We analyze data of the Mercury Laser Altimeter (MLA) aboard the MErcury Surface, Space ENvironment, GEochemistry, and Ranging (MESSENGER) spacecraft to infer Mercury’s reaction to tidal forces. The combination of the surface displacement, parametrized by the Love number h2, and the change in the gravity field, parametrized by the Love number k2, due to tides, can be used to reveal the existence and size of Mercury’s solid inner core (Steinbrügge et al., 2018). This in turn provides important constraints on Mercury’s thermal evolution and dynamo.
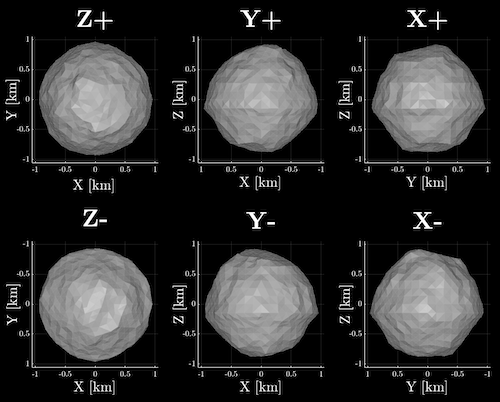
The MLA has delivered more than 40 million measurements of the shape of Mercury at about 26 million individual footprint locations. These locations are focused around the North Pole, with 78.5% of all measurements located between 50° N and 84° N. The topography at the footprint location is determined from the position of the spacecraft, the orientation of the instrument, and the measured range to the surface.
Previously, two methods have been proposed for the retrieval of tidal surface displacements from laser altimetry data: The crossover method (e.g., Mazarico et al., 2014) and a global approach, which simultaneously solves for global topography and h2 (Thor et al., 2020). In the global approach, the topography is parametrized as an expansion in 2D cubic B-splines on an equirectangular grid with resolutions reaching up to 32 grid cells per degree.
Here, we investigate the possibility to substitute the solution for topography in the global approach by the usage of a prescribed topographic model. This so-called direct altimetry approach has not been applied to the problem of retrieving tides from laser altimetry yet. We use a high-resolution (64 pix / degree) digital terrain model (DTM) obtained by photogrammetric evaluation of images obtained by the Mercury Dual Imaging System (MDIS, Becker et al., 2016) and compare the MLA topographic values to the corresponding values at the MLA measurement locations interpolated from the MDIS DTM.
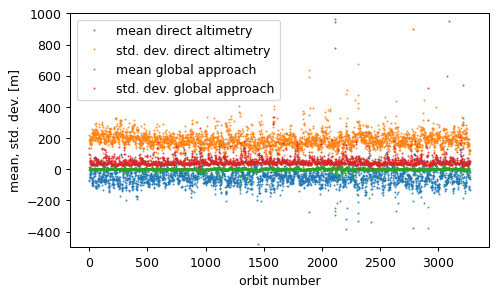
Figure 1: Mean and standard deviation of the residuals of the MLA measurements of each MESSENGER orbit, with respect to the MDIS data (direct altimetry approach) and to the topographic model obtained from the fit (global approach), respectively.
Fig. 1 shows the statistics of residuals between MLA topographic values and interpolated MDIS DTM values as well as the residuals of the adjustment applied in the global approach with a resolution of 16 grid cells per degree, equivalent to 2.7 km at the equator. The standard deviations over the entire data set are 83.59 m for the global approach and 251.06 m for the direct altimetry, respectively.
First, we note that for several orbits mean and standard deviation significantly exceed the usual levels. For both methods a careful elimination of outliers is indispensable. Outliers can be found in the MLA data per orbit and at individual measurements. The former type is likely related to the orbit determination process. Second, we note that even though the resolution of the DTM is at 64 pix / degree four times larger than the shown resolution of 16 grid cells per degree for the topographic model obtained in the global fit, its effective resolution is lower, leading to higher residuals. This shows that the photogrammetric DTM of Becker et al. (2016) has a worse fit to the MLA data than a coarser model derived from the MLA data itself. Therefore, the retrieval of the tidal signal from the photogrammetric DTM is challenging.
Future application of updated DTMs (Preusker et al. 2017) could remedy the low effective resolution when globally available. Furthermore, the co-registration of the MLA measurements to the DTM might lead to a better fit. However, this procedure comes with the concern that the stereo-photogrammetric generation of DTMs neglects tidal deformations.
References
Steinbrügge, G., Padovan, S., Hussmann, H., Steinke, T., Stark, A., & Oberst, J. (2018). Journal of Geophysical Research: Planets, 123, 2760– 2772.
Mazarico, E., Barker, M. K., Neumann, G. A., Zuber, M. T., and Smith, D. E. (2014), Geophys. Res. Lett., 41, 2282– 2288
Thor, R. N., Kallenbach, R., Christensen, U. R., Stark, A., Steinbrügge, G., Di Ruscio, A., ... & Oberst, J. (2020). Astronomy & Astrophysics, 633, A85.
Becker, K. J., Robinson, M. S., Becker, T. L., Weller, L. A., Edmundson, K. L., Neumann, G. A., ... & Solomon, S. C. (2016). In Lunar and planetary science conference (Vol. 47, p. 2959).
Preusker, F., Stark, A., Oberst, J., Matz, K. D., Gwinner, K., Roatsch, T., & Watters, T. R. (2017). Planetary and Space Science, 142, 26-37.