O. and Bickel V. T. (2023), Planet. Sci. J., 4, 126.
[12] Aussel B. and Rüsch O. (2024) LPSC 55, Abstract #1834.
[13] He K. et al. (2017) Proc. IEEE Int. Conf. Comput. Vis., 2961-2969.
[14] Redmon J. et al. (2016) Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit., 779-788
[15] Jocher G., et al. (2023) Github, Ultralytics YOLO (Version 8.0.0), https://github.com/ultralytics/ultralytics.
How to cite: Aussel, B., Rüsch, O., Gundlach, B., Bickel, V. T., Kruk, S., and Sefton-Nash, E.: Global mapping of boulders on the lunar surface with deep learning, Europlanet Science Congress 2024, Berlin, Germany, 8–13 Sep 2024, EPSC2024-998, https://doi.org/10.5194/epsc2024-998, 2024.